树莓派4B开机配置指南_利用官方模型实现人脸识别
上一篇:树莓派4B+配件+Intel神经棒2代购机指南
下一篇:树莓派4B远程控制
目录
一、树莓派第一次开机
二、系统设置
2.1、方法一:图形界面设置
2.2、方法二:命令行设置
2.2.1、Change User Password
2.2.2、Localisation Options
2.2.3、Interfacing Options
2.2.4、Advanced Options
2.3、换源
2.3.1、给Raspbian的包管理器apt-get换源
2.3.2、给Python的第三方模块安装工具pip换源
2.3.2.1、方法一:一行命令换源
2.3.2.2、方法二:配置换源脚本
2.3.3、安装中文字体及输入法
2.3.4、升级所有安装的软件
2.3.5、修改默认python路径/版本
三、Intel Neural Compute Stick 2 配置
3.1、安装OpenVino
3.1.1、下载最新的OpenVino安装包
3.1.2、安装cmake包
3.1.3、配置路径环境
3.2、添加USB规则
四、人脸识别demo测试验证安装是否成功
4.1、命令行验证
4.1.1、编译object_detection_sample_ssd模型
4.1.2、下载网络和权重文件
4.1.3、人脸图片测试
4.2、opencv + python api调用方法验证
4.2.1、编写face_detection.py文件
4.2.2、人脸图片验证
五、参考资料
一丶树莓派第一次开机
1.连接电源,键盘,鼠标,显示器,开机启动,界面上出现树莓派logo说明启动成功

2.一路next,根据实际情况设置国家(China)、城市(Shanghai)、语言(简体中文)、密码(此密码远程连接时使用)等
3.继续next,若开机时未连接网线,则系统会自动搜索wifi,点击Next即可连接,或者skip跳过
4.更新系统,看心情选择next或者skip,没影响
5.设置完成之后重启(重启后界面工具栏变为中文)
二丶系统设置
系统设置有两种方法2.1、方法一:图形界面设置
PI 4B系统可选择点击界面左上角的树莓派小图标
–>首选项
–>Raspberry Pi Configuration

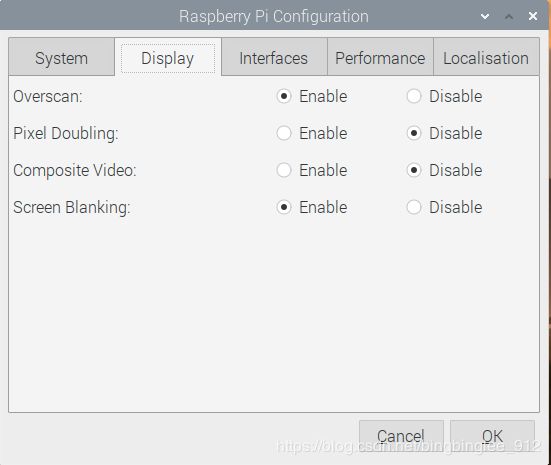



依图所示设置即可
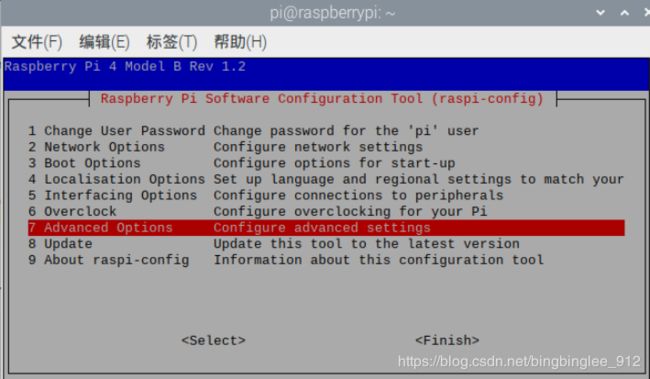
2.2、方法二:命令行设置
打开树莓派命令行界面输入命令,进入树莓派配置界面。sudo raspi-config
键盘↑↓←→键控制移动
2.2.1、Change User Password
按照里面的要求修改成自己的密码即可。默认用户名为pi,默认密码为raspberry(第一次开机已设置过的无需再次修改)。这个密码会用于远程ssh登陆、VNC远程桌面及需要管理员root权限时输入。
密码在第一次开机时应该已经设置过,无需再次修改。
2.2.2、Localisation Options
位置信息在第一次开机时应该已经设置过,无需再次修改2.2.3、Interfacing Options
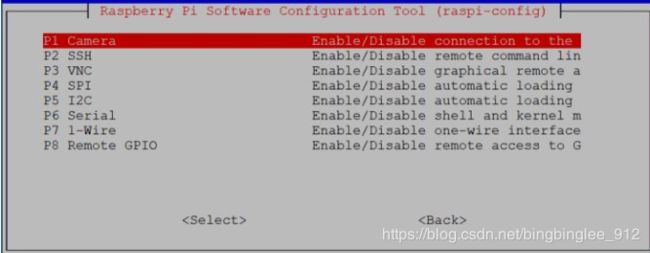
打开Camera、SSH、VNC、Serial、Remote GPIO,这几个功能都是我们在以后会用到的功能。
- Camera:摄像头
- SSH:ssh远程通信与登陆
- VNC:VNC远程桌面登陆
- Serial:串口控制
- Remote GPIO:远程GPIO引脚控制
2.2.4、Advanced Options
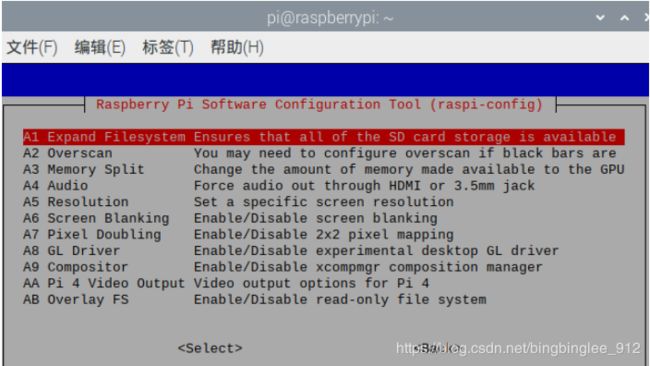
- 选择Expand Filesystem,将根目录扩展到这个SD卡,充分利用SD卡的存储空间
- 选择Overscan,在整个屏幕上显示
- 选择Audio,选择Force 3.5mm(‘headphone’ jack),树莓派的声音会从耳机孔输出
- 选择Resolution,选择默认设置,自动根据显示屏调整分辨率
其他项无需修改,保持默认即可,设置完成后返回选择Finish,会跳出对话框问是否重新启动,可以直接回车确定重启,也可以等下次启动时候生效。
2.3、换源
树莓派默认的下载源是国外的源,每次下载都要远隔重洋获取资源,速度自然是龟速,为了解决这个问题,需要更换国内源
国内比较常用的源资源为清华大学开源软件镜像站,此外还有阿里云、同济大学、重庆大学、中科大、豆瓣、淘宝等其他镜像站
2.3.1、给Raspbian的包管理器apt-get换源
在树莓派的命令行界面输入sudo nano /etc/apt/sources.list

注销掉第一行,并在文末加入
deb http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpi
deb-src http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpi

按ctrl + O键写入文件,然后按Enter,再按Ctrl + X退出

接着执行:
sudo nano /etc/apt/sources.list.d/raspi.list
注释掉第一行,在文末加上:

deb http://mirror.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
deb-src http://mirror.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
保存,退出
再输入以下命令更新到阿里云镜像源最新的软件列表。
sudo apt-get update

以上步骤实现了Respbian的包管理器apt-get换源到阿里云软件镜像站,并更新了软件列表,今后在树莓派命令行中执行sudo apt-get install 软件名 时便会自动从阿里云开源软件镜像站高速下载。
2.3.2、给Python的第三方模块安装工具pip换源
2.3.2.1、方法一:一行命令换源
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple

2.3.2.2、方法二:配置换源脚本
sudo mkdir ~/.pip
cd .pip
sudo nano pip.conf
在打开的文件中输入以下内容:
[global]
timeout = 10
index-url = http://mirrors.aliyun.com/pypi/simple/
extra-index-url= http://pypi.douban.com/simple/
[install]
trusted-host=
mirrors.aliyun.com
pypi.douban.com
按ctrl + O键写入文件,然后按Enter,再按Ctrl + X退出
2.3.3、安装中文字体及输入法
sudo apt-get install fonts-wqy-zenhei

安装中文输入法fcitx及Google拼音输入法
sudo apt-get install fcitx fcitx-googlepinyin fcitx-module-cloudpinyin fcitx-sunpinyin
在跳出的对话框中输入y和回车,确定下载安装,需要90MB存储空间。
安装成功之后,会在下一次重启时生效。
可以使用ctrl+空格切换为中文输入法。
2.3.4、升级所有安装的软件
sudo apt-get upgrade
若由于网络问题出现报错,可执行
sudo apt-get upgrade --fix-missing
2.3.5、修改默认python路径/版本
树莓派4B默认安装了Python2以及Python3,首先查看python版本:
python --version
查看安装的python路径:
whereis python
查看python默认链接的路径:
which python
删除原来python链接文件:
sudo rm /usr/bin/python
建立新的python链接指向:
sudo ln -s /usr/bin/python3.7 /usr/bin/python
把路径/usr/bin加入环境变量中:
PATH=/usr/bin:$PATH
关闭命令行重新打开查看python版本
三、Intel Neural Compute Stick 2 配置
3.1、安装OpenVino
OpenVino
发行说明
软件要求:
A Linux build environment needs these components:
- OpenCV 3.4 or higher
- GNU Compiler Collection (GCC)* 3.4 or higher
- CMake* 2.8 or higher
- Python* 3.5 or higher
3.1.1、下载最新的OpenVino安装包
最新安装包:l_openvino_toolkit_runtime_raspbian_p_2019.3.334.tgz
OpenVINO官网:Install OpenVINO™ toolkit for Raspbian* OS
将安装包放入/home/pi/Downloads/文件夹下,并解压:
tar -xf l_openvino_toolkit_runtime_raspbian_p_2019.3.334.tgz
3.1.2、安装cmake
sudo apt install cmake
3.1.3、配置路径环境
执行以下命令,会自动对setupvars.sh文件做修改
sed -i "s|
将setupvars.sh加入永久配置环境
nona /home/pi/.bashrc
在最后一行加入:
source /home/pi/Downloads/l_openvino_toolkit_runtime_raspbian_p_2019.3.334/bin/setupvars.sh
保存,退出,并再打开一个终端,若出现:
[setupvars.sh] OpenVINO environment initialized
则表示成功
3.2、添加USB规则
将当前的Linux用户添加到该users组
sudo usermod -a -G users "$(whoami)"
接下来配置USB规则,执行
sh l_openvino_toolkit_runtime_raspbian_p_2019.3.334/install_dependencies/install_NCS_udev_rules.sh

将英特尔神经棒插到蓝色usb口(蓝色是3.0)
四、人脸识别demo测试验证安装是否成功
4.1、命令行验证
4.1.1、编译object_detection_sample_ssd模型
进入home/pi/Downloads/l_openvino_toolkit_runtime_raspbian_p_2019.3.334/deployment_tools/inference_engine/samples目录,执行:
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release -DCMAKE_CXX_FLAGS="-march=armv7-a"
make -j2 object_detection_sample_ssd

4.1.2、下载网络和权重文件
wget --no-check-certificate https://download.01.org/opencv/2019/open_model_zoo/R1/models_bin/face-detection-adas-0001/FP16/face-detection-adas-0001.bin
wget --no-check-certificate https://download.01.org/opencv/2019/open_model_zoo/R1/models_bin/face-detection-adas-0001/FP16/face-detection-adas-0001.xml
4.1.3、人脸图片测试
./armv7l/Release/object_detection_sample_ssd -m face-detection-adas-0001.xml -d MYRIAD -i
#



4.2、opencv + python api调用方法验证
4.2.1、编写face_detection.py文件
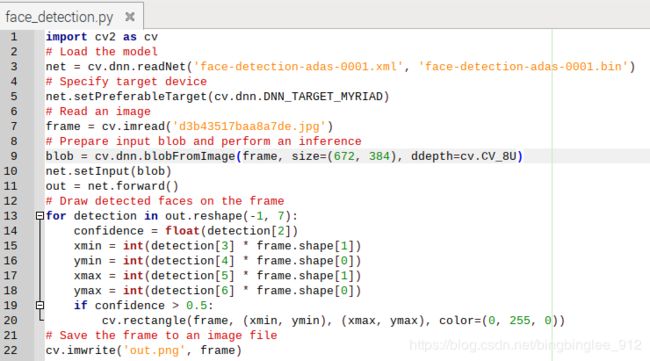
新建一个文件夹,将上一步下载的face-detection-adas-0001.xml及face-detection-adas-0001.bin文件copy到此文件夹下,将待检测的图片放入此文件夹下,然后新建一个face_detection.py文件,写入:
import cv2 as cv
# Load the model
net = cv.dnn.readNet('face-detection-adas-0001.xml', 'face-detection-adas-0001.bin')
# Specify target device
net.setPreferableTarget(cv.dnn.DNN_TARGET_MYRIAD)
# Read an image
frame = cv.imread('/path/to/image')
# Prepare input blob and perform an inference
blob = cv.dnn.blobFromImage(frame, size=(672, 384), ddepth=cv.CV_8U)
net.setInput(blob)
out = net.forward()
# Draw detected faces on the frame
for detection in out.reshape(-1, 7):
confidence = float(detection[2])
xmin = int(detection[3] * frame.shape[1])
ymin = int(detection[4] * frame.shape[0])
xmax = int(detection[5] * frame.shape[1])
ymax = int(detection[6] * frame.shape[0])
if confidence > 0.5:
cv.rectangle(frame, (xmin, ymin), (xmax, ymax), color=(0, 255, 0))
# Save the frame to an image file
cv.imwrite('out.png', frame)
4.2.2、人脸图片验证
打开命令窗口进入此文件夹路径下,执行:
python3 face_detection.py
待执行完毕之后即可在此文件夹下看到生成的out.png图片
五、参考资料
1.子豪兄教你在树莓派上安装OpenCV
2.一劳永逸安装和配置python3.7.2
3.树莓派新手无痛开机指南
4.一劳永逸配置树莓派
5.十行Python代码实现人脸识别
6.毫秒级检测!你见过带GPU的树莓派吗?
7.【超详细】树莓派4B 英特尔神经棒2代 Openvino安装记录
8.从零开始搭建树莓派 + intel movidius 神经元计算棒2代深度学习环境
9.树莓派4B+NCS2代测试yolov3和yolov3_tiny实现object_detection
10.OpenVINO概述
11.Windows环境下OpenVINO安装与配置
12.Linux环境下OpenVINO安装与配置