- 每日一题——第九十题
互联网打工人no1
C语言程序设计每日一练c语言
题目:判断子串是否与主串匹配#include#include#include//////判断子串是否在主串中匹配//////主串///子串///boolisSubstring(constchar*str,constchar*substr){intlenstr=strlen(str);//计算主串的长度intlenSub=strlen(substr);//计算子串的长度//遍历主字符串,对每个可能得
- [AI资讯·0605] GLM-4系列开源模型,OpenAI安全疑云,ARM推出终端计算子系统,猿辅导大模型备案……
老牛同学
AI人工智能ai大模型AI资讯
AI资讯1毛钱1百万token,写2遍红楼梦!国产大模型下一步还想卷什么?AI「末日」突然来临,公司同事集体变蠢!只因四大聊天机器人同时宕机OpenAI员工们开始反抗了!AI手机PC大爆发,Arm从软硬件到生态发力,打造行业AI百宝箱GLM-4开源版本:超越Llama3,多模态比肩GPT4V,MaaS平台也大升级猿辅导竟然是一家AI公司?大模型全家桶曝光|甲子光年FineChatBI,帆软在AI方
- 遗传算法(Genetic Algorithm,GA)-基于MATLAB环境实现
朱佩棋(代码版)
启发式算法启发式算法算法matlab
1.GA简介geneticalgorithm,美国Holland教授创立,基于达尔文进化论和孟德尔的遗传学说。遗传算法类比了生物界中自然选择、交叉、变异等自然进化方式,利用数码串类比染色体,通过选择、交叉、变异等遗传算子模拟生物的进化过程。1.1遗传算法的流程1.编码伪代码:2.产生初始群体Chooseinitialpopulation3.计算适应度Evaluatethefitnessofeach
- MATLAB车牌定位和识别系统
清风明月来几时
图像算法处理matlab开发语言
有很多方法可以实现MATLAB车牌的定位和识别系统。以下是一种可能的实现步骤:车牌定位:使用图像处理技术(如边缘检测、区域生长或颜色分割)来检测图像中的车牌区域。使用形态学操作来排除不符合车牌形状的区域。对车牌区域进行裁剪或调整大小,以便后续的识别。车牌识别:将车牌图像转换为灰度图像。使用图像处理技术(如二值化、滤波或增强)来减少噪音并突出字符。使用字符分割算法将车牌中的字符分开。使用特征提取方法
- MATLAB车牌识别系统
清风明月来几时
图像算法处理matlab开发语言
MATLAB车牌识别系统是一个基于MATLAB开发的用于识别和提取车牌信息的系统。该系统使用图像处理和机器学习算法来实现车牌的定位和字符识别。以下是一个基本的MATLAB车牌识别系统的工作流程:图像预处理:首先,将输入的图像进行预处理,包括灰度化、高斯平滑、边缘检测等操作,以提高后续的车牌定位和字符识别的准确性。车牌定位:在预处理后的图像中,使用形态学运算和边缘检测算法来寻找车牌的位置。这可以通过
- 电影《少年的你》为什么撤档?周冬雨和易烊千玺演的不好吗?
虫子天下
电影《少年的你》官宣撤档,择时公布新的档期!网友:继续等!嗨,大家好!虫子天下谈娱乐第三百八十六期上线啦!上一期,虫子天下给大家说的是,在昨天晚上的极限挑战当中,“神算子”传人张艺兴已经算准了一切,却还在游戏的最后关头输了游戏的事情。在这中间,迪丽热巴和王迅的表现,真的是很棒的!这一期,咱们来聊聊电影《少年的你》的话题。号虫子天下原创娱乐点评,禁止抄袭!今天是6月24日,距离原定的上线日期6月27
- 【Python第三方库】OpenCV库实用指南
墨辰JC
Pythonopencvpython人工智能学习
文章目录前言安装OpenCV读取图像图像基本操作获取图像信息裁剪图像图像缩放图像转换为灰度图图像模糊处理边缘检测图像翻转图像保存视频相关操作方法讲解读取视频从摄像头读取视频前言OpenCV(OpenSourceComputerVisionLibrary)作为一个强大的计算机视觉库,提供了丰富的图像处理和计算机视觉功能,尤其在图像识别、对象检测、视频分析等领域有着广泛的应用。本文将带领读者使用Pyt
- 寂寞沙洲冷
水笔仔o12530
卜算子黄州定慧院寓居作缺月挂疏桐,漏断人初静。谁见幽人独往来,飘渺孤鸿影。惊起却回头,有恨无人省。捡尽寒枝不肯栖,寂寞沙洲冷。原来出自苏轼大大的词啊。寂寞沙洲冷(周传雄)自你走后心憔悴白色油桐风中纷飞落花似人幽情这个季节河畔的风放肆拼命的吹无端拨弄离人的眼泪那样浓烈的爱再也无法给伤感一夜一夜当记忆的线缠绕过往支离破碎是慌乱占据了心扉有花儿伴着蝴碟孤燕可以双飞夜深人静独徘徊当幸福恋人寄来红色分享喜悦
- 13.Spark Core-Spark中广播变量和累加器
__元昊__
一、前述Spark中因为算子中的真正逻辑是发送到Executor中去运行的,所以当Executor中需要引用外部变量时,需要使用广播变量。累机器相当于统筹大变量,常用于计数,统计。二、具体原理1、广播变量广播变量理解图image注意事项1、能不能将一个RDD使用广播变量广播出去?不能,因为RDD是不存储数据的。可以将RDD的结果广播出去。2、广播变量只能在Driver端定义,不能在Executor
- opencv 梯度幅值_基于OpenCV的图像梯度与边缘检测!
莫仝汉
opencv梯度幅值
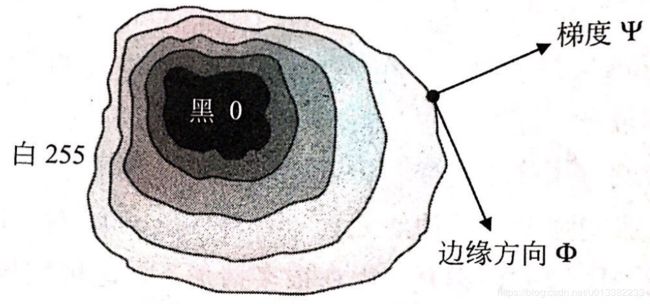
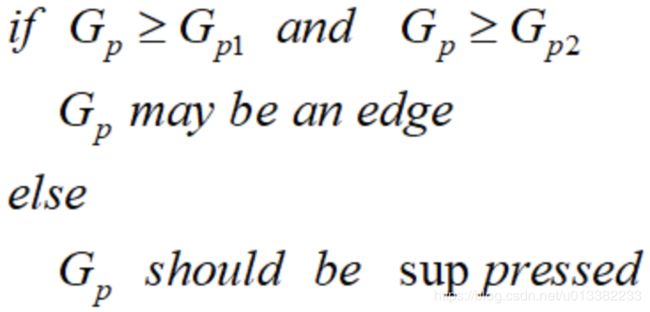
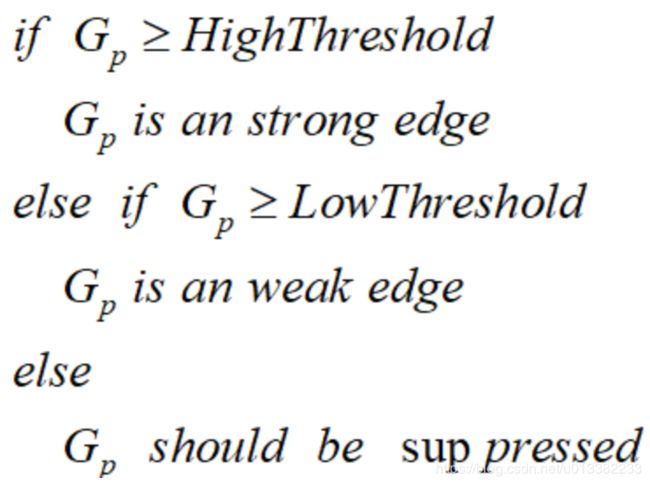
严格的说,梯度计算需要求导数。但是图像梯度的计算,是通过计算像素值的差得到梯度的近似值。图像梯度表示的是图像变化的速度,反映了图像的边缘信息。边缘是像素值快速变化的地方。所以对于图像的边缘部分,其灰度值变化较大,梯度值也较大;对于图像中较平滑的部分,其灰度值变化较小,梯度值也较小。为了检测边缘,我们需要检测图像中的不连续性,可以使用图像梯度来检测不连续性。但是,图像梯度也会受到噪声的影响,因此建议
- 【春到东北外一首】
蒙来客
图片发自App【春到东北】街区湖岸柳绿,山坡桃花盛开。己亥清明刚过,春天已经到来。图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App【卜算子•咏桃】东北四月初,方见桃花俏。春来盼君半季去,才解相思绕。娉婷天仙女,旖旎柔美姣。粉似香腮白若肤,朵朵舍羞笑。图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App图片发自App
- OpenCV-轮廓检测
红米煮粥
计算机视觉opencv图像处理
文章目录一、简介1.意义2.具体步骤二、代码实现三、总结一、简介1.意义在OpenCV中,轮廓检测是图像处理中一个非常重要的环节,它允许我们识别图像中的形状。这个过程通常涉及几个步骤:读取图像、转换为灰度图、应用阈值处理(或边缘检测)以获取二值图像、然后使用cv2.findContours()函数查找轮廓。2.具体步骤图像预处理:首先,对原始图像进行预处理,以便更容易地检测轮廓。这通常包括转换为灰
- 【Pytorch】cumsum的实现逻辑
栏杆拍遍看吴钩
pytorchpytorch人工智能python
本文只记录cumsum的实现逻辑的CUDA部分,也即底层调用了CUDA的什么实现算子。voidlaunch_cumsum_cuda_kernel(constTensorBase&result,constTensorBase&self,int64_tdim){AT_DISPATCH_ALL_TYPES_AND_COMPLEX_AND2(ScalarType::Half,ScalarType::BFl
- fpga图像处理实战-边缘检测 (Roberts算子)
梦梦梦梦子~
OV5640+图像处理图像处理计算机视觉人工智能
Roberts算子Roberts算子是一种用于边缘检测的算子,主要用于图像处理中检测图像的边缘。它是最早的边缘检测算法之一,以其计算简单、速度快而著称。Roberts算子通过计算图像像素在对角方向的梯度来检测边缘,从而突出图像中灰度变化最剧烈的部分。原理Roberts算子通过对图像应用两个2x2的卷积核(也称为掩模或滤波器)来计算图像在水平和垂直方向上的梯度。假设原始图像的像素值为I(x,y),则
- 【PGCCC】探秘PostgreSQL执行算子:幕后英雄的全景解析
PGCCC-PostgeSQL培训认证
postgresql大数据人工智能
在数据库的世界中,执行算子是支撑SQL查询的幕后英雄。它们负责将复杂的查询语句转换为数据库可以理解并执行的操作序列。尽管这些算子在查询过程中悄无声息地工作,但它们的效率和性能直接影响着查询的执行时间。本文将带领大家深入了解PostgreSQL中执行算子的类别及其特性,并通过实际案例展示它们的原理和实现方式。执行算子的类别与特性在PostgreSQL中,执行算子通常分为以下几类:顺序扫描(Seque
- Apache Flink 替换 Spark Stream的架构与实践( bilibili 案例解读)_streamsparkflink加载udf(1)
2401_84165953
程序员flinkspark架构
2.开发架构设计(1)开发架构图:如下图左侧所示。最上层是Saber-Streamer,主要进行作业提交以及API管理。下一层是BSQL层,主要进行SQL的扩展和解析,包括自定义算子和个性算子。再下层是运行时态,下面是引擎层。运行时态主要管理引擎层作业的上下层。bilibili早期使用的引擎是SparkStreaming,后期扩展了Flink,在开发架构中预留了一部分引擎层的扩展。最下层是状态存储
- 学习Halcon可以从以下几个方面入手
视觉人机器视觉
机器视觉Halcon大总结学习人工智能深度学习图像处理计算机视觉视觉检测
基础理论学习:了解Halcon的基本概念、架构和主要技术,包括图像处理、机器视觉、深度学习等方面的知识。官方文档和教程:阅读Halcon的官方文档和教程,这是学习Halcon最直接、最权威的途径。官方文档详细介绍了Halcon的各种功能和算子,是学习Halcon不可或缺的资源。实践项目:通过参与实际项目来巩固所学知识,提升实践能力。可以从简单的项目开始,
- SparkStreaming业务逻辑处理的一些高级算子
看见我的小熊没
sparkStreamingscalasparkbigdatascala
1、reduceByKey reduceByKey是按key进行计算,操作的数据是每个批次内的数据(一个采集周期),不能跨批次计算。如果需要实现对历史数据的跨批次统计累加,则需要使用updateStateByKey算子或者mapWithState算子。packagecom.sparkscala.streamingimportorg.apache.log4j.{Level,Logger}impor
- 【ITK库学习】使用itk库进行图像滤波ImageFilter:模糊降噪
leafpipi
ITK学习图像处理c++算法
目录1、itkDiscreteGaussianImageFilter离散高斯2、itkBinomialBlurImageFilter二项式模糊3、itkSmoothingRecursiveGaussianImageFilter图像模糊可以削弱图像频谱的高频部门1、itkDiscreteGaussianImageFilter离散高斯该类通过图像与离散高斯算子(内核)的可分离卷积来模糊图像。如果Set
- Ascend C算子开发——学习笔记
hustsurvivor
学习笔记
目标:编写代码,在香橙派上实现Sinh运算,在SinhCustom目录下编写kernel侧代码和host侧代码,完成调用测试,考取中级微认证证书。开发流程:算子分析:分析算子的数学表达式、输入、输出以及计算逻辑的实现,明确需要调用的AscendC接口。核函数定义:定义AscendC算子入口函数。根据矢量变成范式实现算子类:完成核函数的内部实现。其中:CopyIn:将GlobalMemory上的输入
- 昇腾Ascend C算子开发学习笔记
回到唐朝当王爷
c语言学习笔记
2024年7月18日华为上研院培训笔记记录,感觉老师讲的还是很不错的昇腾AscendC算子开发学习笔记昇腾处理器的常用算子库核心融合算子库:核心融合算子库是华为昇腾AI处理器提供的基本算子库,包含了各种常用的深度学习算子,可以高效地执行各种神经网络计算任务。该库的设计旨在充分发挥昇腾AI芯片的计算能力,优化计算性能和资源利用率。FlashAttention类,MOEFFN类NN算子库:NN(Neu
- Ascend C算子学习笔记
张栗瑞-22373425
github
2024年鲲鹏&昇腾创新大赛集训营todo:回答问题链接:https://www.hiascend.com/forum/thread-0265155791127017253-1-1.html?fid=0163125572293226003提交笔记链接:昇腾论坛香橙派实验手册:昇腾论坛AscendC算子中级认证考试链接:微认证异构计算架构CANN背景AI创新在加速:从“预测推断”向“内容生成”延展:
- opencv学习:形态学操作和边缘检测算子
夜清寒风
opencv学习人工智能算法计算机视觉
cv2.morphologyEx()是OpenCV库中的一个函数,用于执行更复杂的形态学操作。这个函数可以执行开运算、闭运算、梯度运算、膨胀、腐蚀以及顶帽和黑帽转换等。这些操作通常用于图像预处理,如去除噪声、平滑边界、突出特征等。dst=cv2.morphologyEx(src,op,kernel[,dst[,anchor[,iterations[,borderType[,borderValue]
- 根据子网前缀的长度计算ip范围
软考鸭
软考tcp/ip网络服务器
要根据子网前缀的长度计算IP范围,我们需要了解子网前缀长度与子网掩码之间的关系,以及如何通过子网掩码来确定IP地址的网络部分和主机部分。以下是根据子网前缀长度计算IP范围的步骤:确定子网前缀长度:子网前缀长度(也称为CIDR前缀长度)表示在IP地址中,网络部分占据的位数。例如,/24表示网络部分占据前24位。计算子网掩码:根据子网前缀长度,我们可以计算出子网掩码。子网掩码是一串连续的1,后跟一串连
- Flink详解系列之八--Checkpoint和Savepoint
王吉吉real
一、Checkpoint获取分布式数据流和算子状态的一致性快照是Flink容错机制的核心,这些快照在Flink作业恢复时作为一致性检查点存在。1.1原理1.1.1BarriersBarrier是由流数据源(streamsource)注入数据流中,并作为数据流的一部分与数据记录一起往下游流动。Barriers将流里的记录分隔为一段一段的记录集,每一个记录集都对应一个快照。每个Barrier会携带一个
- MATLAB图像去噪和边缘检测
柯咪侠
笔记matlab图像处理
本文涉及分别使用均值滤波器和中值滤波器来除去高斯噪声、椒盐噪声以及sobel边缘检测。程序://a=imread('C:\图片\dog.jpg');I=rgb2gray(a);%将彩色图变成灰色图subplot(3,3,1);imshow(I);xlabel('原始图像');b=imnoise(I,'salt&pepper',0.01);%添加椒盐噪声subplot(3,3,2<
- 卜算子.我住长江头——李之仪
幻想会飞的鱼
我住长江头,君住长江尾。日日思君不见君,共饮长江水。此水几时休,此恨何时已。只愿君心似我心,定不负相思意。译:我住在长江源头,君住在长江之尾。天天想念你总是见不到你,却共同饮着长江之水。悠悠不尽的江水什么时候枯竭,别离的苦恨,什么时候消止。只愿你的心,如我的心相守不移,就不会辜负了我一番痴恋情意。
- 图像处理 -- 图像清晰度测量方法
sz66cm
图像处理计算机视觉
图像清晰度测量方法拉普拉斯算子(LaplacianOperator)拉普拉斯算子是一种二阶导数算子,用于检测图像的边缘。清晰的图像通常具有更多且更明显的边缘。边缘检测(EdgeDetection)常用的边缘检测算法包括Sobel、Prewitt和Canny边缘检测器。通过计算边缘的数量和强度,可以间接判断图像的清晰度。方差(Variance)方差用于衡量图像灰度值的分布情况。图像中灰度值的方差越大
- 第二十五章 战启
青者言墨
第二十五章战启“为什么?”“一是因为天族在更换躯体之后需要一定的时间适应,我不确定会有多久,那个状态的他已经不再适合成为执剑人了,另一个原因便是你。”“我?”越无忧想到了噬魂花以及千年前他在鬼渊中练成噬魂之力的哪些日子,所以当时不止有娘亲留下的术力保护他还有鬼算子。“我想看看在我引导下的你会不会去鬼渊,我们联手有没有机会让噬魂花开。”结果他们失败了,魔君越无忧出现了。至于后面的事他们都知晓了,在他
- Halcon提取彩色多通道图像的亚像素边缘edges_color_sub_pix算子
看海听风心情棒
计算机视觉图像处理人工智能
Halcon提取彩色多通道图像的亚像素边缘edges_color_sub_pix算子如要要提取彩色多通道图像的亚像素边缘,可以使用edges_colorsubpix算子。该算子与edges_sub_pix算子的参数十分相似,但又有所区别。首先从名称上看,edgescolorsubpix算子多了一个color,表示它接受彩色多通道图像的输入,它使用Canny等滤波器提取亚像素精度的彩色边缘。另一个区
- Hadoop(一)
朱辉辉33
hadooplinux
今天在诺基亚第一天开始培训大数据,因为之前没接触过Linux,所以这次一起学了,任务量还是蛮大的。
首先下载安装了Xshell软件,然后公司给了账号密码连接上了河南郑州那边的服务器,接下来开始按照给的资料学习,全英文的,头也不讲解,说锻炼我们的学习能力,然后就开始跌跌撞撞的自学。这里写部分已经运行成功的代码吧.
在hdfs下,运行hadoop fs -mkdir /u
- maven An error occurred while filtering resources
blackproof
maven报错
转:http://stackoverflow.com/questions/18145774/eclipse-an-error-occurred-while-filtering-resources
maven报错:
maven An error occurred while filtering resources
Maven -> Update Proje
- jdk常用故障排查命令
daysinsun
jvm
linux下常见定位命令:
1、jps 输出Java进程
-q 只输出进程ID的名称,省略主类的名称;
-m 输出进程启动时传递给main函数的参数;
&nb
- java 位移运算与乘法运算
周凡杨
java位移运算乘法
对于 JAVA 编程中,适当的采用位移运算,会减少代码的运行时间,提高项目的运行效率。这个可以从一道面试题说起:
问题:
用最有效率的方法算出2 乘以8 等於几?”
答案:2 << 3
由此就引发了我的思考,为什么位移运算会比乘法运算更快呢?其实简单的想想,计算机的内存是用由 0 和 1 组成的二
- java中的枚举(enmu)
g21121
java
从jdk1.5开始,java增加了enum(枚举)这个类型,但是大家在平时运用中还是比较少用到枚举的,而且很多人和我一样对枚举一知半解,下面就跟大家一起学习下enmu枚举。先看一个最简单的枚举类型,一个返回类型的枚举:
public enum ResultType {
/**
* 成功
*/
SUCCESS,
/**
* 失败
*/
FAIL,
- MQ初级学习
510888780
activemq
1.下载ActiveMQ
去官方网站下载:http://activemq.apache.org/
2.运行ActiveMQ
解压缩apache-activemq-5.9.0-bin.zip到C盘,然后双击apache-activemq-5.9.0-\bin\activemq-admin.bat运行ActiveMQ程序。
启动ActiveMQ以后,登陆:http://localhos
- Spring_Transactional_Propagation
布衣凌宇
springtransactional
//事务传播属性
@Transactional(propagation=Propagation.REQUIRED)//如果有事务,那么加入事务,没有的话新创建一个
@Transactional(propagation=Propagation.NOT_SUPPORTED)//这个方法不开启事务
@Transactional(propagation=Propagation.REQUIREDS_N
- 我的spring学习笔记12-idref与ref的区别
aijuans
spring
idref用来将容器内其他bean的id传给<constructor-arg>/<property>元素,同时提供错误验证功能。例如:
<bean id ="theTargetBean" class="..." />
<bean id ="theClientBean" class=&quo
- Jqplot之折线图
antlove
jsjqueryWebtimeseriesjqplot
timeseriesChart.html
<script type="text/javascript" src="jslib/jquery.min.js"></script>
<script type="text/javascript" src="jslib/excanvas.min.js&
- JDBC中事务处理应用
百合不是茶
javaJDBC编程事务控制语句
解释事务的概念; 事务控制是sql语句中的核心之一;事务控制的作用就是保证数据的正常执行与异常之后可以恢复
事务常用命令:
Commit提交
- [转]ConcurrentHashMap Collections.synchronizedMap和Hashtable讨论
bijian1013
java多线程线程安全HashMap
在Java类库中出现的第一个关联的集合类是Hashtable,它是JDK1.0的一部分。 Hashtable提供了一种易于使用的、线程安全的、关联的map功能,这当然也是方便的。然而,线程安全性是凭代价换来的――Hashtable的所有方法都是同步的。此时,无竞争的同步会导致可观的性能代价。Hashtable的后继者HashMap是作为JDK1.2中的集合框架的一部分出现的,它通过提供一个不同步的
- ng-if与ng-show、ng-hide指令的区别和注意事项
bijian1013
JavaScriptAngularJS
angularJS中的ng-show、ng-hide、ng-if指令都可以用来控制dom元素的显示或隐藏。ng-show和ng-hide根据所给表达式的值来显示或隐藏HTML元素。当赋值给ng-show指令的值为false时元素会被隐藏,值为true时元素会显示。ng-hide功能类似,使用方式相反。元素的显示或
- 【持久化框架MyBatis3七】MyBatis3定义typeHandler
bit1129
TypeHandler
什么是typeHandler?
typeHandler用于将某个类型的数据映射到表的某一列上,以完成MyBatis列跟某个属性的映射
内置typeHandler
MyBatis内置了很多typeHandler,这写typeHandler通过org.apache.ibatis.type.TypeHandlerRegistry进行注册,比如对于日期型数据的typeHandler,
- 上传下载文件rz,sz命令
bitcarter
linux命令rz
刚开始使用rz上传和sz下载命令:
因为我们是通过secureCRT终端工具进行使用的所以会有上传下载这样的需求:
我遇到的问题:
sz下载A文件10M左右,没有问题
但是将这个文件A再传到另一天服务器上时就出现传不上去,甚至出现乱码,死掉现象,具体问题
解决方法:
上传命令改为;rz -ybe
下载命令改为:sz -be filename
如果还是有问题:
那就是文
- 通过ngx-lua来统计nginx上的虚拟主机性能数据
ronin47
ngx-lua 统计 解禁ip
介绍
以前我们为nginx做统计,都是通过对日志的分析来完成.比较麻烦,现在基于ngx_lua插件,开发了实时统计站点状态的脚本,解放生产力.项目主页: https://github.com/skyeydemon/ngx-lua-stats 功能
支持分不同虚拟主机统计, 同一个虚拟主机下可以分不同的location统计.
可以统计与query-times request-time
- java-68-把数组排成最小的数。一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的。例如输入数组{32, 321},则输出32132
bylijinnan
java
import java.util.Arrays;
import java.util.Comparator;
public class MinNumFromIntArray {
/**
* Q68输入一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的一个。
* 例如输入数组{32, 321},则输出这两个能排成的最小数字32132。请给出解决问题
- Oracle基本操作
ccii
Oracle SQL总结Oracle SQL语法Oracle基本操作Oracle SQL
一、表操作
1. 常用数据类型
NUMBER(p,s):可变长度的数字。p表示整数加小数的最大位数,s为最大小数位数。支持最大精度为38位
NVARCHAR2(size):变长字符串,最大长度为4000字节(以字符数为单位)
VARCHAR2(size):变长字符串,最大长度为4000字节(以字节数为单位)
CHAR(size):定长字符串,最大长度为2000字节,最小为1字节,默认
- [强人工智能]实现强人工智能的路线图
comsci
人工智能
1:创建一个用于记录拓扑网络连接的矩阵数据表
2:自动构造或者人工复制一个包含10万个连接(1000*1000)的流程图
3:将这个流程图导入到矩阵数据表中
4:在矩阵的每个有意义的节点中嵌入一段简单的
- 给Tomcat,Apache配置gzip压缩(HTTP压缩)功能
cwqcwqmax9
apache
背景:
HTTP 压缩可以大大提高浏览网站的速度,它的原理是,在客户端请求网页后,从服务器端将网页文件压缩,再下载到客户端,由客户端的浏览器负责解压缩并浏览。相对于普通的浏览过程HTML ,CSS,Javascript , Text ,它可以节省40%左右的流量。更为重要的是,它可以对动态生成的,包括CGI、PHP , JSP , ASP , Servlet,SHTML等输出的网页也能进行压缩,
- SpringMVC and Struts2
dashuaifu
struts2springMVC
SpringMVC VS Struts2
1:
spring3开发效率高于struts
2:
spring3 mvc可以认为已经100%零配置
3:
struts2是类级别的拦截, 一个类对应一个request上下文,
springmvc是方法级别的拦截,一个方法对应一个request上下文,而方法同时又跟一个url对应
所以说从架构本身上 spring3 mvc就容易实现r
- windows常用命令行命令
dcj3sjt126com
windowscmdcommand
在windows系统中,点击开始-运行,可以直接输入命令行,快速打开一些原本需要多次点击图标才能打开的界面,如常用的输入cmd打开dos命令行,输入taskmgr打开任务管理器。此处列出了网上搜集到的一些常用命令。winver 检查windows版本 wmimgmt.msc 打开windows管理体系结构(wmi) wupdmgr windows更新程序 wscrip
- 再看知名应用背后的第三方开源项目
dcj3sjt126com
ios
知名应用程序的设计和技术一直都是开发者需要学习的,同样这些应用所使用的开源框架也是不可忽视的一部分。此前《
iOS第三方开源库的吐槽和备忘》中作者ibireme列举了国内多款知名应用所使用的开源框架,并对其中一些框架进行了分析,同样国外开发者
@iOSCowboy也在博客中给我们列出了国外多款知名应用使用的开源框架。另外txx's blog中详细介绍了
Facebook Paper使用的第三
- Objective-c单例模式的正确写法
jsntghf
单例iosiPhone
一般情况下,可能我们写的单例模式是这样的:
#import <Foundation/Foundation.h>
@interface Downloader : NSObject
+ (instancetype)sharedDownloader;
@end
#import "Downloader.h"
@implementation
- jquery easyui datagrid 加载成功,选中某一行
hae
jqueryeasyuidatagrid数据加载
1.首先你需要设置datagrid的onLoadSuccess
$(
'#dg'
).datagrid({onLoadSuccess :
function
(data){
$(
'#dg'
).datagrid(
'selectRow'
,3);
}});
2.onL
- jQuery用户数字打分评价效果
ini
JavaScripthtmljqueryWebcss
效果体验:http://hovertree.com/texiao/jquery/5.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>jQuery用户数字打分评分代码 - HoverTree</
- mybatis的paramType
kerryg
DAOsql
MyBatis传多个参数:
1、采用#{0},#{1}获得参数:
Dao层函数方法:
public User selectUser(String name,String area);
对应的Mapper.xml
<select id="selectUser" result
- centos 7安装mysql5.5
MrLee23
centos
首先centos7 已经不支持mysql,因为收费了你懂得,所以内部集成了mariadb,而安装mysql的话会和mariadb的文件冲突,所以需要先卸载掉mariadb,以下为卸载mariadb,安装mysql的步骤。
#列出所有被安装的rpm package rpm -qa | grep mariadb
#卸载
rpm -e mariadb-libs-5.
- 利用thrift来实现消息群发
qifeifei
thrift
Thrift项目一般用来做内部项目接偶用的,还有能跨不同语言的功能,非常方便,一般前端系统和后台server线上都是3个节点,然后前端通过获取client来访问后台server,那么如果是多太server,就是有一个负载均衡的方法,然后最后访问其中一个节点。那么换个思路,能不能发送给所有节点的server呢,如果能就
- 实现一个sizeof获取Java对象大小
teasp
javaHotSpot内存对象大小sizeof
由于Java的设计者不想让程序员管理和了解内存的使用,我们想要知道一个对象在内存中的大小变得比较困难了。本文提供了可以获取对象的大小的方法,但是由于各个虚拟机在内存使用上可能存在不同,因此该方法不能在各虚拟机上都适用,而是仅在hotspot 32位虚拟机上,或者其它内存管理方式与hotspot 32位虚拟机相同的虚拟机上 适用。
- SVN错误及处理
xiangqian0505
SVN提交文件时服务器强行关闭
在SVN服务控制台打开资源库“SVN无法读取current” ---摘自网络 写道 SVN无法读取current修复方法 Can't read file : End of file found
文件:repository/db/txn_current、repository/db/current
其中current记录当前最新版本号,txn_current记录版本库中版本