linux网络编程二十二:高性能定时器之时间轮
之前我们提到,基于排序链表的定时器存在一个问题:添加定时器的效率偏低。下面我们讨论的时间轮解决了这个问题。
如图,这是一种简单的时间轮:
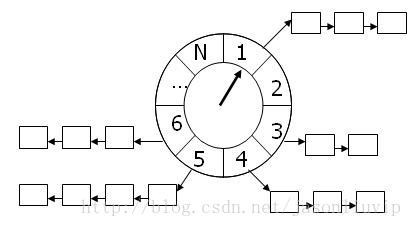
轮中的实线指针指向轮子上的一个槽(slot),它以恒定的速度顺时针转动,每转动一步就指向下一个槽,每次转动称为一个滴答(tick)。
一个滴答的时间称为是间轮的槽间隔si(slot interval),它实际上就是心跳时间。
该轮共有N个槽,因此它运转一周的时间是N×si 。每个槽指向一条定时器链表,每条链表上的定时器具有相同的特性:它们的定时时间相差N×si的整数倍。时间轮正是利用这个关系将定时器散列到不同的链表中。
假如现在指针指向槽cs,我们要添加一个定时时间为ti的定时器,则该定时器将被插入ts(timer slot)对应的链表中:ts = (cs + (ti / si)) %N
基于排序链表的定时器使用唯一的一条链表来管理所有定时器,所以插入操作的效率随着定时器数目的增多而降低。而时间轮使用哈希表的思想,将定时器散列到不同的链表上。
这样每条链表上的定时数目都将明显减少,插入操作的效率受定时器数目的影响较少。
很显然,对时间轮而言,要提高定时精度,就要使si值足够小;要提高执行效率,则要求N值足够大。
下面我们实现一个简单的时间轮,只实现一个轮子。复杂的时间轮可以有多个,不同的轮子有不同粒度。相邻的两个轮子,精度高的转一圈,精度低的仅往前移动一槽,就像水表一样。
对时间轮而言,添加一个定时器的时间复杂度是O(1), 删除一个定时器的时间复杂度是O(1),执行一个定时器的时间复杂度是O(n)。
但实际上执行一个定时器的效率要比O(n)高得多,因为时间轮将所有的定时器散列到了不同的链表上,时间轮的槽越多,等于散列表的入口越多,从而每条链表上的定时器数量越少。此外,我们的代码仅用了一个时间轮,当使用多个轮子来实现时,它的时间复杂度将接近O(1)。
关于linux下定时器的实现方式对比,大家可以看看这篇文章,写的挺不错的:http://www.ibm.com/developerworks/cn/linux/l-cn-timers/
1. 代码:
//tw_timer.h
#ifndef __TIME_WHEEL__
#define __TIME_WHEEL__
#include
#include
#include
#define BUFFER_SIZE 64
class tw_timer;
//客户端数据
struct client_data
{
sockaddr_in address;
int sockfd;
char buf[BUFFER_SIZE];
tw_timer *timer;
};
//定时器
class tw_timer
{
public:
tw_timer(int rot, int ts)
:next(NULL), prev(NULL), rotation(rot), time_slot(ts) {}
public:
int rotation; //定时器在时间轮上转多少圈后生效
int time_slot; //定时器属于时间轮上的哪个槽
void (*cb_func)(client_data*); //定时器的回调函数
client_data *user_data; //客户端数据
tw_timer *prev; //指向上一个定时器
tw_timer *next; //指向下一个定时器
};
//时间轮
class time_wheel
{
public:
time_wheel();
~time_wheel();
tw_timer* add_timer(int timeout); //根据定时值创建定时器,并插入合适的位置
void del_timer(tw_timer *timer); //删除目标定时器
void tick(); //时间到后调用该函数,时间轮向前滚动一个槽间隔
private:
static const int N = 60; //时间轮上槽的数目
static const int TI = 1; //槽间隔时间,即每1秒时间轮转动一次
int cur_slot; //时间轮的当前槽
tw_timer *slots[N]; //时间轮的槽,其中每个元素指向一个定时器链表
};
#endif
//tw_timer.cpp
#include "tw_timer.h"
time_wheel::time_wheel():cur_slot(0)
{
//初始化每个槽的头结点
for (int i = 0; i < N; ++i)
slots[i] = NULL;
}
time_wheel::~time_wheel()
{
//遍历每个槽,并销毁定时器
for (int i = 0; i < N; ++i) {
tw_timer *tmp = slots[i];
while (tmp) {
slots[i] = tmp->next;
delete tmp;
tmp = slots[i];
}
}
}
tw_timer* time_wheel::add_timer(int timeout)
{
if (timeout < 0)
return NULL;
int ticks = 0; //待插入定时器所需要总ticks
if (timeout < TI)
ticks = 1;
else
ticks = timeout / TI;
int rotation = ticks / N; //计算待插入的定时器在时间轮上要转动多少圈后触发
int ts = (cur_slot + ticks) % N; //计算待持入定时器应该被插入的位置
//int ts = (cur_slot + (ticks %N)) % N;
//创建定时器,它在时间轮转动rotation圈之后触发,且位于第ts个槽上
tw_timer *timer = new tw_timer(rotation, ts);
//如果槽为空,则它新定时器插入,并设置为该槽的头节点
if (!slots[ts]) {
printf("add timer, rotation is %d, ts is %d, cur_slot is %d\n",
rotation, ts, cur_slot);
slots[ts] = timer;
}
else {
timer->next = slots[ts];
slots[ts]->prev = timer;
slots[ts] = timer;
}
return timer;
}
void time_wheel::del_timer(tw_timer *timer)
{
if (!timer)
return;
int ts = timer->time_slot;
if (timer == slots[ts]) { //如果是头结点
slots[ts] = slots[ts]->next;
if (slots[ts])
slots[ts]->prev = NULL;
delete timer;
}
else {
timer->prev->next = timer->next;
if (timer->next)
timer->next->prev = timer->prev;
delete timer;
}
}
void time_wheel::tick()
{
//取得时间轮上当前槽的头结点
tw_timer *tmp = slots[cur_slot];
printf("current slot is %d\n", cur_slot);
while (tmp) {
printf("tick the timer once\n");
//如果定时器的rotation值大于0,则未到时,不处理
if (tmp->rotation > 0) {
tmp->rotation--;
tmp = tmp->next;
}
else {
tmp->cb_func(tmp->user_data);
if (tmp == slots[cur_slot]) {
printf("delete header in cur_slot\n");
slots[cur_slot] = tmp->next;
delete tmp;
if (slots[cur_slot])
slots[cur_slot]->prev = NULL;
tmp = slots[cur_slot];
}
else {
tmp->prev->next = tmp->next;
if (tmp->next)
tmp->next->prev = tmp->prev;
tw_timer *tmp2 = tmp->next;
delete tmp;
tmp = tmp2;
}
}
}
//更新时间轮的当前槽,以反映时间轮的转动
cur_slot = ++cur_slot % N;
}
//nonactive_conn.cpp
//关闭非活动连接
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "tw_timer.h"
#define FD_LIMIT 65535
#define MAX_EVENT_NUMBER 1024
#define TIMESLOT 100
static int pipefd[2];
static time_wheel client_conn_time_wheel;
static int epollfd = 0;
int setnonblocking(int fd); //设置非阻塞
int addfd(int epollfd, int fd); //添加描述符事件
void sig_handler(int sig); //信号处理函数
void addsig(int sig); //添加信号处理函数
void timer_handler(); //定时器任务
void cb_func(client_data *user_data); //定时器回调函数
int main(int argc, char *argv[])
{
if (argc != 2) {
fprintf(stderr, "Usage: %s port\n", argv[0]);
return 1;
}
int port = atoi(argv[1]);
int ret = 0;
int error;
struct sockaddr_in address;
bzero(&address, sizeof(address));
address.sin_family = AF_INET;
address.sin_port = htons(port);
address.sin_addr.s_addr = htonl(INADDR_ANY);
int sockfd = socket(PF_INET, SOCK_STREAM, 0);
if (sockfd == -1) {
fprintf(stderr, "create socket failed\n");
return 1;
}
int reuse = 1;
ret = setsockopt(sockfd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse));
if (ret == -1) {
error = errno;
while ((close(sockfd) == -1) && (errno == EINTR));
errno = error;
return 1;
}
if ( (bind(sockfd, (struct sockaddr*)&address, sizeof(address)) == -1) ||
(listen(sockfd, 5) == -1)) {
error = errno;
while ((close(sockfd) == -1) && (errno == EINTR));
errno = error;
return 1;
}
int epollfd = epoll_create(5);
if (epollfd == -1) {
error = errno;
while ((close(sockfd)) && (errno == EINTR));
errno = error;
return 1;
}
ret = socketpair(PF_UNIX, SOCK_STREAM, 0, pipefd);
if (ret == -1) {
error = errno;
while ((close(sockfd) == -1) && (errno == EINTR));
errno = error;
return 1;
}
epoll_event events[MAX_EVENT_NUMBER];
setnonblocking(pipefd[1]);
addfd(epollfd, pipefd[0]);
addfd(epollfd, sockfd);
//添加信号处理
addsig(SIGALRM);
addsig(SIGTERM);
bool stop_server = false;
client_data *users = new client_data[FD_LIMIT];
bool timeout = false;
alarm(1);
printf("server start...\n");
while (!stop_server) {
int number = epoll_wait(epollfd, events, MAX_EVENT_NUMBER, -1);
if (number < 0 && errno != EINTR) {
fprintf(stderr, "epoll_wait failed\n");
break;
}
for (int i = 0; i < number; i++) {
int listenfd = events[i].data.fd;
if (listenfd == sockfd) {
struct sockaddr_in client_address;
socklen_t client_addrlength = sizeof(client_address);
int connfd;
while ( ((connfd = accept(listenfd, (struct sockaddr*)&client_address, &client_addrlength)) == -1) &&
(errno == EINTR));
addfd(epollfd, connfd);
users[connfd].address = client_address;
users[connfd].sockfd = connfd;
tw_timer *timer = NULL;
timer = client_conn_time_wheel.add_timer(TIMESLOT);
if (timer) {
timer->user_data = &users[connfd];
timer->cb_func = cb_func;
users[connfd].timer = timer;
fprintf(stderr, "client: %d add tw_timer successed\n", connfd);
}
else {
fprintf(stderr, "client: %d add tw_timer failed\n", connfd);
}
}
else if((listenfd == pipefd[0]) && (events[i].events & EPOLLIN)) {
int sig;
char signals[1024];
ret = recv(pipefd[0], signals, sizeof(signals), 0);
if (ret == -1) {
continue;
}
else if (ret == 0) {
continue;
}
else {
for (int i = 0; i < ret; i++) {
switch (signals[i]) {
case SIGALRM:
{
timeout = true;
break;
}
case SIGTERM:
{
stop_server = true;
break;
}
default:
break;
}
}
}
}
else if (events[i].events & EPOLLIN) {
memset(users[listenfd].buf, '\0', BUFFER_SIZE);
ret = recv(listenfd, users[listenfd].buf, BUFFER_SIZE-1, 0);
printf("get %d bytes of client data: %s from %d\n",
ret, users[listenfd].buf, listenfd);
tw_timer *timer = users[listenfd].timer;
if (ret < 0) {
if (errno != EAGAIN) {
cb_func(&users[listenfd]);
if (timer)
client_conn_time_wheel.del_timer(timer);
}
}
else if (ret == 0) {
cb_func(&users[listenfd]);
if (timer)
client_conn_time_wheel.del_timer(timer);
}
else {
if (timer) {
printf("conntioned..to do adjuest timer\n");
}
}
}
else {
}
}
if (timeout) {
timer_handler();
timeout = false;
}
}
close(sockfd);
close(pipefd[1]);
close(pipefd[0]);
delete[] users;
return 0;
}
int setnonblocking(int fd)
{
int old_option = fcntl(fd, F_GETFL);
int new_option = old_option | O_NONBLOCK;
fcntl(fd, F_SETFL, new_option);
return old_option;
}
int addfd(int epollfd, int fd)
{
epoll_event event;
event.data.fd = fd;
event.events = EPOLLIN | EPOLLET;
epoll_ctl(epollfd, EPOLL_CTL_ADD, fd, &event);
setnonblocking(fd);
}
void sig_handler(int sig)
{
int save_error = errno;
int msg = sig;
send(pipefd[1], (char*)&msg, 1, 0);
errno = save_error;
}
void addsig(int sig)
{
struct sigaction sa;
memset(&sa, '\0', sizeof(sa));
sa.sa_handler = sig_handler;
sa.sa_flags |= SA_RESTART;
sigfillset(&sa.sa_mask);
assert(sigaction(sig, &sa, NULL) != -1);
}
void timer_handler()
{
client_conn_time_wheel.tick();
alarm(1);
}
void cb_func(client_data *user_data)
{
epoll_ctl(epollfd, EPOLL_CTL_DEL, user_data->sockfd, 0);
assert(user_data);
close(user_data->sockfd);
printf("close fd %d\n", user_data->sockfd);
}
参考:《linux高性能服务器编程》