1. 运动控制
1.1 键盘控制
启动驱动
roslaunch pibot_bringup bringup.launch,下同
roslaunch pibot keyboard_teleop.launch
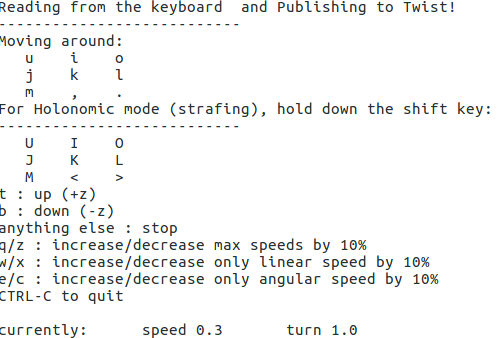
根据提示可以控制全向的Zues和差分的Apollo小车
1.2 手柄控制
连接手柄
连接手柄至电脑或者Raspberry Pi 3
ls /dev/input/js* -l
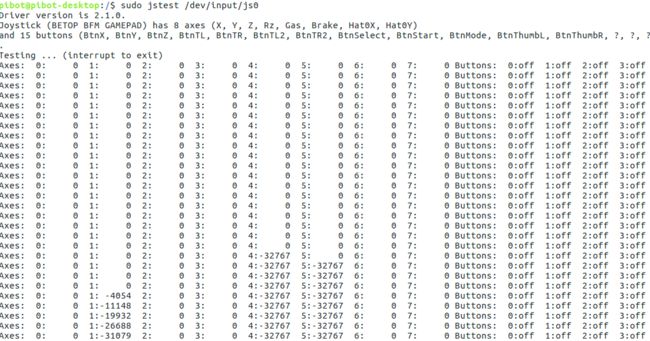
测试手柄
sudo jstest /dev/input/js0
手柄控制
Zeus小车
roslaunch pibot joystick.launch
Apollo小车
roslaunch pibot joystick-holonomic.launch
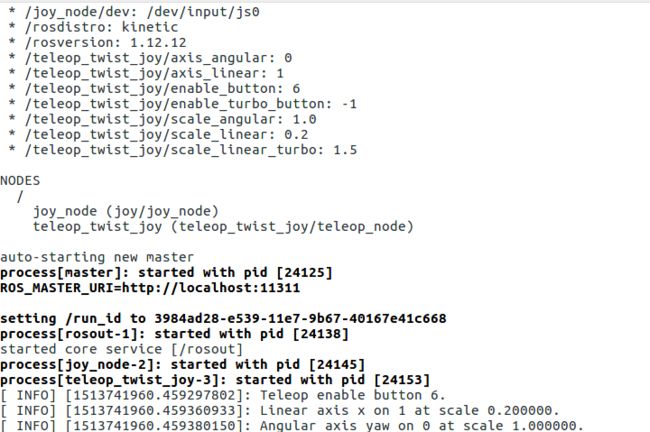
joystick.launch
joystick.config.yaml
axis_linear: 1 # Left thumb stick vertical
scale_linear: 0.2
scale_linear_turbo: 1.5
axis_angular: 0 # Left thumb stick horizontal
scale_angular: 1.0
enable_button: 6 # Left trigger button
enable_turbo_button: -1
1.3 App控制
2. 里程校准
linear_calibrate
校准
- 启动驱动
roslaunch pibot_bringup bringup.launch - 启动校准
rosrun pibot calibrate_linear.py

- 按照提示启动
rosrun rqt_reconfigure rqt_reconfigure
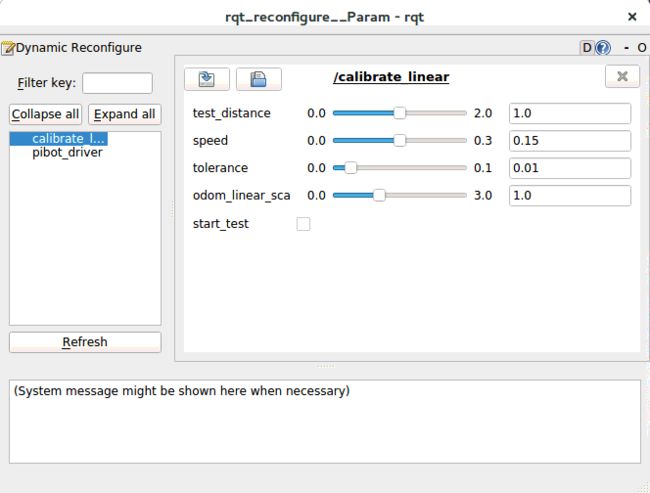
切换到calibrate_linear选项, 勾选start_test即可开始测试。小车按照设置的速度(speed),向前运动设定的距离(test_distance),误差不超过设定值(tolerance)
odom_linear_scale_correction为比例参数,设为默认1即可
调整参数
用尺子测量小车实际行径距离,如果与test_distance相差较大,则需要调整相关参数
对于2轮差分Apollo
differential.h
void get_odom(struct Odom* odom, float* motor_dis, unsigned long interval)
{
float dxy_ave = (-motor_dis[0] + motor_dis[1]) / 2.0;
float dth = (motor_dis[0] + motor_dis[1]) / (2* body_radius);
float vxy = 1000 * dxy_ave / interval;
float vth = 1000 * dth / interval;
odom->vel_x = vxy;
odom->vel_y = 0;
odom->vel_z = vth;
float dx = 0, dy = 0;
if (motor_dis[0] != motor_dis[1])
{
dx = cos(dth) * dxy_ave;
dy = -sin(dth) * dxy_ave;
odom->x += (cos(odom->z) * dx - sin(odom->z) * dy);
odom->y += (sin(odom->z) * dx + cos(odom->z) * dy);;
}
if (motor_dis[0] + motor_dis[1] != 0)
odom->z += dth;
}
单独向前是motor_dis[0] + motor_dis[1]应该为0
左轮向后motor_dis[0]为正,右轮向前为正
容易得到odom->x因为(-motor_dis[0] + motor_dis[1]) / 2.0,而motor_dis[0], motor_dis[1]跟一周编码器个数和轮子的直接相关,在假定一周编码器个数恒定情况下,即只与轮子直接相关
这也是为什么先进行linear_calibrate的原因
如果实际测量值<test_distance,应该如何调整轮子直径,调大?调小?
即例如实际行走了0.8m,计算出来的为1m,
odom->x大了,即用来计算直径的参数大了,应该减小直径。
angular_calibrate
启动校准
rosrun pibot calibrate_angular.py
出现
ImportError: No module named PyKDL错误需要sudo apt-get install ros-kinetic-kdl-parser-py
按照提示启动rqt_reconfigure
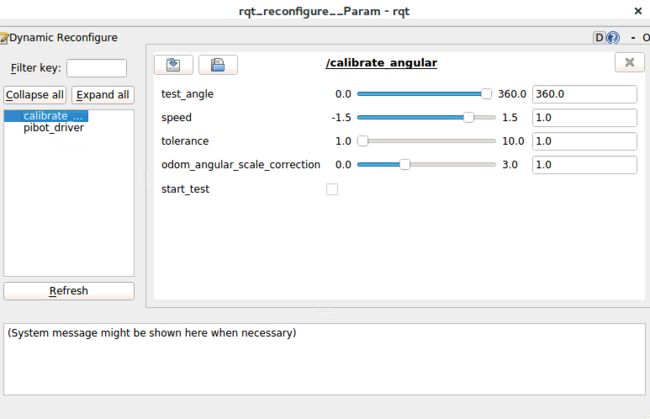
切换到calibrate_angular选项, 勾选start_test即可开始测试。小车按照设置的速度(speed),旋转设定的角度(test_angle),误差不超过设定值(tolerance)
odom_linear_scale_correction为比例参数,设为默认1即可
调整参数
观察设计旋转的角度,如果与test_angle相差较大,则需要调整相关参数
对于2轮差分Apollo
differential.h
void get_odom(struct Odom* odom, float* motor_dis, unsigned long interval)
{
float dxy_ave = (-motor_dis[0] + motor_dis[1]) / 2.0;
float dth = (motor_dis[0] + motor_dis[1]) / (2* body_radius);
float vxy = 1000 * dxy_ave / interval;
float vth = 1000 * dth / interval;
odom->vel_x = vxy;
odom->vel_y = 0;
odom->vel_z = vth;
float dx = 0, dy = 0;
if (motor_dis[0] != motor_dis[1])
{
dx = cos(dth) * dxy_ave;
dy = -sin(dth) * dxy_ave;
odom->x += (cos(odom->z) * dx - sin(odom->z) * dy);
odom->y += (sin(odom->z) * dx + cos(odom->z) * dy);;
}
if (motor_dis[0] + motor_dis[1] != 0)
odom->z += dth;
}
旋转是odom->z为dth累加即 (motor_dis[0] + motor_dis[1]) / (2* body_radius)
先前完成了
linear_calibrate,(motor_dis[0] + motor_dis[1])就固定了,现在odom->z就只与body_radius相关,且为反比关系
如果实际观察角度<test_angle,应该如何调整轮子间距,调大?调小?
即例如实际行走了345°,计算出来的为360°,
odom->z大了即body_radius小了(反比),应该增加body_radius。
备注
上述为差分轮apollo的参数调整,zues 、hades和hera也类似
如果实在搞不清楚应该调大参数还是调小,那就调整参数直接测试,观察结果,这样直接也同样高效!