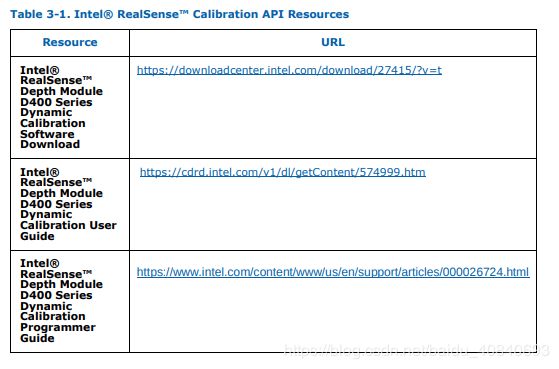
英特尔realsense相机标定
https://store.intelrealsense.com/buy-intel-realsense-d400-cameras-calibration-target.html
https://www.intel.com/content/dam/support/us/en/documents/emerging-technologies/intel-realsense-technology/RealSense_D400%20_Custom_Calib_Paper.pdf

我看代码可以自己直接输出内参,相机RT,应该是出厂标定好的
## License: Apache 2.0. See LICENSE file in root directory.
## Copyright(c) 2015-2017 Intel Corporation. All Rights Reserved.
###############################################
## Open CV and Numpy integration ##
###############################################
import pyrealsense2 as rs
import numpy as np
import cv2
"""
Returns R, T transform from src to dst
"""
def get_extrinsics(src, dst):
extrinsics = src.get_extrinsics_to(dst)
R = np.reshape(extrinsics.rotation, [3,3]).T
T = np.array(extrinsics.translation)
return (R, T)
"""
Returns a camera matrix K from librealsense intrinsics
"""
def camera_matrix(intrinsics):
return np.array([[intrinsics.fx, 0, intrinsics.ppx],
[ 0, intrinsics.fy, intrinsics.ppy],
[ 0, 0, 1]])
'''
Intel RealSense SDK 2.0/tools/rs-enumerate-devices
'''
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
#1920, 1080
#1280, 720
config.enable_stream(rs.stream.color, 1920, 1080, rs.format.bgr8, 30)
config.enable_stream(rs.stream.infrared, 1, 640, 480, rs.format.y8, 30);
config.enable_stream(rs.stream.infrared, 2, 640, 480, rs.format.y8, 30);
'''
Intel RealSense D435i
https://dev.intelrealsense.com/docs/opencv-wrapper
DepthDepth
Technology:
Active IR Stereo
Depth Field of View (FOV):
87°±3° x 58°±1° x 95°±3°Minimum Depth Distance (Min-Z):
0.105 m
Depth Output Resolution & Frame Rate:
Up to 1280 x 720 active stereo depth resolution. Up to 90 fps.
RGBRGB
Sensor Resolution & Frame Rate):
1920 x 1080
RGB Frame Rate:
30 fps
RGB Sensor FOV (H x V x D):
69.4° x 42.5° x 77° (+/- 3°)
'''
# Start streaming
pipeline.start(config)
# Retreive the stream and intrinsic properties for both cameras
profiles = pipeline.get_active_profile()
streams = {"left": profiles.get_stream(rs.stream.infrared, 1).as_video_stream_profile(),
"right": profiles.get_stream(rs.stream.infrared, 2).as_video_stream_profile()}
infrared_intrinsics = {"left": streams["left"].get_intrinsics(),
"right": streams["right"].get_intrinsics()}
# Get the relative extrinsics between the left and right camera
(R, T) = get_extrinsics(streams["left"], streams["right"])
depth_profile = rs.video_stream_profile(profiles.get_stream(rs.stream.depth))
depth_intrinsics = depth_profile.get_intrinsics()
color_profile = rs.video_stream_profile(profiles.get_stream(rs.stream.color))
color_intrinsics = color_profile.get_intrinsics()
(R1, T1) = get_extrinsics(streams["left"], color_profile)
print("infrared_intrinsics_left\n", streams["left"].get_intrinsics())
print("infrared_intrinsics_right\n", streams["right"].get_intrinsics())
print("color_intrinsics\n", color_intrinsics)
print("depth_intrinsics\n", depth_intrinsics)
print("Rt-irLeft2irRight\n", get_extrinsics(streams["left"], streams["right"]))
print("Rt-irLeft2color\n", get_extrinsics(streams["left"], color_profile))
print("Rt-irRight2color\n", get_extrinsics(streams["right"], color_profile))
print("Rt-dep2color\n", get_extrinsics(depth_profile, color_profile))
print("Rt-color2dep\n", get_extrinsics(color_profile, depth_profile))
print("Rt-color2irLeft\n", get_extrinsics(color_profile, streams["left"]))
print("Rt-color2irRight\n", get_extrinsics(color_profile, streams["right"]))
#畸变系数为0
#解释:
# https://github.com/IntelRealSense/librealsense/issues/1430
# https://github.com/IntelRealSense/librealsense/issues/432
# https://github.com/IntelRealSense/librealsense/issues/368
#a = cv2.imread("./image/image_depth_1.png", -1)
subnameRGB = "image_color_"
subnameDEP = "image_depth_"
subnameIR1 = "image_infrared_left_"
subnameIR2 = "image_infrared_right_"
color_endname = ".jpg"
depth_endname = ".png"
num = 0
try:
while True:
# Wait for a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
ir_frame_left = frames.get_infrared_frame(1)
ir_frame_right = frames.get_infrared_frame(2)
if not depth_frame or not color_frame or not ir_frame_left or not ir_frame_right:
continue
# Convert images to numpy arrays
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
ir_left_image = np.asanyarray(ir_frame_left.get_data())
ir_right_image = np.asanyarray(ir_frame_right.get_data())
cv2.equalizeHist(ir_left_image, ir_left_image)
ir_colormap = cv2.applyColorMap(ir_left_image, cv2.COLORMAP_JET)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)
resize_color = None
h,w = ir_colormap.shape[:2]
resize_color = cv2.resize(color_image, (w,h), resize_color)
images = np.hstack((ir_colormap, resize_color))
cv2.imshow('video test', images)
if cv2.waitKey(1) & 0xFF == ord('s'):
num += 1
cv2.imwrite('./image/'+ subnameRGB + str(num) + depth_endname, color_image)
#depth_image.astype(np.uint16)
cv2.imwrite('./image/'+ subnameDEP + str(num) + depth_endname, depth_image)
cv2.imwrite('./image/'+ subnameIR1 + str(num) + depth_endname, ir_left_image)
cv2.imwrite('./image/'+ subnameIR2 + str(num) + depth_endname, ir_right_image)
else:
continue
finally:
# Stop streaming
pipeline.stop()infrared_intrinsics_left
width: 640, height: 480, ppx: 314.846, ppy: 238.702, fx: 384.956, fy: 384.956, model: 4, coeffs: [0, 0, 0, 0, 0]
infrared_intrinsics_right
width: 640, height: 480, ppx: 314.846, ppy: 238.702, fx: 384.956, fy: 384.956, model: 4, coeffs: [0, 0, 0, 0, 0]
color_intrinsics
width: 1920, height: 1080, ppx: 967.033, ppy: 539.492, fx: 1389.77, fy: 1391.03, model: 2, coeffs: [0, 0, 0, 0, 0]
depth_intrinsics
width: 640, height: 480, ppx: 314.846, ppy: 238.702, fx: 384.956, fy: 384.956, model: 4, coeffs: [0, 0, 0, 0, 0]
Rt-irLeft2irRight
(array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]), array([-0.04994006, 0. , 0. ]))
Rt-irLeft2color
(array([[ 0.99977833, -0.0194878 , 0.00796849],
[ 0.01946379, 0.99980581, 0.00307983],
[-0.00802696, -0.00292405, 0.99996352]]), array([1.47467265e-02, 4.92615509e-04, 4.66895290e-05]))
Rt-irRight2color
(array([[ 0.99977833, -0.0194878 , 0.00796849],
[ 0.01946379, 0.99980581, 0.00307983],
[-0.00802696, -0.00292405, 0.99996352]]), array([ 0.06467572, 0.00146464, -0.00035418]))
Rt-dep2color
(array([[ 0.99977833, -0.0194878 , 0.00796849],
[ 0.01946379, 0.99980581, 0.00307983],
[-0.00802696, -0.00292405, 0.99996352]]), array([1.47467265e-02, 4.92615509e-04, 4.66895290e-05]))
Rt-color2dep
(array([[ 0.99977833, 0.01946379, -0.00802696],
[-0.0194878 , 0.99980581, -0.00292405],
[ 0.00796849, 0.00307983, 0.99996352]]), array([-0.01475267, -0.000205 , -0.00016571]))
Rt-color2irLeft
(array([[ 0.99977833, 0.01946379, -0.00802696],
[-0.0194878 , 0.99980581, -0.00292405],
[ 0.00796849, 0.00307983, 0.99996352]]), array([-0.01475267, -0.000205 , -0.00016571]))
Rt-color2irRight
(array([[ 0.99977833, 0.01946379, -0.00802696],
[-0.0194878 , 0.99980581, -0.00292405],
[ 0.00796849, 0.00307983, 0.99996352]]), array([-0.06469274, -0.000205 , -0.00016571]))