关于RANSAC的理解
先说最小二乘。
ok,你手头有一堆数据,比如这些蓝点:
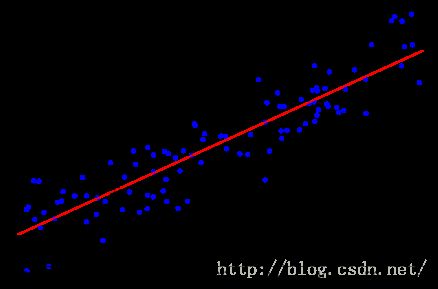
那么我们假设它符合一个直线模型:y=ax+b,用最小二乘就可以很容易求解出未知参数a和b。最小二乘大法确实好哇,毕竟高斯用它来估计谷神星的轨道(https://math.berkeley.edu/~mgu/MA221/Ceres_Presentation.pdf;http://www.cnblogs.com/washa/p/3164212.html)。
但是,当你的数据充满了噪声时,比如下面图中的黑点,很明显中间有一条妥妥的直线,但是你也用最小二乘去解它,于是悲剧了:

很显然最小二乘失效了,这时候我们就要用RANSAC去解决它。
RANSAC的使用条件是:
1.输入是一组带污染的观测数据,其中的可信数据占了大多数;
2.有一个可以解释可信观测数据的参数化模型
RANSAC的思想是(引自wiki,汉化部分有修改):
- Select a random subset of the original data. Call this subset the hypothetical inliers. 从观测数据中随机选择一个子集,称之为hypothetical inliers。
- A model is fitted to the set of hypothetical inliers.估计出适合于这些个hypothetical inliers的模型
- All other data are then tested against the fitted model. Those points that fit the estimated model well, according to some model-specific loss function, are considered as part of the consensus set. 用这个模型测试其他的数据,根据损失函数,得到符合这个模型的点,称为一致性集合:consensus set。
- The estimated model is reasonably good if sufficiently many points have been classified as part of the consensus set. 如果足够多的数据都被归类于一致性集合,那么说明这个估计的模型是正确的;如果这个集合中的数据太少,那么说明模型不合适,弃之,返回第一步。
- Afterwards, the model may be improved by reestimating it using all members of the consensus set.最后,根据一致性集合中的数据(可以认为是可靠的数据了),用最小二乘的方法重新估计模型。
根据上述思想,如果不停的迭代,就会得到一个最优的模型。如下图所示:

RANSAC有什么用?
可以用于图像拼接,如果你年纪比较大,应该记得Microsoft有一款叫photosynth的产品:

怎么用RANSAC拼接呢?
图像和图像之间的关系可以用一个单应性矩阵描述,即x1=H*x2。
x1和x2就是同名点齐次坐标向量,我们可以用SIFT或SURF算子找到:
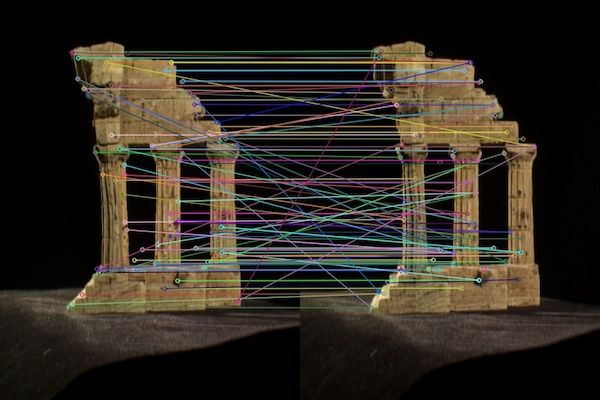
但是可以看出,虽然大部分匹配是正确的,但有一些匹配是错误,这些同名点就构成了“受污染的观测数据”,也是RANSAC的适用条件。
用RANSAC估计H的步骤如下(参考http://eric-yuan.me/ransac/):
- Select four feature pairs (at random) 随机找4对特征点
- Compute homography H 计算H
- Compute inliers where ||pi’, H pi|| < ε (if not enough times, goto 1.) 找到符合H的inliers
- Keep largest set of inliers 直到这个H有最多的inliers
- Re-compute least-squares H estimate using all of the inliers 用inliers和最小二乘重新估计H
同名点齐次坐标和H的关系可以写为:

4个点对正好构成唯一解,http://eric-yuan.me/ransac/中用QR分解的方法求出H。不停迭代,直到求出最终的inliers,到第5步用最小二乘求解H时,可以用SVD分解(http://blog.csdn.net/dsbatigol/article/details/9625211)。
基于OpenCV的图像拼接的代码在这里:https://ramsrigoutham.com/tag/ransac/,随手贴上来,并感谢作者:
#include
#include
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
void readme();
/** @function main */
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; }
// Load the images
Mat image1= imread( argv[2] );
Mat image2= imread( argv[1] );
Mat gray_image1;
Mat gray_image2;
// Convert to Grayscale
cvtColor( image1, gray_image1, CV_RGB2GRAY );
cvtColor( image2, gray_image2, CV_RGB2GRAY );
imshow("first image",image2);
imshow("second image",image1);
if( !gray_image1.data || !gray_image2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector< KeyPoint > keypoints_object, keypoints_scene;
detector.detect( gray_image1, keypoints_object );
detector.detect( gray_image2, keypoints_scene );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( gray_image1, keypoints_object, descriptors_object );
extractor.compute( gray_image2, keypoints_scene, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_object.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Use only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_object.rows; i++ )
{ if( matches[i].distance < 3*min_dist )
{ good_matches.push_back( matches[i]); }
}
std::vector< Point2f > obj;
std::vector< Point2f > scene;
for( int i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
}
// Find the Homography Matrix
Mat H = findHomography( obj, scene, CV_RANSAC );
// Use the Homography Matrix to warp the images
cv::Mat result;
warpPerspective(image1,result,H,cv::Size(image1.cols+image2.cols,image1.rows));
cv::Mat half(result,cv::Rect(0,0,image2.cols,image2.rows));
image2.copyTo(half);
imshow( "Result", result );
waitKey(0);
return 0;
}
/** @function readme */
void readme()
{ std::cout << " Usage: Panorama < img1 > < img2 >" << std::endl; } 最后提一句,RANSAC称为RANdom SAmple Consensus,即随机采样一致算法,发表于1981:
- Martin A. Fischler & Robert C. Bolles (June 1981). "Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography" (PDF).