获取图像像素指针、掩膜操作解释
获取图像像素指针
CV_Assert(myImage.depth() == CV_8U);Mat.ptr获取像素矩阵的指针,索引 i 表示第几行,从0开始计行数。(int i=0) - 获得当前行指针
const uchar* current= myImage.ptr(row ); - 获取当前像素点P(row, col)的像素值
p(row, col) =current[col]
像素范围处理 saturate_cast
saturate_cast,返回 0。(-100) saturate_cast,返回255(288) saturate_cast,返回100(100) - 这个函数的功能是确保RGB值得范围在0~255之间
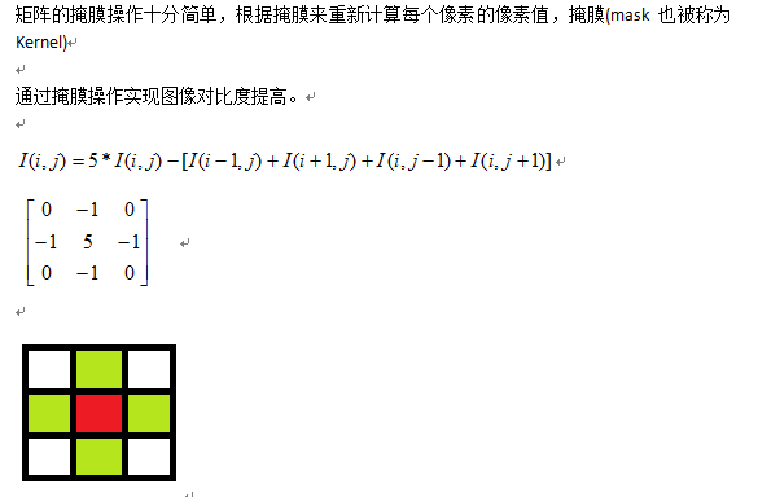
掩膜操作实现图像对比度调整
红色是中心像素,从上到下,从左到右对每个像素做同样的处理操作,得到最终结果就是对比度提高之后的输出图像Mat对象
函数调用filter2D功能
1. 定义掩膜:``Mat kernel = (Mat_(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);``
2. ``filter2D( src, dst, src.depth(), kernel );``其中src与dst是Mat类型变量、src.depth表示位图深度,有32、24、8等
代码演示
#include
#include
#include
using namespace cv;
int main(int argc, char** argv) {
// 加载图片
Mat src, dst;
src = imread("D:/vcprojects/images/test.png");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
int cols = (src.cols-1) * src.channels();
int offsetx = src.channels();
int rows = src.rows;
dst = Mat::zeros(src.size(), src.type());
for (int row = 1; row < (rows - 1); row++) {
const uchar* previous = src.ptr(row - 1);
const uchar* current = src.ptr(row); // 获取当前行指针
const uchar* next = src.ptr(row + 1);
uchar* output = dst.ptr(row);
for (int col = offsetx; col < cols; col++) { // 像素范围处理
output[col] = saturate_cast(5 * current[col] - (current[col- offsetx] + current[col+ offsetx] + previous[col] + next[col]));
}
}
double t = getTickCount();
// 调用filter2D
Mat kernel = (Mat_(3, 3) << 0, -1, 0, // 定义掩膜
-1, 5, -1,
0, -1, 0);
filter2D(src, dst, src.depth(), kernel); // 相关参数
double timeconsume = (getTickCount() - t) / getTickFrequency();
printf("tim consume %.2f\n", timeconsume);
namedWindow("contrast image demo", CV_WINDOW_AUTOSIZE);
imshow("contrast image demo", dst);
waitKey(0);
return 0;
}