opencv中利用霍夫变换检测直线对图片进行校正
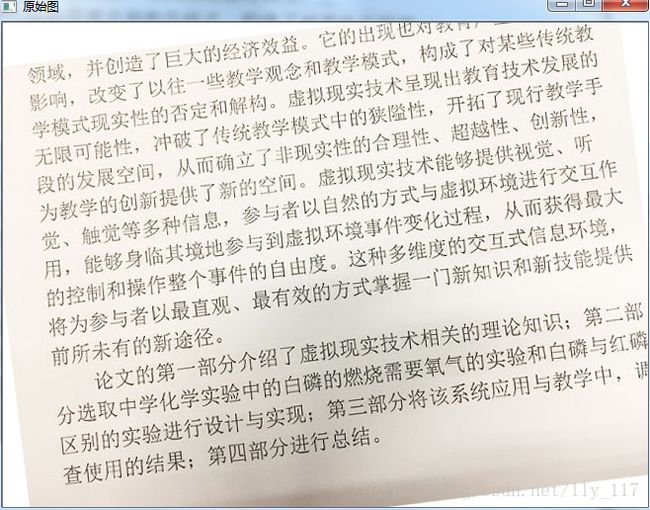
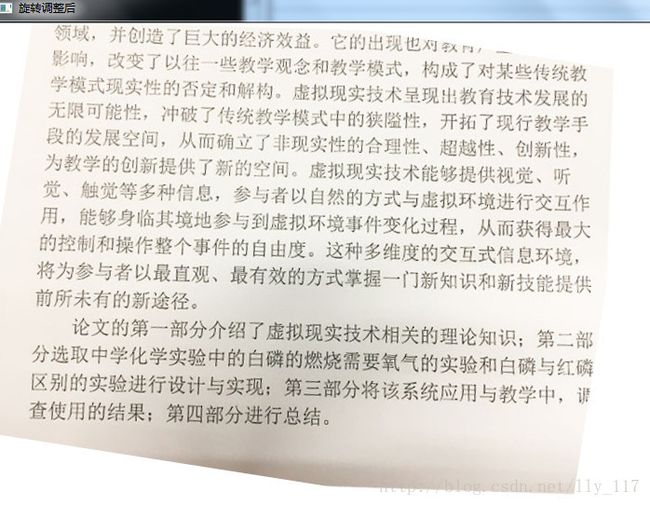
图片校正
利用霍夫变换检测直线,校正拍摄倾斜的图片
#include效果图如下所示: