Linux芯片级移植与底层驱动(基于3.7.4内核)
![]()
宋宝华的blog
Linux Consultant
- 目录视图
- 摘要视图
- 订阅
2016攒课第二期之你听课我买单,快来攒你想听的课! 2016大数据应用调查 2016年7月微软MVP申请开始了!
Linux芯片级移植与底层驱动(基于3.7.4内核)
2013-01-26 18:40 31834人阅读 评论(4) 收藏 举报
分类:
Linux Kernel开发(14)
版权声明:本文为博主原创文章,未经博主允许不得转载。
目录(?)[+]
宋宝华 BarrySong <[email protected]>
新浪微博: @宋宝华Barry
1. SoC Linux底层驱动的组成和现状
为了让Linux在一个全新的ARM SoC上运行,需要提供大量的底层支撑,如定时器节拍、中断控制器、SMP启动、CPU hotplug以及底层的GPIO、clock、pinctrl和DMA硬件的封装等。定时器节拍、中断控制器、SMP启动和CPU hotplug这几部分相对来说没有像早期GPIO、clock、pinctrl和DMA的实现那么杂乱,基本上有个固定的套路。定时器节拍为Linux基于时间片的调度机制以及内核和用户空间的定时器提供支撑,中断控制器的驱动则使得Linux内核的工程师可以直接调用local_irq_disable()、disable_irq()等通用的中断API,而SMP启动支持则用于让SoC内部的多个CPU核都投入运行,CPU hotplug则运行运行时挂载或拔除CPU。这些工作,在Linux 3.7内核中,进行了良好的层次划分和架构设计。
在GPIO、clock、pinctrl和DMA驱动方面,Linux 2.6时代,内核已或多或少有GPIO、clock等底层驱动的架构,但是核心层的代码太薄弱,各SoC对这些基础设施实现方面存在巨大差异,而且每个SoC仍然需要实现大量的代码。pinctrl和DMA则最为混乱,几乎各家公司都定义了自己的独特的实现和API。
社区必须改变这种局面,于是内核社区在2011~2012年进行了如下工作,这些工作在目前的3.7内核中基本准备就绪:
§ ST-Ericsson的工程师Linus Walleij提供了新的pinctrl驱动架构,内核新增加一个drivers/pinctrl目录,支撑SoC上的引脚复用,各个SoC的实现代码统一放入该目录;
§ TI的工程师Mike Turquette提供了common clk框架,让具体SoC实现clk_ops成员函数并通过clk_register、clk_register_clkdev注册时钟源以及源与设备对应关系,具体的clock驱动都统一迁移到drivers/clk目录;
§ 建议各SoC统一采用dmaengine架构实现DMA驱动,该架构提供了通用的DMA通道API如dmaengine_prep_slave_single()、dmaengine_submit()等,要求SoC实现dma_device的成员函数 ,实现代码统一放入drivers/dma目录;
§ 在GPIO方面,drivers/gpio下的gpiolib已能与新的pinctrl完美共存,实现引脚的GPIO和其他功能之间的复用,具体的SoC只需实现通用的gpio_chip结构体的成员函数。
经过以上工作,基本上就把芯片底层的基础架构方面的驱动的架构统一了,实现方法也统一了。另外,目前GPIO、clock、pinmux等功能都能良好的进行Device Tree的映射处理,譬如我们可以方面的在.dts中定义一个设备要的时钟、pinmux引脚以及GPIO。
除了上述基础设施以外,在将Linux移植入新的SoC过程中,工程师常常强烈依赖于早期的printk功能,内核则提供了相关的DEBUG_LL和EARLY_PRINTK支持,只需要SoC提供商实现少量的callback或宏。
本文主要对上述各个组成部分进行架构上的剖析以及关键的实现部分的实例分析,以求完整归纳将Linux移植入新SoC的主要工作。本文基于3.7.4内核。
2. 用于操作系统节拍的timer驱动
Linux 2.6的早期(2.6.21之前)基于tick设计,一般SoC公司在将Linux移植到自己的芯片上的时候,会从芯片内部找一个定时器,并将该定时器配置会HZ的频率,在每个时钟节拍到来时,调用ARM Linux内核核心层的timer_tick()函数,从而引发系统里的一系列行为。如2.6.17中arch/arm/mach-s3c2410/time.c的做法是:
127/*
128 * IRQ handler for the timer
129 */
130static irqreturn_t
131s3c2410_timer_interrupt(int irq, void*dev_id, struct pt_regs *regs)
132{
133 write_seqlock(&xtime_lock);
134 timer_tick(regs);
135 write_sequnlock(&xtime_lock);
136 return IRQ_HANDLED;
137}
138
139static struct irqaction s3c2410_timer_irq ={
140 .name = "S3C2410Timer Tick",
141 .flags = SA_INTERRUPT | SA_TIMER,
142 .handler =s3c2410_timer_interrupt,
143};
252staticvoid __init s3c2410_timer_init (void)
253{
254 s3c2410_timer_setup();
255 setup_irq(IRQ_TIMER4, &s3c2410_timer_irq);
256}
257
当前Linux多采用tickless方案,并支持高精度定时器,内核的配置一般会使能NO_HZ(即tickless,或者说动态tick)和HIGH_RES_TIMERS。要强调的是tickless并不是说系统中没有时钟节拍了,而是说这个节拍不再像以前那样,周期性地产生。Tickless意味着,根据系统的运行情况,以事件驱动的方式动态决定下一个tick在何时发生。如果画一个时间轴,周期节拍的系统tick中断发生的时序看起来如下:
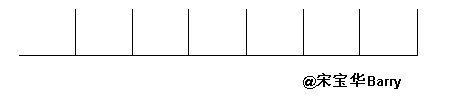
而NO_HZ的Linux看起来则是,2次定时器中断发生的时间间隔可长可短:

在当前的Linux系统中,SoC底层的timer被实现为一个clock_event_device和clocksource形式的驱动。在clock_event_device结构体中,实现其set_mode()和set_next_event()成员函数;在clocksource结构体中,主要实现read()成员函数。而定时器中断服务程序中,不再调用timer_tick(),而是调用clock_event_device的event_handler()成员函数。一个典型的SoC的底层tick定时器驱动形如:
61static irqreturn_t xxx_timer_interrupt(intirq, void *dev_id)
62{
63 struct clock_event_device *ce = dev_id;
65 …
70 ce->event_handler(ce);
71
72 return IRQ_HANDLED;
73}
74
75/* read 64-bit timer counter */
76static cycle_t xxx_timer_read(structclocksource *cs)
77{
78 u64 cycles;
79
80 /* read the 64-bit timer counter */
81 cycles = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_HI);
83 cycles = (cycles << 32) | readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
84
85 return cycles;
86}
87
88static int xxx_timer_set_next_event(unsignedlongdelta,
89 struct clock_event_device *ce)
90{
91 unsigned long now, next;
92
93 writel_relaxed(XXX_TIMER_LATCH_BIT, xxx_timer_base + XXX_TIMER_LATCH);
94 now = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
95 next = now + delta;
96 writel_relaxed(next, xxx_timer_base + SIRFSOC_TIMER_MATCH_0);
97 writel_relaxed(XXX_TIMER_LATCH_BIT, xxx_timer_base + XXX_TIMER_LATCH);
98 now = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
99
100 return next - now > delta ? -ETIME : 0;
101}
102
103static void xxx_timer_set_mode(enumclock_event_mode mode,
104 struct clock_event_device *ce)
105{
107 switch (mode) {
108 case CLOCK_EVT_MODE_PERIODIC:
109 …
111 case CLOCK_EVT_MODE_ONESHOT:
112 …
114 case CLOCK_EVT_MODE_SHUTDOWN:
115 …
117 case CLOCK_EVT_MODE_UNUSED:
118 case CLOCK_EVT_MODE_RESUME:
119 break;
120 }
121}
144static struct clock_event_device xxx_clockevent= {
145 .name = "xxx_clockevent",
146 .rating = 200,
147 .features = CLOCK_EVT_FEAT_ONESHOT,
148 .set_mode = xxx_timer_set_mode,
149 .set_next_event = xxx_timer_set_next_event,
150};
151
152static struct clocksource xxx_clocksource ={
153 .name = "xxx_clocksource",
154 .rating = 200,
155 .mask = CLOCKSOURCE_MASK(64),
156 .flags = CLOCK_SOURCE_IS_CONTINUOUS,
157 .read = xxx_timer_read,
158 .suspend = xxx_clocksource_suspend,
159 .resume = xxx_clocksource_resume,
160};
161
162static struct irqaction xxx_timer_irq = {
163 .name = "xxx_tick",
164 .flags = IRQF_TIMER,
165 .irq = 0,
166 .handler = xxx_timer_interrupt,
167 .dev_id = &xxx_clockevent,
168};
169
176static void __init xxx_clockevent_init(void)
177{
178 clockevents_calc_mult_shift(&xxx_clockevent, CLOCK_TICK_RATE, 60);
179
180 xxx_clockevent.max_delta_ns =
181 clockevent_delta2ns(-2, &xxx_clockevent);
182 xxx_clockevent.min_delta_ns =
183 clockevent_delta2ns(2, &xxx_clockevent);
184
185 xxx_clockevent.cpumask = cpumask_of(0);
186 clockevents_register_device(&xxx_clockevent);
187}
188
189/* initialize the kernel jiffy timer source*/
190static void __init xxx_timer_init(void)
191{
192 …
214
215 BUG_ON(clocksource_register_hz(&xxx_clocksource, CLOCK_TICK_RATE));
218
219 BUG_ON(setup_irq(xxx_timer_irq.irq,&xxx_timer_irq));
220
221 xxx_clockevent_init();
222}
249struct sys_timer xxx_timer = {
250 .init = xxx_timer_init,
251};
上述代码中,我们特别关注其中的如下函数:
clock_event_device的set_next_event 成员函数xxx_timer_set_next_event()
该函数的delta参数是Linux内核传递给底层定时器的一个差值,它的含义是下一次tick中断产生的硬件定时器中计数器counter的值相对于当前counter的差值。我们在该函数中将硬件定时器设置为在“当前counter计数值” + delta的时刻产生下一次tick中断。xxx_clockevent_init()函数中设置了可接受的最小和最大delta值对应的纳秒数,即xxx_clockevent.min_delta_ns和xxx_clockevent.max_delta_ns。
clocksource 的read成员函数xxx_timer_read()
该函数可读取出从开机以来到当前时刻定时器计数器已经走过的值,无论有没有设置计数器达到某值的时候产生中断,硬件的计数总是在进行的。因此,该函数给Linux系统提供了一个底层的准确的参考时间。
定时器的中断服务程序xxx_timer_interrupt()
在该中断服务程序中,直接调用clock_event_device的event_handler()成员函数,event_handler()成员函数的具体工作也是Linux内核根据Linux内核配置和运行情况自行设置的。
clock_event_device的set_mode成员函数 xxx_timer_set_mode()
用于设置定时器的模式以及resume和shutdown等功能,目前一般采用ONESHOT模式,即一次一次产生中断。当然新版的Linux也可以使用老的周期性模式,如果内核编译的时候未选择NO_HZ,该底层的timer驱动依然可以为内核的运行提供支持。
这些函数的结合,使得ARM Linux内核底层所需要的时钟得以运行。下面举一个典型的场景,假定定时器的晶振时钟频率为1MHz(即计数器每加1等于1us),应用程序透过nanosleep() API睡眠100us,内核会据此换算出下一次定时器中断的delta值为100,并间接调用到xxx_timer_set_next_event()去设置硬件让其在100us后产生中断。100us后,中断产生,xxx_timer_interrupt()被调用,event_handler()会间接唤醒睡眠的进程导致nanosleep()函数返回,从而用户进程继续。
这里特别要强调的是,对于多核处理器来说,一般的做法是给每个核分配一个独立的定时器,各个核根据自身的运行情况动态设置自己时钟中断发生的时刻。看看我们说运行的电脑的local timer中断即知:
barry@barry-VirtualBox:~$cat /proc/interrupts
CPU0 CPU1 CPU2 CPU3
…
20: 945 0 0 0 IO-APIC-fasteoi vboxguest
21: 4456 0 0 21592 IO-APIC-fasteoi ahci, Intel 82801AA-ICH
22: 26 0 0 0 IO-APIC-fasteoi ohci_hcd:usb2
NMI: 0 0 0 0 Non-maskable interrupts
LOC: 177279 177517 177146 177139 Local timer interrupts
SPU: 0 0 0 0 Spurious interrupts
PMI: 0 0 0 0 Performance monitoring
…
而比较低效率的方法则是只给CPU0提供定时器,由CPU0将定时器中断透过IPI(InterProcessor Interrupt,处理器间中断)广播到其他核。对于ARM来讲,1号IPIIPI_TIMER就是来负责这个广播的,从arch/arm/kernel/smp.c可以看出:
62enum ipi_msg_type {
63 IPI_WAKEUP,
64 IPI_TIMER,
65 IPI_RESCHEDULE,
66 IPI_CALL_FUNC,
67 IPI_CALL_FUNC_SINGLE,
68 IPI_CPU_STOP,
69 };
3. 中断控制器驱动
在Linux内核中,各个设备驱动可以简单地调用request_irq()、enable_irq()、disable_irq()、local_irq_disable()、local_irq_enable()等通用API完成中断申请、使能、禁止等功能。在将Linux移植到新的SoC时,芯片供应商需要提供该部分API的底层支持。
local_irq_disable()、local_irq_enable()的实现与具体中断控制器无关,对于ARMv6以上的体系架构而言,是直接调用CPSID/CPSIE指令进行,而对于ARMv6以前的体系结构,则是透过MRS、MSR指令来读取和设置ARM的CPSR寄存器。由此可见,local_irq_disable()、local_irq_enable()针对的并不是外部的中断控制器,而是直接让CPU本身不响应中断请求。相关的实现位于arch/arm/include/asm/irqflags.h:
[cpp] view plain copy
- 11#if __LINUX_ARM_ARCH__ >= 6
- 12
- 13static inline unsigned longarch_local_irq_save(void)
- 14{
- 15 unsigned long flags;
- 16
- 17 asm volatile(
- 18 " mrs %0, cpsr @ arch_local_irq_save\n"
- 19 " cpsid i"
- 20 : "=r" (flags) : :"memory", "cc");
- 21 return flags;
- 22}
- 23
- 24static inline voidarch_local_irq_enable(void)
- 25{
- 26 asm volatile(
- 27 " cpsie i @ arch_local_irq_enable"
- 28 :
- 29 :
- 30 : "memory","cc");
- 31}
- 32
- 33static inline voidarch_local_irq_disable(void)
- 34{
- 35 asm volatile(
- 36 " cpsid i @ arch_local_irq_disable"
- 37 :
- 38 :
- 39 : "memory","cc");
- 40}
- 44#else
- 45
- 46/*
- 47 * Save the current interrupt enable state& disable IRQs
- 48 */
- 49static inline unsigned longarch_local_irq_save(void)
- 50{
- 51 unsigned long flags, temp;
- 52
- 53 asm volatile(
- 54 " mrs %0, cpsr @ arch_local_irq_save\n"
- 55 " orr %1, %0, #128\n"
- 56 " msr cpsr_c, %1"
- 57 : "=r" (flags),"=r" (temp)
- 58 :
- 59 : "memory","cc");
- 60 return flags;
- 61}
- 62
- 63/*
- 64 * Enable IRQs
- 65 */
- 66static inline voidarch_local_irq_enable(void)
- 67{
- 68 unsigned long temp;
- 69 asm volatile(
- 70 " mrs %0, cpsr @ arch_local_irq_enable\n"
- 71 " bic %0, %0, #128\n"
- 72 " msr cpsr_c, %0"
- 73 : "=r" (temp)
- 74 :
- 75 : "memory","cc");
- 76}
- 77
- 78/*
- 79 * Disable IRQs
- 80 */
- 81static inline voidarch_local_irq_disable(void)
- 82{
- 83 unsigned long temp;
- 84 asm volatile(
- 85 " mrs %0, cpsr @arch_local_irq_disable\n"
- 86 " orr %0, %0, #128\n"
- 87 " msr cpsr_c, %0"
- 88 : "=r" (temp)
- 89 :
- 90 : "memory","cc");
- 91}
- 92 #endif
与local_irq_disable()和local_irq_enable()不同,disable_irq()、enable_irq()针对的则是外部的中断控制器。在内核中,透过irq_chip结构体来描述中断控制器。该结构体内部封装了中断mask、unmask、ack等成员函数,其定义于include/linux/irq.h:
[cpp] view plain copy
- 303structirq_chip {
- 304 const char *name;
- 305 unsigned int (*irq_startup)(structirq_data *data);
- 306 void (*irq_shutdown)(struct irq_data *data);
- 307 void (*irq_enable)(struct irq_data *data);
- 308 void (*irq_disable)(struct irq_data *data);
- 309
- 310 void (*irq_ack)(struct irq_data *data);
- 311 void (*irq_mask)(structirq_data *data);
- 312 void (*irq_mask_ack)(struct irq_data *data);
- 313 void (*irq_unmask)(struct irq_data *data);
- 314 void (*irq_eoi)(struct irq_data *data);
- 315
- 316 int (*irq_set_affinity)(struct irq_data *data, const struct cpumask *dest,bool force);
- 317 int (*irq_retrigger)(struct irq_data *data);
- 318 int (*irq_set_type)(struct irq_data *data,unsigned int flow_type);
- 319 int (*irq_set_wake)(struct irq_data *data, unsigned int on);
- 334};
各个芯片公司会将芯片内部的中断控制器实现为irq_chip驱动的形式。受限于中断控制器硬件的能力,这些成员函数并不一定需要全部实现,有时候只需要实现其中的部分函数即可。譬如drivers/pinctrl/pinctrl-sirf.c驱动中的
[cpp] view plain copy
- 1438staticstruct irq_chip sirfsoc_irq_chip = {
- 1439 .name = "sirf-gpio-irq",
- 1440 .irq_ack = sirfsoc_gpio_irq_ack,
- 1441 .irq_mask = sirfsoc_gpio_irq_mask,
- 1442 .irq_unmask = sirfsoc_gpio_irq_unmask,
- 1443 .irq_set_type = sirfsoc_gpio_irq_type,
- 1444};
我们只实现了其中的ack、mask、unmask和set_type成员函数,ack函数用于清中断,mask、unmask用于中断屏蔽和取消中断屏蔽、set_type则用于配置中断的触发方式,如高电平、低电平、上升沿、下降沿等。至于enable_irq()的时候,虽然没有实现irq_enable成员函数,但是内核会间接调用到irq_unmask成员函数,这点从kernel/irq/chip.c可以看出:
[cpp] view plain copy
- 192voidirq_enable(struct irq_desc *desc)
- 193{
- 194 irq_state_clr_disabled(desc);
- 195 if (desc->irq_data.chip->irq_enable)
- 196 desc->irq_data.chip->irq_enable(&desc->irq_data);
- 197 else
- 198 desc->irq_data.chip->irq_unmask(&desc->irq_data);
- 199 irq_state_clr_masked(desc);
- 200}
在芯片内部,中断控制器可能不止1个,多个中断控制器之间还很可能是级联的。举个例子,假设芯片内部有一个中断控制器,支持32个中断源,其中有4个来源于GPIO控制器外围的4组GPIO,每组GPIO上又有32个中断(许多芯片的GPIO控制器也同时是一个中断控制器),其关系如下图:
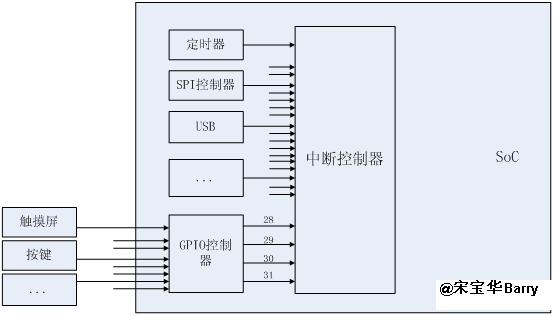
那么,一般来讲,在实际操作中,gpio0_0——gpio0_31这些引脚本身在第1级会使用中断号28,而这些引脚本身的中断号在实现GPIO控制器对应的irq_chip驱动时,我们又会把它映射到Linux系统的32——63号中断。同理,gpio1_0——gpio1_31这些引脚本身在第1级会使用中断号29,而这些引脚本身的中断号在实现GPIO控制器对应的irq_chip驱动时,我们又会把它映射到Linux系统的64——95号中断,以此类推。对于中断号的使用者而言,无需看到这种2级映射关系。如果某设备想申请gpio1_0这个引脚对应的中断,它只需要申请64号中断即可。这个关系图看起来如下:

还是以drivers/pinctrl/pinctrl-sirf.c的irq_chip部分为例,我们对于每组GPIO都透过irq_domain_add_legacy()添加了相应的irq_domain,每组GPIO的中断号开始于SIRFSOC_GPIO_IRQ_START + i *SIRFSOC_GPIO_BANK_SIZE,而每组GPIO本身占用的第1级中断控制器的中断号则为bank->parent_irq,我们透过irq_set_chained_handler()设置了第1级中断发生的时候,会调用链式IRQ处理函数sirfsoc_gpio_handle_irq():
1689 bank->domain =irq_domain_add_legacy(np, SIRFSOC_GPIO_BANK_SIZE,
1690 SIRFSOC_GPIO_IRQ_START+ i * SIRFSOC_GPIO_BANK_SIZE, 0,
1691 &sirfsoc_gpio_irq_simple_ops, bank);
1692
1693 if (!bank->domain) {
1694 pr_err("%s: Failedto create irqdomain\n", np->full_name);
1695 err = -ENOSYS;
1696 goto out;
1697 }
1698
1699 irq_set_chained_handler(bank->parent_irq, sirfsoc_gpio_handle_irq);
1700 irq_set_handler_data(bank->parent_irq, bank);
而在sirfsoc_gpio_handle_irq()函数的入口出调用chained_irq_enter()暗示自身进入链式IRQ处理,在函数体内判决具体的GPIO中断,并透过generic_handle_irq()调用到最终的外设驱动中的中断服务程序,最后调用chained_irq_exit()暗示自身退出链式IRQ处理:
1446staticvoid sirfsoc_gpio_handle_irq(unsigned int irq, struct irq_desc *desc)
1447{
1448 …
1454 chained_irq_enter(chip, desc);
1456 …
1477 generic_handle_irq(first_irq + idx);
1478 …
1484 chained_irq_exit(chip, desc);
1485}
很多中断控制器的寄存器定义呈现出简单的规律,如有一个mask寄存器,其中每1位可屏蔽1个中断等,这种情况下,我们无需实现1个完整的irq_chip驱动,可以使用内核提供的通用irq_chip驱动架构irq_chip_generic,这样只需要实现极少量的代码,如arch/arm/mach-prima2/irq.c中,注册CSRSiRFprimaII内部中断控制器的代码仅为:
26static __init void
27sirfsoc_alloc_gc(void __iomem *base,unsigned int irq_start, unsigned int num)
28{
29 struct irq_chip_generic *gc;
30 struct irq_chip_type *ct;
31
32 gc = irq_alloc_generic_chip("SIRFINTC", 1, irq_start, base,handle_level_irq);
33 ct = gc->chip_types;
34
35 ct->chip.irq_mask = irq_gc_mask_clr_bit;
36 ct->chip.irq_unmask = irq_gc_mask_set_bit;
37 ct->regs.mask = SIRFSOC_INT_RISC_MASK0;
38
39 irq_setup_generic_chip(gc, IRQ_MSK(num), IRQ_GC_INIT_MASK_CACHE,IRQ_NOREQUEST, 0);
40}
特别值得一提的是,目前多数主流ARM芯片,内部的一级中断控制器都使用了ARM公司的GIC,我们几乎不需要实现任何代码,只需要在Device Tree中添加相关的结点并将gic_handle_irq()填入MACHINE的handle_irq成员。
如在arch/arm/boot/dts/exynos5250.dtsi即含有:
36 gic:interrupt-controller@10481000 {
37 compatible = "arm,cortex-a9-gic";
38 #interrupt-cells = <3>;
39 interrupt-controller;
40 reg = <0x104810000x1000>, <0x10482000 0x2000>;
41 };
而在arch/arm/mach-exynos/mach-exynos5-dt.c中即含有:
95DT_MACHINE_START(EXYNOS5_DT, "SAMSUNGEXYNOS5 (Flattened Device Tree)")
96 /* Maintainer: Kukjin Kim
97 .init_irq =exynos5_init_irq,
98 .smp =smp_ops(exynos_smp_ops),
99 .map_io = exynos5250_dt_map_io,
100 .handle_irq = gic_handle_irq,
101 .init_machine =exynos5250_dt_machine_init,
102 .init_late =exynos_init_late,
103 .timer =&exynos4_timer,
104 .dt_compat =exynos5250_dt_compat,
105 .restart = exynos5_restart,
106MACHINE_END
4. SMP多核启动以及CPU热插拔驱动
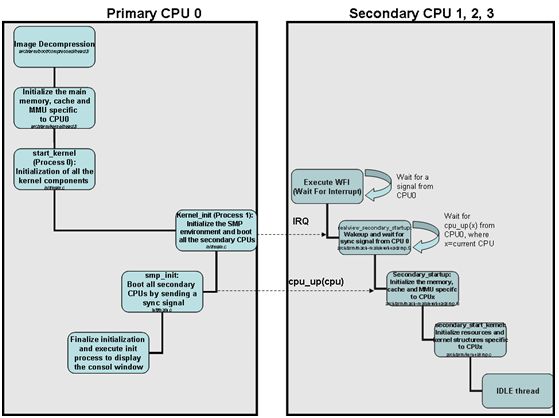
在Linux系统中,对于多核的ARM芯片而言,Bootrom代码中,CPU0会率先起来,引导Bootloader和Linux内核执行,而其他的核则在上电时Bootrom一般将自身置于WFI或者WFE状态,并等待CPU0给其发CPU核间中断(IPI)或事件(一般透过SEV指令)唤醒之。一个典型的启动过程如下图:
被CPU0唤醒的CPUn可以在运行过程中进行热插拔。譬如运行如下命令即可卸载CPU1并且将CPU1上的任务全部迁移到其他CPU:
# echo 0 >/sys/devices/system/cpu/cpu1/online
同样地,运行如下命令可以再次启动CPU1:
# echo 1 >/sys/devices/system/cpu/cpu1/online
之后CPU1会主动参与系统中各个CPU之间要运行任务的负载均衡工作。
CPU0唤醒其他 CPU的动作在内核中被封装为一个smp_operations的结构体,该结构体的成员如下:
[cpp] view plain copy
- 83struct smp_operations {
- 84#ifdef CONFIG_SMP
- 85 /*
- 86 * Setup the set of possible CPUs (via set_cpu_possible)
- 87 */
- 88 void (*smp_init_cpus)(void);
- 89 /*
- 90 * Initialize cpu_possible map, and enable coherency
- 91 */
- 92 void (*smp_prepare_cpus)(unsigned int max_cpus);
- 93
- 94 /*
- 95 * Perform platform specific initialisation of the specified CPU.
- 96 */
- 97 void (*smp_secondary_init)(unsigned int cpu);
- 98 /*
- 99 * Boot a secondary CPU, and assign it thespecified idle task.
- 100 * This also gives us the initial stack to use for this CPU.
- 101 */
- 102 int (*smp_boot_secondary)(unsigned int cpu, struct task_struct *idle);
- 103#ifdef CONFIG_HOTPLUG_CPU
- 104 int (*cpu_kill)(unsigned intcpu);
- 105 void (*cpu_die)(unsigned int cpu);
- 106 int (*cpu_disable)(unsigned intcpu);
- 107#endif
- 108#endif
- 109};
我们从arch/arm/mach-vexpress/v2m.c看到VEXPRESS电路板用到的smp_ops为vexpress_smp_ops:
666DT_MACHINE_START(VEXPRESS_DT,"ARM-Versatile Express")
667 .dt_compat = v2m_dt_match,
668 .smp =smp_ops(vexpress_smp_ops),
669 .map_io = v2m_dt_map_io,
670 .init_early =v2m_dt_init_early,
671 .init_irq = v2m_dt_init_irq,
672 .timer =&v2m_dt_timer,
673 .init_machine = v2m_dt_init,
674 .handle_irq = gic_handle_irq,
675 .restart = v2m_restart,
676MACHINE_END
透过arch/arm/mach-vexpress/platsmp.c的实现代码可以看出,smp_operations的成员函数smp_init_cpus() 即vexpress_smp_init_cpus()会探测SoC内CPU核的个数,并设置了核间通信的方式为gic_raise_softirq()。可见于vexpress_smp_init_cpus()中调用的vexpress_dt_smp_init_cpus():
103staticvoid __init vexpress_dt_smp_init_cpus(void)
104{
…
128 for (i = 0; i < ncores; ++i)
129 set_cpu_possible(i, true);
130
131 set_smp_cross_call(gic_raise_softirq);
132}
而smp_operations的成员函数smp_prepare_cpus()即vexpress_smp_prepare_cpus()则会透过v2m_flags_set(virt_to_phys(versatile_secondary_startup))设置其他CPU的启动地址为versatile_secondary_startup:
179staticvoid __init vexpress_smp_prepare_cpus(unsigned int max_cpus)
180{
181 …
189
190 /*
191 * Write the address of secondary startup into the
192 * system-wide flags register. The boot monitor waits
193 * until it receives a soft interrupt, and then the
194 * secondary CPU branches to this address.
195 */
196 v2m_flags_set(virt_to_phys(versatile_secondary_startup));
197}
注意这部分的具体实现方法是SoC相关的,由芯片的设计以及芯片内部的Bootrom决定。对于VEXPRESS来讲,设置方法如下:
139void__init v2m_flags_set(u32 data)
140{
141 writel(~0, v2m_sysreg_base + V2M_SYS_FLAGSCLR);
142 writel(data, v2m_sysreg_base + V2M_SYS_FLAGSSET);
143}
即填充v2m_sysreg_base +V2M_SYS_FLAGSCLR地址为0xFFFFFFFF,将其他CPU初始启动执行的指令地址填入v2m_sysreg_base +V2M_SYS_FLAGSSET。这2个地址属于芯片实现时候设定的。填入的CPUn的起始地址都透过virt_to_phys()转化为物理地址,因为此时CPUn的MMU尚未开启。
比较关键的是smp_operations的成员函数smp_boot_secondary(),它完成最终的CPUn的唤醒工作:
27static void __cpuinit write_pen_release(intval)
28{
29 pen_release = val;
30 smp_wmb();
31 __cpuc_flush_dcache_area((void *)&pen_release, sizeof(pen_release));
32 outer_clean_range(__pa(&pen_release), __pa(&pen_release + 1));
33}
59int __cpuinitversatile_boot_secondary(unsigned int cpu, struct task_struct *idle)
60{
61 unsigned long timeout;
62
63 /*
64 * Set synchronisation state between this boot processor
65 * and the secondary one
66 */
67 spin_lock(&boot_lock);
68
69 /*
70 * This is really belt and braces; we hold unintended secondary
71 * CPUs in the holding pen until we're ready for them. However,
72 * since we haven't sent them a soft interrupt, they shouldn't
73 * be there.
74 */
75 write_pen_release(cpu_logical_map(cpu));
76
77 /*
78 * Send the secondary CPU a soft interrupt, thereby causing
79 * the boot monitor to read the system wide flags register,
80 * and branch to the address found there.
81 */
82 gic_raise_softirq(cpumask_of(cpu), 0);
83
84 timeout = jiffies + (1 * HZ);
85 while (time_before(jiffies, timeout)) {
86 smp_rmb();
87 if (pen_release == -1)
88 break;
89
90 udelay(10);
91 }
92
93 /*
94 * now the secondary core is starting up let it run its
95 * calibrations, then wait for it to finish
96 */
97 spin_unlock(&boot_lock);
98
99 return pen_release != -1 ? -ENOSYS : 0;
100}
上述代码中高亮的部分首先会将pen_release变量设置为要唤醒的CPU核的CPU号cpu_logical_map(cpu),而后透过gic_raise_softirq(cpumask_of(cpu), 0)给CPUcpu发起0号IPI,这个时候,CPUcpu核会从前面smp_operations中的smp_prepare_cpus()成员函数即vexpress_smp_prepare_cpus()透过v2m_flags_set()设置的其他CPU核的起始地址versatile_secondary_startup开始执行,如果顺利的话,该CPU会将原先为正数的pen_release写为-1,以便CPU0从等待pen_release成为-1的循环中跳出。
versatile_secondary_startup实现于arch/arm/plat-versatile/headsmp.S,是一段汇编:
21ENTRY(versatile_secondary_startup)
22 mrc p15, 0, r0, c0, c0, 5
23 and r0, r0, #15
24 adr r4, 1f
25 ldmia r4, {r5, r6}
26 sub r4, r4, r5
27 add r6, r6, r4
28pen: ldr r7, [r6]
29 cmp r7, r0
30 bne pen
31
32 /*
33 * we've been released from the holding pen: secondary_stack
34 * should now contain the SVC stack for this core
35 */
36 b secondary_startup
37
38 .align
391: .long .
40 .long pen_release
41ENDPROC(versatile_secondary_startup)
第1段高亮的部分实际上是等待pen_release成为CPU0设置的cpu_logical_map(cpu),一般直接就成立了。第2段高亮的部分则调用到内核通用的secondary_startup()函数,经过一系列的初始化如MMU等,最终新的被唤醒的CPU将调用到smp_operations的smp_secondary_init()成员函数,对于本例为versatile_secondary_init():
37void __cpuinitversatile_secondary_init(unsigned int cpu)
38{
39 /*
40 * if any interrupts are already enabled for the primary
41 * core (e.g. timer irq), then they will not have been enabled
42 * for us: do so
43 */
44 gic_secondary_init(0);
45
46 /*
47 * let the primary processor know we're out of the
48 * pen, then head off into the C entry point
49 */
50 write_pen_release(-1);
51
52 /*
53 * Synchronise with the boot thread.
54 */
55 spin_lock(&boot_lock);
56 spin_unlock(&boot_lock);
57}
上述代码中高亮的那1行会将pen_release写为-1,于是CPU0还在执行的versatile_boot_secondary()函数中的如下循环就退出了:
85 while (time_before(jiffies, timeout)) {
86 smp_rmb();
87 if (pen_release == -1)
88 break;
89
90 udelay(10);
91 }
此后CPU0和新唤醒的其他CPU各自狂奔。整个系统在运行过程中会进行实时进程和正常进程的动态负载均衡。
CPU hotplug的实现也是芯片相关的,对于VEXPRESS而言,实现了smp_operations的cpu_die()成员函数即vexpress_cpu_die()。它会在进行CPUn的拔除操作时将CPUn投入低功耗的WFI状态,相关代码位于arch/arm/mach-vexpress/hotplug.c:
90void __ref vexpress_cpu_die(unsigned intcpu)
91{
92 int spurious = 0;
93
94 /*
95 * we're ready for shutdown now, so do it
96 */
97 cpu_enter_lowpower();
98 platform_do_lowpower(cpu, &spurious);
99
100 /*
101 * bring this CPU back into the world of cache
102 * coherency, and then restore interrupts
103 */
104 cpu_leave_lowpower();
105
106 if (spurious)
107 pr_warn("CPU%u: %uspurious wakeup calls\n", cpu, spurious);
108}
57static inline void platform_do_lowpower(unsignedint cpu, int *spurious)
58{
59 /*
60 * there is no power-control hardware on this platform, so all
61 * we can do is put the core into WFI; this is safe as the calling
62 * code will have already disabled interrupts
63 */
64 for (;;) {
65 wfi();
66
67 if (pen_release ==cpu_logical_map(cpu)) {
68 /*
69 * OK, proper wakeup,we're done
70 */
71 break;
72 }
73
74 /*
75 * Getting here, means that wehave come out of WFI without
76 * having been woken up - thisshouldn't happen
77 *
78 * Just note it happening -when we're woken, we can report
79 * its occurrence.
80 */
81 (*spurious)++;
82 }
83}
CPUn睡眠于wfi(),之后再次online的时候,又会因为CPU0给它发出的IPI而从wfi()函数返回继续执行,醒来时CPUn也判决了是否pen_release == cpu_logical_map(cpu)成立,以确定该次醒来确确实实是由CPU0唤醒的一次正常醒来。
5. DEBUG_LL和EARLY_PRINTK
在Linux启动的早期,console驱动还没有投入运行。当我们把Linux移植到一个新的SoC的时候,工程师一般非常需要早期就可以执行printk()功能以跟踪调试启动过程。内核的DEBUG_LL和EARLY_PRINTK选项为我们提供了这样的支持。而在Bootloader引导内核执行的bootargs中,则需要使能earlyprintk选项。
为了让DEBUG_LL和EARLY_PRINTK可以运行,Linux内核中需实现早期解压过程打印需要的putc()和后续的addruart、senduart和waituart等宏。以CSR SiRFprimaII为例,putc()的实现位于arch/arm/mach-prima2/include/mach/uncompress.h:
22static __inline__ void putc(char c)
23{
24 /*
25 * during kernel decompression, all mappings are flat:
26 * virt_addr == phys_addr
27 */
28 while (__raw_readl((void __iomem *)SIRFSOC_UART1_PA_BASE +SIRFSOC_UART_TXFIFO_STATUS)
29 &SIRFSOC_UART1_TXFIFO_FULL)
30 barrier();
31
32 __raw_writel(c, (void __iomem *)SIRFSOC_UART1_PA_BASE +SIRFSOC_UART_TXFIFO_DATA);
33}
由于解压过程中,MMU还没有初始化,所以这个时候的打印是直接往UART端口FIFO对应的物理地址丢打印字符。
addruart、senduart和waituart等宏的实现位于每个SoC对应的MACHINE代码目录的include/mach/debug-macro.S,SiRFprimaII的实现mach-prima2/include/mach/debug-macro.S如下:
12 .macro addruart, rp, rv, tmp
13 ldr \rp,=SIRFSOC_UART1_PA_BASE @physical
14 ldr \rv,=SIRFSOC_UART1_VA_BASE @ virtual
15 .endm
16
17 .macro senduart,rd,rx
18 str \rd, [\rx,#SIRFSOC_UART_TXFIFO_DATA]
19 .endm
20
21 .macro busyuart,rd,rx
22 .endm
23
24 .macro waituart,rd,rx
251001: ldr \rd, [\rx,#SIRFSOC_UART_TXFIFO_STATUS]
26 tst \rd,#SIRFSOC_UART1_TXFIFO_EMPTY
27 beq 1001b
28 .endm
其中的senduart完成了往UART的FIFO丢打印字符的过程。waituart则相当于一个流量握手,等待FIFO为空。这些宏最终会被内核的arch/arm/kernel/debug.S引用。
6. GPIO驱动
在drivers/gpio下实现了通用的基于gpiolib的GPIO驱动,其中定义了一个通用的用于描述底层GPIO控制器的gpio_chip结构体,并要求具体的SoC实现gpio_chip结构体的成员函数,最后透过gpiochip_add()注册gpio_chip。
gpio_chip结构体封装了底层的硬件的GPIO enable/disable等操作,它定义为:
94struct gpio_chip {
95 const char *label;
96 struct device *dev;
97 struct module *owner;
98
99 int (*request)(struct gpio_chip *chip,
100 unsigned offset);
101 void (*free)(struct gpio_chip *chip,
102 unsigned offset);
103
104 int (*direction_input)(struct gpio_chip *chip,
105 unsigned offset);
106 int (*get)(struct gpio_chip *chip,
107 unsigned offset);
108 int (*direction_output)(structgpio_chip *chip,
109 unsigned offset, int value);
110 int (*set_debounce)(struct gpio_chip *chip,
111 unsigned offset, unsigned debounce);
112
113 void (*set)(struct gpio_chip *chip,
114 unsigned offset, int value);
115
116 int (*to_irq)(struct gpio_chip *chip,
117 unsigned offset);
118
119 void (*dbg_show)(struct seq_file *s,
120 struct gpio_chip *chip);
121 int base;
122 u16 ngpio;
123 const char *const*names;
124 unsigned can_sleep:1;
125 unsigned exported:1;
126
127#if defined(CONFIG_OF_GPIO)
128 /*
129 * If CONFIG_OF is enabled, then all GPIOcontrollers described in the
130 * device tree automatically may have an OF translation
131 */
132 struct device_node *of_node;
133 int of_gpio_n_cells;
134 int (*of_xlate)(struct gpio_chip *gc,
135 const structof_phandle_args *gpiospec, u32 *flags);
136#endif
137};
透过这层封装,每个具体的要用到GPIO的设备驱动都使用通用的GPIO API来操作GPIO,这些API主要用于GPIO的申请、释放和设置:
intgpio_request(unsigned gpio, const char *label);
voidgpio_free(unsigned gpio);
intgpio_direction_input(unsigned gpio);
intgpio_direction_output(unsigned gpio, int value);
intgpio_set_debounce(unsigned gpio, unsigned debounce);
intgpio_get_value_cansleep(unsigned gpio);
voidgpio_set_value_cansleep(unsigned gpio, int value);
intgpio_request_one(unsigned gpio, unsigned long flags, const char *label);
intgpio_request_array(const struct gpio *array, size_t num);
voidgpio_free_array(const struct gpio *array, size_t num);
intdevm_gpio_request(struct device *dev, unsigned gpio, const char *label);
intdevm_gpio_request_one(struct device *dev, unsigned gpio,
unsigned long flags,const char *label);
voiddevm_gpio_free(struct device *dev, unsigned int gpio);
注意,内核中针对内存、IRQ、时钟、GPIO、pinctrl都有devm_开头的API,使用这部分API的时候,内核会有类似于Java资源自动回收机制,因此在代码中做出错处理时,无需释放相关的资源。
对于GPIO而言,特别值得一提的是,内核会创建/sys结点 /sys/class/gpio/gpioN/,透过它我们可以echo值从而改变GPIO的方向、设置和获取GPIO的值。
在拥有Device Tree支持的情况之下,我们可以透过Device Tree来描述某GPIO控制器提供的GPIO引脚被具体设备使用的情况。在GPIO控制器对应的结点中,需定义#gpio-cells 和gpio-controller属性,具体的设备结点则透过xxx-gpios属性来引用GPIO控制器结点及GPIO引脚。
如VEXPRESS电路板 DT文件arch/arm/boot/dts/vexpress-v2m.dtsi中拥有如下GPIO控制器结点:
73 v2m_sysreg:sysreg@00000 {
74 compatible ="arm,vexpress-sysreg";
75 reg = <0x000000x1000>;
76 gpio-controller;
77 #gpio-cells =<2>;
78 };
VEXPRESS电路板上的MMC控制器会使用该结点GPIO控制器提供的GPIO引脚,则具体的mmci@05000设备结点的会通过-gpios属性引用GPIO:
111 mmci@05000 {
112 compatible ="arm,pl180", "arm,primecell";
113 reg =<0x05000 0x1000>;
114 interrupts =<9 10>;
115 cd-gpios = <&v2m_sysreg 0 0>;
116 wp-gpios =<&v2m_sysreg 1 0>;
117 …
121 };
其中的cd-gpios用于SD/MMC卡的detection,而wp-gpios用于写保护,MMC主机控制器驱动会透过如下方法获取这2个GPIO,详见于drivers/mmc/host/mmci.c:
1220static void mmci_dt_populate_generic_pdata(struct device_node *np,
1221 structmmci_platform_data *pdata)
1222{
1223 int bus_width = 0;
1224
1225 pdata->gpio_wp =of_get_named_gpio(np, "wp-gpios", 0);
1226 pdata->gpio_cd =of_get_named_gpio(np, "cd-gpios", 0);
…
}
7. pinctrl驱动
许多SoC内部都包含pin控制器,通过pin控制器的寄存器,我们可以配置一个或者一组引脚的功能和特性。在软件上,Linux内核的pinctrl驱动可以操作pin控制器为我们完成如下工作:
§ 枚举并且命名pin控制器可控制的所有引脚;
§ 提供引脚复用的能力;
§ 提供配置引脚的能力,如驱动能力、上拉下拉、开漏(open drain)等。
pinctrl和引脚
在特定SoC的pinctrl驱动中,我们需要定义引脚。假设有一个PGA封装的芯片的引脚排布如下:
A B C D E F G H
8 o o o o o o o o
7 o o o o o o o o
6 o o o o o o o o
5 o o o o o o o o
4 o o o o o o o o
3 o o o o o o o o
2 o o o o o o o o
1 o o o o o o o o
在pinctrl驱动初始化的时候,需要向pinctrl子系统注册一个pinctrl_desc描述符,在该描述符中包含所有引脚的列表。可以通过如下代码来注册这个pin控制器并命名其所有引脚:
59#include
60
61const struct pinctrl_pin_descfoo_pins[] = {
62 PINCTRL_PIN(0, "A8"),
63 PINCTRL_PIN(1, "B8"),
64 PINCTRL_PIN(2, "C8"),
65 ...
66 PINCTRL_PIN(61, "F1"),
67 PINCTRL_PIN(62, "G1"),
68 PINCTRL_PIN(63, "H1"),
69};
70
71static struct pinctrl_descfoo_desc = {
72 .name = "foo",
73 .pins = foo_pins,
74 .npins = ARRAY_SIZE(foo_pins),
75 .maxpin = 63,
76 .owner = THIS_MODULE,
77};
78
79int __init foo_probe(void)
80{
81 struct pinctrl_dev *pctl;
82
83 pctl = pinctrl_register(&foo_desc,
84 if (IS_ERR(pctl))
85 pr_err("could not registerfoo pin driver\n");
86}
引脚组(pin group)
在pinctrl子系统中,支持将一组引脚绑定为同一功能。假设{ 0, 8, 16, 24 }这一组引脚承担SPI的功能,而{ 24, 25 }这一组引脚承担I2C接口功能。在驱动的代码中,需要体现这个分组关系,并且为这些分组实现pinctrl_ops的成员函数get_groups_count、get_groups_count和get_groups_count,将pinctrl_ops填充到前文pinctrl_desc的实例foo_desc中。
130#include
131
132struct foo_group {
133 const char *name;
134 const unsigned int *pins;
135 const unsigned num_pins;
136};
137
138static const unsigned int spi0_pins[] = { 0, 8, 16, 24 };
139static const unsigned int i2c0_pins[] = { 24, 25 };
140
141static const struct foo_group foo_groups[] = {
142 {
143 .name = "spi0_grp",
144 .pins = spi0_pins,
145 .num_pins =ARRAY_SIZE(spi0_pins),
146 },
147 {
148 .name = "i2c0_grp",
149 .pins = i2c0_pins,
150 .num_pins =ARRAY_SIZE(i2c0_pins),
151 },
152};
153
154
155static int foo_get_groups_count(struct pinctrl_dev *pctldev)
156{
157 return ARRAY_SIZE(foo_groups);
158}
159
160static const char *foo_get_group_name(struct pinctrl_dev *pctldev,
161 unsigned selector)
162{
163 return foo_groups[selector].name;
164}
165
166static int foo_get_group_pins(struct pinctrl_dev *pctldev, unsigned selector,
167 unsigned **const pins,
168 unsigned *const num_pins)
169{
170 *pins = (unsigned *) foo_groups[selector].pins;
171 *num_pins =foo_groups[selector].num_pins;
172 return 0;
173}
174
175static struct pinctrl_opsfoo_pctrl_ops = {
176 .get_groups_count =foo_get_groups_count,
177 .get_group_name = foo_get_group_name,
178 .get_group_pins = foo_get_group_pins,
179};
180
181
182static struct pinctrl_descfoo_desc = {
183 ...
184 .pctlops = &foo_pctrl_ops,
185};
get_groups_count()成员函数用于告知pinctrl子系统该SoC中合法的被选引脚组有多少个,而get_group_name()则提供引脚组的名字,get_group_pins()提供引脚组的引脚表。在设备驱动调用pinctrl通用API使能某一组引脚的对应功能时,pinctrl子系统的核心层会调用上述callback函数。
引脚配置
设备驱动有时候需要配置引脚,譬如可能把引脚设置为高阻或者三态(达到类似断连引脚的效果),或通过某阻值将引脚上拉/下拉以确保默认状态下引脚的电平状态。驱动中可以自定义相应板级引脚配置API的细节,譬如某设备驱动可能通过如下代码将某引脚上拉:
#include
ret= pin_config_set("foo-dev", "FOO_GPIO_PIN",PLATFORM_X_PULL_UP);
其中的PLATFORM_X_PULL_UP由特定的pinctrl驱动定义。在特定的pinctrl驱动中,需要实现完成这些配置所需要的callback函数(pinctrl_desc的confops成员函数):
222#include
223#include
224#include "platform_x_pindefs.h"
225
226static int foo_pin_config_get(struct pinctrl_dev *pctldev,
227 unsigned offset,
228 unsigned long *config)
229{
230 struct my_conftype conf;
231
232 ... Find setting for pin @ offset ...
233
234 *config = (unsigned long) conf;
235}
236
237static int foo_pin_config_set(struct pinctrl_dev *pctldev,
238 unsigned offset,
239 unsigned long config)
240{
241 struct my_conftype *conf = (structmy_conftype *) config;
242
243 switch (conf) {
244 case PLATFORM_X_PULL_UP:
245 ...
246 }
247 }
248}
249
250static int foo_pin_config_group_get (struct pinctrl_dev *pctldev,
251 unsigned selector,
252 unsigned long *config)
253{
254 ...
255}
256
257static int foo_pin_config_group_set (struct pinctrl_dev *pctldev,
258 unsigned selector,
259 unsigned long config)
260{
261 ...
262}
263
264static struct pinconf_opsfoo_pconf_ops = {
265 .pin_config_get = foo_pin_config_get,
266 .pin_config_set = foo_pin_config_set,
267 .pin_config_group_get =foo_pin_config_group_get,
268 .pin_config_group_set =foo_pin_config_group_set,
269};
270
271/* Pin config operations are handled by some pin controller */
272static struct pinctrl_descfoo_desc = {
273 ...
274 .confops = &foo_pconf_ops,
275};
其中的pin_config_group_get()、pin_config_group_set()针对的是可同时配置一个引脚组的状态情况,而pin_config_get()、pin_config_set()针对的则是单个引脚的配置。
与GPIO子系统的交互
pinctrl驱动中所覆盖的引脚可能同时可作为GPIO用,内核的GPIO子系统和pinctrl子系统本来是并行工作的,但是有时候需要交叉映射,这种情况下,需要在pinctrl驱动中告知pinctrl子系统核心层GPIO与底层pinctrl驱动所管理的引脚之间的映射关系。假设pinctrl驱动中定义的引脚32~47与gpio_chip实例chip_a的GPIO对应,引脚64~71与gpio_chip实例chip_b的GPIO对应,即映射关系为:
chip a:
- GPIO range :[32 .. 47]
- pinrange : [32 .. 47]
chip b:
- GPIO range :[48 .. 55]
- pinrange : [64 .. 71]
则在特定pinctrl驱动中可以透过如下代码注册2个GPIO范围:
305struct gpio_chip chip_a;
306struct gpio_chip chip_b;
307
308static struct pinctrl_gpio_range gpio_range_a = {
309 .name = "chip a",
310 .id = 0,
311 .base = 32,
312 .pin_base = 32,
313 .npins = 16,
314 .gc = &chip_a;
315};
316
317static struct pinctrl_gpio_range gpio_range_b = {
318 .name = "chip b",
319 .id = 0,
320 .base = 48,
321 .pin_base = 64,
322 .npins = 8,
323 .gc = &chip_b;
324};
325
326{
327 struct pinctrl_dev *pctl;
328 ...
329 pinctrl_add_gpio_range(pctl,&gpio_range_a);
330 pinctrl_add_gpio_range(pctl,&gpio_range_b);
331}
在基于内核gpiolib的GPIO驱动中,若设备驱动需进行GPIO申请gpio_request()和释放gpio_free(),GPIO驱动则会调用pinctrl子系统中的pinctrl_request_gpio()和pinctrl_free_gpio()通用API,pinctrl子系统会查找申请的GPIO和pin的映射关系,并确认引脚是否被其他复用功能所占用。与pinctrl子系统通用层pinctrl_request_gpio()和pinctrl_free_gpio()API对应,在底层的具体pinctrl驱动中,需要实现pinmux_ops结构体的gpio_request_enable()和gpio_disable_free()成员函数。
除了gpio_request_enable()和gpio_disable_free()成员函数外,pinmux_ops结构体主要还用来封装pinmux功能enable/disable的callback函数,下面可以看到它更多的细节。
引脚复用(pinmux)
pinctrl驱动中可处理引脚复用,它定义了FUNCTIONS(功能),驱动可以设置某FUNCTIONS的enable或者disable。各个FUNCTIONS联合起来组成一个一维数组,譬如{ spi0, i2c0, mmc0 }就描述了3个不同的FUNCTIONS。
一个特定的功能总是要求一些引脚组(pingroup)来完成,引脚组的数量为可以为1个或者多个。假设对前文所描述的PGA封装的SoC而言,如下图:
387
388 A B C D E F G H
389 +---+
390 8 | o | o o o o o o o
391 | |
392 7 | o | o o o o o o o
393 | |
394 6 | o | o o o o o o o
395 +---+---+
396 5 | o | o | o o o o o o
397 +---+---+ +---+
398 4 o o o o o o | o | o
399 | |
400 3 o o o o o o | o | o
401 | |
402 2 o o o o o o | o | o
403 +-------+-------+-------+---+---+
404 1 | o o| o o | o o | o | o |
405 +-------+-------+-------+---+---+
I2C功能由{ A5, B5 }引脚组成,而在定义引脚描述的pinctrl_pin_desc结构体实例foo_pins的时候,将它们的序号定义为了{ 24, 25 } ;而SPI功能则由可以由{ A8, A7, A6, A5 }和 { G4, G3, G2, G1 }, 也即{ 0, 8, 16, 24 }和{ 38, 46, 54, 62 }两个引脚组完成(注意在整个系统中,引脚组的名字不会重叠)。
由此,功能和引脚组的组合就可以决定一组引脚在系统里的作用,因此在设置某组引脚的作用时,pinctrl的核心层会将功能的序号以及引脚组的序号传递给底层pinctrl驱动中相关的callback函数。
在整个系统中,驱动或板级代码调用pinmux相关的API获取引脚后,会形成一个(pinctrl、使用引脚的设备、功能、引脚组)的映射关系,假设在某电路板上,将让spi0 设备使用pinctrl0的fspi0功能以及gspi0引脚组,让i2c0设备使用pinctrl0的fi2c0功能和gi2c0引脚组,我们将得到如下的映射关系:
502 {
503 {"map-spi0", spi0, pinctrl0, fspi0,gspi0},
504 {"map-i2c0", i2c0, pinctrl0,fi2c0, gi2c0}
505 }
pinctrl子系统的核心会保证每个引脚的排他性,因此一个引脚如果已经被某设备用掉了,而其他的设备又申请该引脚行驶其他的功能或GPIO,则pinctrl核心层会让该次申请失败。
特定pinctrl驱动中pinmux相关的代码主要处理如何enable/disable某一{功能,引脚组}的组合,譬如,当spi0设备申请pinctrl0的fspi0功能和gspi0引脚组以便将gspi0引脚组配置为SPI接口时,相关的callback被组织进一个pinmux_ops结构体,而该结构体的实例最终成为前文pinctrl_desc的pmxops成员:
562#include
563#include
564
565struct foo_group {
566 const char *name;
567 const unsigned int *pins;
568 const unsigned num_pins;
569};
570
571static const unsigned spi0_0_pins[] = { 0, 8, 16, 24 };
572static const unsigned spi0_1_pins[] = { 38, 46, 54, 62 };
573static const unsigned i2c0_pins[] = { 24, 25 };
574static const unsigned mmc0_1_pins[] = { 56, 57 };
575static const unsigned mmc0_2_pins[] = { 58, 59 };
576static const unsigned mmc0_3_pins[] = { 60, 61, 62, 63 };
577
578static const struct foo_group foo_groups[] = {
579 {
580 .name ="spi0_0_grp",
581 .pins = spi0_0_pins,
582 .num_pins =ARRAY_SIZE(spi0_0_pins),
583 },
584 {
585 .name ="spi0_1_grp",
586 .pins = spi0_1_pins,
587 .num_pins = ARRAY_SIZE(spi0_1_pins),
588 },
589 {
590 .name = "i2c0_grp",
591 .pins = i2c0_pins,
592 .num_pins =ARRAY_SIZE(i2c0_pins),
593 },
594 {
595 .name ="mmc0_1_grp",
596 .pins = mmc0_1_pins,
597 .num_pins =ARRAY_SIZE(mmc0_1_pins),
598 },
599 {
600 .name ="mmc0_2_grp",
601 .pins = mmc0_2_pins,
602 .num_pins =ARRAY_SIZE(mmc0_2_pins),
603 },
604 {
605 .name ="mmc0_3_grp",
606 .pins = mmc0_3_pins,
607 .num_pins =ARRAY_SIZE(mmc0_3_pins),
608 },
609};
610
611
612static int foo_get_groups_count(struct pinctrl_dev *pctldev)
613{
614 return ARRAY_SIZE(foo_groups);
615}
616
617static const char *foo_get_group_name(struct pinctrl_dev *pctldev,
618 unsigned selector)
619{
620 return foo_groups[selector].name;
621}
622
623static int foo_get_group_pins(struct pinctrl_dev *pctldev, unsigned selector,
624 unsigned **const pins,
625 unsigned *const num_pins)
626{
627 *pins = (unsigned *) foo_groups[selector].pins;
628 *num_pins =foo_groups[selector].num_pins;
629 return 0;
630}
631
632static struct pinctrl_ops foo_pctrl_ops = {
633 .get_groups_count =foo_get_groups_count,
634 .get_group_name = foo_get_group_name,
635 .get_group_pins = foo_get_group_pins,
636};
637
638struct foo_pmx_func {
639 const char *name;
640 const char * const *groups;
641 const unsigned num_groups;
642};
643
644static const char * const spi0_groups[] = { "spi0_0_grp","spi0_1_grp" };
645static const char * const i2c0_groups[] = { "i2c0_grp" };
646static const char * const mmc0_groups[] = { "mmc0_1_grp","mmc0_2_grp",
647 "mmc0_3_grp" };
648
649static const struct foo_pmx_func foo_functions[] = {
650 {
651 .name = "spi0",
652 .groups = spi0_groups,
653 .num_groups =ARRAY_SIZE(spi0_groups),
654 },
655 {
656 .name = "i2c0",
657 .groups = i2c0_groups,
658 .num_groups =ARRAY_SIZE(i2c0_groups),
659 },
660 {
661 .name = "mmc0",
662 .groups = mmc0_groups,
663 .num_groups =ARRAY_SIZE(mmc0_groups),
664 },
665};
666
667int foo_get_functions_count(struct pinctrl_dev *pctldev)
668{
669 return ARRAY_SIZE(foo_functions);
670}
671
672const char *foo_get_fname(struct pinctrl_dev *pctldev, unsigned selector)
673{
674 return foo_functions[selector].name;
675}
676
677static int foo_get_groups(struct pinctrl_dev *pctldev, unsigned selector,
678 const char * const**groups,
679 unsigned * constnum_groups)
680{
681 *groups = foo_functions[selector].groups;
682 *num_groups =foo_functions[selector].num_groups;
683 return 0;
684}
685
686int foo_enable(struct pinctrl_dev *pctldev, unsigned selector,
687 unsigned group)
688{
689 u8 regbit = (1 << selector + group);
690
691 writeb((readb(MUX)|regbit), MUX)
692 return 0;
693}
694
695void foo_disable(struct pinctrl_dev *pctldev, unsigned selector,
696 unsigned group)
697{
698 u8 regbit = (1 << selector +group);
699
700 writeb((readb(MUX) & ~(regbit)),MUX)
701 return 0;
702}
703
704 structpinmux_ops foo_pmxops = {
705 .get_functions_count =foo_get_functions_count,
706 .get_function_name = foo_get_fname,
707 .get_function_groups = foo_get_groups,
708 .enable = foo_enable,
709 .disable = foo_disable,
710};
711
712/* Pinmux operations are handled by some pin controller */
713static struct pinctrl_desc foo_desc = {
714 ...
715 .pctlops = &foo_pctrl_ops,
716 .pmxops = &foo_pmxops,
717};
718
具体的pinctrl、使用引脚的设备、功能、引脚组的映射关系,可以在板文件中透过定义pinctrl_map结构体的实例来展开,如:
828static struct pinctrl_map __initdata mapping[] = {
829 PIN_MAP_MUX_GROUP("foo-i2c.o", PINCTRL_STATE_DEFAULT,"pinctrl-foo", NULL, "i2c0"),
830};
PIN_MAP_MUX_GROUP是一个快捷的宏,用于赋值pinctrl_map的各个成员:
88#define PIN_MAP_MUX_GROUP(dev, state, pinctrl, grp, func) \
89 { \
90 .dev_name = dev, \
91 .name = state, \
92 .type =PIN_MAP_TYPE_MUX_GROUP, \
93 .ctrl_dev_name = pinctrl, \
94 .data.mux = { \
95 .group = grp, \
96 .function = func, \
97 }, \
98 }
99
当然,这种映射关系最好是在DeviceTree中透过结点的属性进行,具体的结点属性的定义方法依赖于具体的pinctrl驱动,最终在pinctrl驱动中透过pinctrl_ops结构体的.dt_node_to_map()成员函数读出属性并建立映射表。
又由于1个功能可能可由2个不同的引脚组实现,可能形成如下对于同1个功能有2个可选引脚组的pinctrl_map:
staticstruct pinctrl_map __initdata mapping[] = {
PIN_MAP_MUX_GROUP("foo-spi.0","spi0-pos-A", "pinctrl-foo", "spi0_0_grp", "spi0"),
PIN_MAP_MUX_GROUP("foo-spi.0","spi0-pos-B", "pinctrl-foo", "spi0_1_grp", "spi0"),
};
在运行时,我们可以透过类似的API去查找并设置位置A的引脚组行驶SPI接口的功能:
954 p = devm_pinctrl_get(dev);
955 s = pinctrl_lookup_state(p, "spi0-pos-A");
956 ret = pinctrl_select_state(p, s);
或者可以更加简单地使用:
p =devm_pinctrl_get_select(dev, "spi0-pos-A");
若想运行时切换位置A和B的引脚组行使SPI的接口功能,代码结构类似:
1163foo_probe()
1164{
1165 /* Setup */
1166 p = devm_pinctrl_get(&device);
1167 if (IS_ERR(p))
1168 ...
1169
1170 s1 = pinctrl_lookup_state(foo->p," spi0-pos-A");
1171 if (IS_ERR(s1))
1172 ...
1173
1174 s2 = pinctrl_lookup_state(foo->p," spi0-pos-B");
1175 if (IS_ERR(s2))
1176 ...
1177}
1178
1179foo_switch()
1180{
1181 /* Enable on position A */
1182 ret = pinctrl_select_state(s1);
1183 if (ret < 0)
1184 ...
1185
1186 ...
1187
1188 /* Enable on position B */
1189 ret = pinctrl_select_state(s2);
1190 if (ret < 0)
1191 ...
1192
1193 ...
1194}
pinctrl子系统中定义了pinctrl_get_select_default()以及有devm_前缀的devm_ pinctrl_get_select() API,许多驱动如drivers/i2c/busses/i2c-imx.c、drivers/leds/leds-gpio.c、drivers/spi/spi-imx.c、drivers/tty/serial/omap-serial.c、sound/soc/mxs/mxs-saif.c都是透过这一API来获取自己的引脚组的。xxx_get_select_default()最终会调用
pinctrl_get_select(dev,PINCTRL_STATE_DEFAULT);
其中PINCTRL_STATE_DEFAULT定义为"default",它描述了缺省状态下某设备的pinmux功能和引脚组映射情况。
8. clock驱动
在一个SoC中,晶振、PLL、divider和gate等会形成一个clock树形结构,在Linux 2.6中,也存有clk_get_rate()、clk_set_rate()、clk_get_parent()、clk_set_parent()等通用API,但是这些API由每个SoC单独实现,而且各个SoC供应商在实现方面的差异很大,于是内核增加了一个新的common clk框架以解决这个碎片化问题。之所以称为common clk,这个common主要体现在:
§ 统一的clk结构体,统一的定义于clk.h中的clk API,这些API会调用到统一的clk_ops中的callback函数;
这个统一的 clk结构体的定义如下:
struct clk {
const char *name;
const struct clk_ops *ops;
struct clk_hw *hw;
char **parent_names;
struct clk **parents;
struct clk *parent;
struct hlist_head children;
struct hlist_node child_node;
...
};
其中的clk_ops定义为:
struct clk_ops {
int (*prepare)(struct clk_hw *hw);
void (*unprepare)(struct clk_hw *hw);
int (*enable)(struct clk_hw *hw);
void (*disable)(struct clk_hw *hw);
int (*is_enabled)(struct clk_hw *hw);
unsigned long (*recalc_rate)(struct clk_hw *hw,
unsigned long parent_rate);
long (*round_rate)(struct clk_hw *hw,unsigned long,
unsigned long *);
int (*set_parent)(struct clk_hw *hw,u8 index);
u8 (*get_parent)(struct clk_hw *hw);
int (*set_rate)(struct clk_hw *hw,unsigned long);
void (*init)(struct clk_hw *hw);
};
§ 对于具体的SoC如何去实现针对自己SoC的clk驱动, 如何提供硬件特定的callback函数的方法也进行了统一。
在common的clk结构体中,clk_hw是联系clk_ops中callback函数和具体硬件细节的纽带,clk_hw中只包含common clk结构体的指针以及具体硬件的init数据:
structclk_hw {
struct clk *clk;
const struct clk_init_data *init;
};
其中的clk_init_data包含了具体时钟的name、可能的parent的name的列表parent_names、可能的parent数量num_parents等,实际上这些name的匹配对建立时钟间的父子关系功不可没:
136struct clk_init_data {
137 const char *name;
138 const struct clk_ops *ops;
139 const char **parent_names;
140 u8 num_parents;
141 unsigned long flags;
142};
从clk核心层到具体芯片clk驱动的调用顺序为:
clk_enable(clk);
è clk->ops->enable(clk->hw);
通用的clk API(如clk_enable)在调用底层的clk结构体的clk_ops的成员函数(如clk->ops->enable)时,会将clk->hw传递过去。
一般在具体的驱动中会定义针对特定clk(如foo)的结构体,该结构体中包含clk_hw成员以及硬件私有数据:
structclk_foo {
struct clk_hw hw;
... hardware specific data goes here ...
};
并定义to_clk_foo()宏以便通过clk_hw获取clk_foo:
#defineto_clk_foo(_hw) container_of(_hw, struct clk_foo, hw)
在针对clk_foo的clk_ops的callback函数中我们便可以透过clk_hw和to_clk_foo最终获得硬件私有数据并访问硬件读写寄存器以改变时钟的状态:
structclk_ops clk_foo_ops {
.enable = &clk_foo_enable;
.disable = &clk_foo_disable;
};
intclk_foo_enable(struct clk_hw *hw)
{
struct clk_foo *foo;
foo = to_clk_foo(hw);
... perform magic on foo ...
return 0;
};
在具体的clk驱动中,需要透过clk_register()以及它的变体注册硬件上所有的clk,通过clk_register_clkdev()注册clk与使用clk的设备之间的映射关系,也即进行clk和使用clk的设备之间的绑定,这2个函数的原型为:
struct clk *clk_register(struct device *dev, structclk_hw *hw);
int clk_register_clkdev(struct clk *clk, const char*con_id,
const char*dev_fmt, ...);
另外,针对不同的clk类型(如固定频率的clk、clk gate、clkdivider等),clk子系统又提供了几个快捷函数以完成clk_register()的过程:
struct clk *clk_register_fixed_rate(struct device*dev, const char *name,
const char *parent_name, unsigned long flags,
unsigned long fixed_rate);
struct clk *clk_register_gate(struct device *dev,const char *name,
const char *parent_name, unsigned long flags,
void __iomem *reg, u8 bit_idx,
u8 clk_gate_flags, spinlock_t *lock);
struct clk *clk_register_divider(struct device *dev,const char *name,
const char *parent_name, unsigned long flags,
void __iomem *reg, u8 shift, u8 width,
u8 clk_divider_flags, spinlock_t *lock);
以drivers/clk/clk-prima2.c为例,该驱动对应的芯片SiRFprimaII外围接了一个26MHz的晶振和一个32.768KHz供给的RTC的晶振,在26MHz晶振的后面又有3个PLL,当然PLL后面又接了更多的clk结点,则我们看到它的相关驱动代码形如:
staticunsigned long pll_clk_recalc_rate(struct clk_hw *hw,
unsigned long parent_rate)
{
unsigned long fin = parent_rate;
struct clk_pll *clk = to_pllclk(hw);
…
}
staticlong pll_clk_round_rate(struct clk_hw *hw, unsigned long rate,
unsigned long *parent_rate)
{
…
}
staticint pll_clk_set_rate(struct clk_hw *hw, unsigned long rate,
unsigned long parent_rate)
{
…
}
staticstruct clk_ops std_pll_ops = {
.recalc_rate = pll_clk_recalc_rate,
.round_rate = pll_clk_round_rate,
.set_rate = pll_clk_set_rate,
};
staticconst char *pll_clk_parents[] = {
"osc",
};
staticstruct clk_init_data clk_pll1_init = {
.name = "pll1",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_init_data clk_pll2_init = {
.name = "pll2",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_init_data clk_pll3_init = {
.name = "pll3",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_pll clk_pll1 = {
.regofs = SIRFSOC_CLKC_PLL1_CFG0,
.hw = {
.init = &clk_pll1_init,
},
};
staticstruct clk_pll clk_pll2 = {
.regofs = SIRFSOC_CLKC_PLL2_CFG0,
.hw = {
.init = &clk_pll2_init,
},
};
staticstruct clk_pll clk_pll3 = {
.regofs = SIRFSOC_CLKC_PLL3_CFG0,
.hw = {
.init = &clk_pll3_init,
},
};
void__init sirfsoc_of_clk_init(void)
{
…
/* These are always available (RTC and26MHz OSC)*/
clk = clk_register_fixed_rate(NULL,"rtc", NULL,
CLK_IS_ROOT, 32768);
BUG_ON(!clk);
clk = clk_register_fixed_rate(NULL,"osc", NULL,
CLK_IS_ROOT, 26000000);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll1.hw);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll2.hw);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll3.hw);
BUG_ON(!clk);
…
clk = clk_register(NULL, &clk_gps.hw);
BUG_ON(!clk);
clk_register_clkdev(clk, NULL,"a8010000.gps");
…
}
另外,目前内核更加倡导的方法是透过Device Tree来描述电路板上的clk树,以及clk和设备之间的绑定关系。通常我们需要在clk控制器的结点中定义#clock-cells属性,并且在clk驱动中透过of_clk_add_provider()注册clk控制器为一个clk树的提供者(provider),并建立系统中各个clk和index的映射表,如:
Clock ID
---------------------------
rtc 0
osc 1
pll1 2
pll2 3
pll3 4
mem 5
sys 6
security 7
dsp 8
gps 9
mf 10
…
在每个具体的设备中,对应的.dts结点上的clocks = <&clks index>属性指向其引用的clk控制器结点以及使用的clk的index,如:
gps@a8010000{
compatible ="sirf,prima2-gps";
reg = <0xa8010000 0x10000>;
interrupts = <7>;
clocks = <&clks 9>;
};
要特别强调的是,在具体的设备驱动中,一定要透过通用clk API来操作所有的clk,而不要直接透过读写clk控制器的寄存器来进行,这些API包括:
structclk *clk_get(struct device *dev, const char *id);
structclk *devm_clk_get(struct device *dev, const char *id);
intclk_enable(struct clk *clk);
intclk_prepare(struct clk *clk);
voidclk_unprepare(struct clk *clk);
voidclk_disable(struct clk *clk);
staticinline int clk_prepare_enable(struct clk *clk);
staticinline void clk_disable_unprepare(struct clk *clk);
unsignedlong clk_get_rate(struct clk *clk);
intclk_set_rate(struct clk *clk, unsigned long rate);
structclk *clk_get_parent(struct clk *clk);
intclk_set_parent(struct clk *clk, struct clk *parent);
值得一提的是,名称中含有prepare、unprepare字符串的API是内核后来才加入的,过去只有clk_enable和clk_disable。只有clk_enable和clk_disable带来的问题是,有时候,某些硬件的enable/disable clk可能引起睡眠使得enable/disable不能在原子上下文进行。加上prepare后,把过去的clk_enable分解成不可在原子上下文调用的clk_prepare(该函数可能睡眠)和可以在原子上下文调用的clk_enable。而clk_prepare_enable则同时完成prepare和enable的工作,当然也只能在可能睡眠的上下文调用该API。
9. dmaengine驱动
dmaengine是一套通用的DMA驱动框架,该框架为具体使用DMA通道的设备驱动提供了一套统一的API,而且也定义了具体的DMA控制器实现这一套API的方法。
对于使用DMA引擎的设备驱动而言,发起DMA传输的过程变得整洁,如在sound子系统的sound/soc/soc-dmaengine-pcm.c中,会使用dmaengine进行周期性的DMA传输,相关的代码如下:
staticint dmaengine_pcm_prepare_and_submit(struct snd_pcm_substream *substream)
{
struct dmaengine_pcm_runtime_data*prtd = substream_to_prtd(substream);
struct dma_chan *chan =prtd->dma_chan;
struct dma_async_tx_descriptor *desc;
enum dma_transfer_direction direction;
unsigned long flags = DMA_CTRL_ACK;
…
desc = dmaengine_prep_dma_cyclic(chan,
substream->runtime->dma_addr,
snd_pcm_lib_buffer_bytes(substream),
snd_pcm_lib_period_bytes(substream), direction, flags);
…
desc->callback =dmaengine_pcm_dma_complete;
desc->callback_param = substream;
prtd->cookie =dmaengine_submit(desc);
}
intsnd_dmaengine_pcm_trigger(struct snd_pcm_substream *substream, int cmd)
{
struct dmaengine_pcm_runtime_data *prtd= substream_to_prtd(substream);
int ret;
switch (cmd) {
case SNDRV_PCM_TRIGGER_START:
ret =dmaengine_pcm_prepare_and_submit(substream);
…
dma_async_issue_pending(prtd->dma_chan);
break;
case SNDRV_PCM_TRIGGER_RESUME:
case SNDRV_PCM_TRIGGER_PAUSE_RELEASE:
dmaengine_resume(prtd->dma_chan);
break;
…
}
这个过程可分为三步:
1. 透过dmaengine_prep_dma_xxx初始化一个具体的DMA传输描述符(本例中为结构体dma_async_tx_descriptor的实例desc)
2. 透过dmaengine_submit()将该描述符插入dmaengine驱动的传输队列
3. 在需要传输的时候透过类似dma_async_issue_pending()的调用启动对应DMA通道上的传输。
也就是不管具体硬件的DMA控制器是如何实现的,在软件意义上都抽象为了设置DMA描述符、插入DMA描述符入传输队列以及启动DMA传输的过程。
除了前文用到的dmaengine_prep_dma_cyclic()用于定义周期性DMA传输外,还有一组类似API可以定义各种类型的DMA描述符,特定硬件的DMA驱动的主要工作就是实现封装在内核dma_device结构体中的这些个成员函数(定义在include/linux/dmaengine.h头文件中):
500/**
501 * struct dma_device - info on the entitysupplying DMA services
…
518 * @device_prep_dma_memcpy: prepares a memcpyoperation
519 * @device_prep_dma_xor: prepares a xoroperation
520 * @device_prep_dma_xor_val: prepares a xorvalidation operation
521 * @device_prep_dma_pq: prepares a pqoperation
522 * @device_prep_dma_pq_val: prepares apqzero_sum operation
523 * @device_prep_dma_memset: prepares a memsetoperation
524 * @device_prep_dma_interrupt: prepares an endof chain interrupt operation
525 * @device_prep_slave_sg: prepares a slave dmaoperation
526 * @device_prep_dma_cyclic: prepare a cyclicdma operation suitable for audio.
527 * The function takes a buffer of size buf_len. The callback function will
528 * be called after period_len bytes have been transferred.
529 * @device_prep_interleaved_dma: Transferexpression in a generic way.
…
*/
在底层的dmaengine驱动实例中,一般会组织好这个dma_device结构体,并透过dma_async_device_register()注册之。在其各个成员函数中,一般会透过链表来管理DMA描述符的运行、free等队列。
dma_device的成员函数device_issue_pending()用于实现DMA传输开启的功能,当每次DMA传输完成后,驱动中注册的中断服务程序的顶半部或者底半部会调用DMA描述符dma_async_tx_descriptor中设置的callback函数,该callback函数来源于使用DMA通道的设备驱动。
典型的dmaengine驱动可见于drivers/dma/目录下的sirf-dma.c、omap-dma.c、pl330.c、ste_dma40.c等。
10. 总结
移植Linux到全新的SMP SoC上,需在底层提供定时器节拍、中断控制器、SMP启动、GPIO、clock、pinctrl等功能,这些底层的功能被封装好后,其他设备驱动只能调用内核提供的通用API。这良好地体现了内核的分层设计。即驱动都调用与硬件无关的通用API,而这些API的底层实现则更多的是填充内核规整好的callback函数。
Linux内核社区针对pinctrl、clock、GPIO、DMA提供独立的子系统,既给具体的设备驱动提供了统一了API,进一步提高了设备驱动的跨平台性,又为每个SoC和machine实现这些底层的API定义好了条条框框,从而可以最大程度上避免每个硬件实现过多的冗余代码。
顶
13
踩
0
- 上一篇ARM Linux 3.x的设备树(Device Tree)
- 下一篇分享《Essential Linux Device Drivers》中文版高清电子版
我的同类文章
Linux Kernel开发(14)
- •Network write system call latency2016-01-17阅读274
- •ARM Linux 3.x的设备树(Device Tree)2013-01-01阅读113532
- •Linux RT(1)-硬实时Linux(RT-Preempt Patch)在PC上的编译、使用和测试2012-10-03阅读8246
- •让busybox里的free命令可以显示page cache2012-03-26阅读3978
- •Linux内核最新的连续内存分配器(CMA)——避免预留大块内存2012-03-01阅读14891
- •Linux电源管理系统架构和驱动(1)-Linux电源管理全局架构2015-02-21阅读3449
- •Linux RT(2)-硬实时Linux(RT-Preempt Patch)的中断线程化2012-10-19阅读5899
- •Essential Linux Device Driver附录A . Linux汇编2012-09-17阅读2826
- •Linux gdb调试器用法全面解析2012-03-22阅读27845
更多文章
猜你在找
I2C通信详解-1.12.ARM裸机第十二部分
SDRAM和重定位relocate-1.5.ARM裸机第五部分
定时器、看门狗和RTC-1.9.ARM裸机第九部分
内核的配置和编译原理-uboot和系统移植第15部分
C++ DirectX 游戏开发初级教程
查看评论
3楼 webster_yang 2015-09-10 22:18发表 [回复]

宋老师,您好。请问下,能否推荐或写一篇博客,u-boot和kernel的版本推进历程,关键版本之间的区别?我以前零散地学习了一些,发现都是以前的,现在看新版本的代码。很希望能从大体上学习下版本推荐以及主要区别...非常感谢!
2楼 doom66151 2013-09-05 02:27发表 [回复]

讲的不错。
不过题目写的太大了。一个SOC的移植,除了这些gpio和clk、dma,还有很多:各种总线控制器,显示,音频,协处理器方面等。内核还会继续进化,将共有的抽象出来。
1楼 jillpotti 2013-04-14 21:17发表 [回复]

宋老师,您好,有个问题想请教您,关于页表的
帖子地址
http://bbs.chinaunix.net/forum.php?mod=viewthread&tid=4076686&page=1&extra=#pid23840654
麻烦了
:)
发表评论
- 用 户 名:
- special00
- 评论内容:
* 以上用户言论只代表其个人观点,不代表CSDN网站的观点或立场
核心技术类目
全部主题 Hadoop AWS 移动游戏 Java Android iOS Swift 智能硬件 Docker OpenStack VPN Spark ERP IE10Eclipse CRM JavaScript 数据库 Ubuntu NFC WAP jQuery BI HTML5 Spring Apache .NET API HTML SDK IISFedora XML LBS Unity Splashtop UML components Windows Mobile Rails QEMU KDE Cassandra CloudStack FTCcoremail OPhone CouchBase 云计算 iOS6 Rackspace Web App SpringSide Maemo Compuware 大数据 aptech PerlTornado Ruby Hibernate ThinkPHP HBase Pure Solr Angular Cloud Foundry Redis Scala Django Bootstrap
- 个人资料

21cnbao
-
- 访问:631910次
- 积分:6233
- 等级:

- 排名:第2270名
- 原创:56篇
- 转载:2篇
- 译文:3篇
- 评论:450条
- 新浪微博
- 文章搜索
- 文章分类
- Android系统架构(31)
- Linux Driver开发(18)
- Linux Kernel开发(15)
- Linux Userspace开发(4)
- 技术人生(2)
- 文章存档
- 2016年01月(1)
- 2015年08月(1)
- 2015年04月(1)
- 2015年02月(1)
- 2014年10月(2)
展开
- 阅读排行
- ARM Linux 3.x的设备树(Device Tree)(113736)
- Linux芯片级移植与底层驱动(基于3.7.4内核)(31822)
- Linux gdb调试器用法全面解析(27892)
- Service与Android系统实现(1)-- 应用程序里的Service(26973)
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新(21346)
- Android应用程序开发以及背后的设计思想深度剖析(1)(19166)
- 分享《Linux设备驱动开发详解》第2版高清电子版(14931)
- Linux内核最新的连续内存分配器(CMA)——避免预留大块内存(14915)
- Android架构纵横谈之——软件自愈能力 (1)(14076)
- 分享《Essential Linux Device Drivers》中文版高清电子版(13068)
- 评论排行
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新(93)
- ARM Linux 3.x的设备树(Device Tree)(49)
- 《Linux设备驱动开发详解》第3版现隆重征求读者创作意见(44)
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言(43)
- Android架构纵横谈之——软件自愈能力 (1)(18)
- 分享《Linux设备驱动开发详解》第2版高清电子版(17)
- Android应用程序开发以及背后的设计思想深度剖析(3)(16)
- 炼狱与逐光——我的十杰博客获奖感言(16)
- 宋宝华ABC(14)
- Android架构纵横谈之——软件自愈能力 (2)(13)
- 推荐文章
-
- *正方形数量问题终极解答
- *几种软负载均衡策略分析
- *浅谈Storm流式处理框架
- *阿里2016实习offer五面经验与总结
- *Android移动应用开发中常见的经验技巧总结
- * 关于前端开发的思考
- 最新评论
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新
a661110: 入手后发现没有光盘,上云盘后发现p1和p2居然都是压缩包,每个好几G...然而我只需要代码...心累...
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新
a661110: 入手后发现没有光盘,上云盘后发现p1和p2居然都是压缩包,每个好几G...然而我只需要代码...心累...
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言
elicec: 很喜欢博主的文章,刚刚用豆约翰博客备份专家备份了您的全部博文。
- Linux电源管理系统架构和驱动(1)-Linux电源管理全局架构
elicec: 很喜欢博主的文章,刚刚用豆约翰博客备份专家备份了您的全部博文。
- ARM Linux 3.x的设备树(Device Tree)
21cnbao: @qq_14964095:书上说地非常清楚, compatible匹配或者别名匹配。
- ARM Linux 3.x的设备树(Device Tree)
qq_14964095: 请教一下,以前注册设备和注册驱动的名字相同,才能probe生成设备节点,那么在使用设备树注册设备以后...
- ARM Linux 3.x的设备树(Device Tree)
Eliot_shao: 设备驱动总线模型并没有变,搞了MTK平台才发现设备树这个东西,此文收益匪浅,谢谢~
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言
21cnbao: @summer_xxtt:电子版的问题确实很恼火,我这其实也没有电子版,出版社也不给我。已经很多人给...
- ARM Linux 3.x的设备树(Device Tree)
Wit-Z-Joy: 后面的对比加深了理解
- ARM Linux 3.x的设备树(Device Tree)
Wit-Z-Joy: 新手学驱动看设备树云里雾里
公司简介|招贤纳士|广告服务|银行汇款帐号|联系方式|版权声明|法律顾问|问题报告|合作伙伴|论坛反馈
网站客服杂志客服微博客服[email protected]400-600-2320|北京创新乐知信息技术有限公司 版权所有|江苏乐知网络技术有限公司 提供商务支持
京 ICP 证 09002463 号|Copyright © 1999-2014, CSDN.NET, All Rights Reserved 
宋宝华的blog
Linux Consultant
- 目录视图
- 摘要视图
- 订阅
2016攒课第二期之你听课我买单,快来攒你想听的课! 2016大数据应用调查 2016年7月微软MVP申请开始了!
Linux芯片级移植与底层驱动(基于3.7.4内核)
2013-01-26 18:40 31834人阅读 评论(4) 收藏 举报
分类:
Linux Kernel开发(14)
版权声明:本文为博主原创文章,未经博主允许不得转载。
目录(?)[+]
宋宝华 BarrySong <[email protected]>
新浪微博: @宋宝华Barry
1. SoC Linux底层驱动的组成和现状
为了让Linux在一个全新的ARM SoC上运行,需要提供大量的底层支撑,如定时器节拍、中断控制器、SMP启动、CPU hotplug以及底层的GPIO、clock、pinctrl和DMA硬件的封装等。定时器节拍、中断控制器、SMP启动和CPU hotplug这几部分相对来说没有像早期GPIO、clock、pinctrl和DMA的实现那么杂乱,基本上有个固定的套路。定时器节拍为Linux基于时间片的调度机制以及内核和用户空间的定时器提供支撑,中断控制器的驱动则使得Linux内核的工程师可以直接调用local_irq_disable()、disable_irq()等通用的中断API,而SMP启动支持则用于让SoC内部的多个CPU核都投入运行,CPU hotplug则运行运行时挂载或拔除CPU。这些工作,在Linux 3.7内核中,进行了良好的层次划分和架构设计。
在GPIO、clock、pinctrl和DMA驱动方面,Linux 2.6时代,内核已或多或少有GPIO、clock等底层驱动的架构,但是核心层的代码太薄弱,各SoC对这些基础设施实现方面存在巨大差异,而且每个SoC仍然需要实现大量的代码。pinctrl和DMA则最为混乱,几乎各家公司都定义了自己的独特的实现和API。
社区必须改变这种局面,于是内核社区在2011~2012年进行了如下工作,这些工作在目前的3.7内核中基本准备就绪:
§ ST-Ericsson的工程师Linus Walleij提供了新的pinctrl驱动架构,内核新增加一个drivers/pinctrl目录,支撑SoC上的引脚复用,各个SoC的实现代码统一放入该目录;
§ TI的工程师Mike Turquette提供了common clk框架,让具体SoC实现clk_ops成员函数并通过clk_register、clk_register_clkdev注册时钟源以及源与设备对应关系,具体的clock驱动都统一迁移到drivers/clk目录;
§ 建议各SoC统一采用dmaengine架构实现DMA驱动,该架构提供了通用的DMA通道API如dmaengine_prep_slave_single()、dmaengine_submit()等,要求SoC实现dma_device的成员函数 ,实现代码统一放入drivers/dma目录;
§ 在GPIO方面,drivers/gpio下的gpiolib已能与新的pinctrl完美共存,实现引脚的GPIO和其他功能之间的复用,具体的SoC只需实现通用的gpio_chip结构体的成员函数。
经过以上工作,基本上就把芯片底层的基础架构方面的驱动的架构统一了,实现方法也统一了。另外,目前GPIO、clock、pinmux等功能都能良好的进行Device Tree的映射处理,譬如我们可以方面的在.dts中定义一个设备要的时钟、pinmux引脚以及GPIO。
除了上述基础设施以外,在将Linux移植入新的SoC过程中,工程师常常强烈依赖于早期的printk功能,内核则提供了相关的DEBUG_LL和EARLY_PRINTK支持,只需要SoC提供商实现少量的callback或宏。
本文主要对上述各个组成部分进行架构上的剖析以及关键的实现部分的实例分析,以求完整归纳将Linux移植入新SoC的主要工作。本文基于3.7.4内核。
2. 用于操作系统节拍的timer驱动
Linux 2.6的早期(2.6.21之前)基于tick设计,一般SoC公司在将Linux移植到自己的芯片上的时候,会从芯片内部找一个定时器,并将该定时器配置会HZ的频率,在每个时钟节拍到来时,调用ARM Linux内核核心层的timer_tick()函数,从而引发系统里的一系列行为。如2.6.17中arch/arm/mach-s3c2410/time.c的做法是:
127/*
128 * IRQ handler for the timer
129 */
130static irqreturn_t
131s3c2410_timer_interrupt(int irq, void*dev_id, struct pt_regs *regs)
132{
133 write_seqlock(&xtime_lock);
134 timer_tick(regs);
135 write_sequnlock(&xtime_lock);
136 return IRQ_HANDLED;
137}
138
139static struct irqaction s3c2410_timer_irq ={
140 .name = "S3C2410Timer Tick",
141 .flags = SA_INTERRUPT | SA_TIMER,
142 .handler =s3c2410_timer_interrupt,
143};
252staticvoid __init s3c2410_timer_init (void)
253{
254 s3c2410_timer_setup();
255 setup_irq(IRQ_TIMER4, &s3c2410_timer_irq);
256}
257
当前Linux多采用tickless方案,并支持高精度定时器,内核的配置一般会使能NO_HZ(即tickless,或者说动态tick)和HIGH_RES_TIMERS。要强调的是tickless并不是说系统中没有时钟节拍了,而是说这个节拍不再像以前那样,周期性地产生。Tickless意味着,根据系统的运行情况,以事件驱动的方式动态决定下一个tick在何时发生。如果画一个时间轴,周期节拍的系统tick中断发生的时序看起来如下:
而NO_HZ的Linux看起来则是,2次定时器中断发生的时间间隔可长可短:
在当前的Linux系统中,SoC底层的timer被实现为一个clock_event_device和clocksource形式的驱动。在clock_event_device结构体中,实现其set_mode()和set_next_event()成员函数;在clocksource结构体中,主要实现read()成员函数。而定时器中断服务程序中,不再调用timer_tick(),而是调用clock_event_device的event_handler()成员函数。一个典型的SoC的底层tick定时器驱动形如:
61static irqreturn_t xxx_timer_interrupt(intirq, void *dev_id)
62{
63 struct clock_event_device *ce = dev_id;
65 …
70 ce->event_handler(ce);
71
72 return IRQ_HANDLED;
73}
74
75/* read 64-bit timer counter */
76static cycle_t xxx_timer_read(structclocksource *cs)
77{
78 u64 cycles;
79
80 /* read the 64-bit timer counter */
81 cycles = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_HI);
83 cycles = (cycles << 32) | readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
84
85 return cycles;
86}
87
88static int xxx_timer_set_next_event(unsignedlongdelta,
89 struct clock_event_device *ce)
90{
91 unsigned long now, next;
92
93 writel_relaxed(XXX_TIMER_LATCH_BIT, xxx_timer_base + XXX_TIMER_LATCH);
94 now = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
95 next = now + delta;
96 writel_relaxed(next, xxx_timer_base + SIRFSOC_TIMER_MATCH_0);
97 writel_relaxed(XXX_TIMER_LATCH_BIT, xxx_timer_base + XXX_TIMER_LATCH);
98 now = readl_relaxed(xxx_timer_base + XXX_TIMER_LATCHED_LO);
99
100 return next - now > delta ? -ETIME : 0;
101}
102
103static void xxx_timer_set_mode(enumclock_event_mode mode,
104 struct clock_event_device *ce)
105{
107 switch (mode) {
108 case CLOCK_EVT_MODE_PERIODIC:
109 …
111 case CLOCK_EVT_MODE_ONESHOT:
112 …
114 case CLOCK_EVT_MODE_SHUTDOWN:
115 …
117 case CLOCK_EVT_MODE_UNUSED:
118 case CLOCK_EVT_MODE_RESUME:
119 break;
120 }
121}
144static struct clock_event_device xxx_clockevent= {
145 .name = "xxx_clockevent",
146 .rating = 200,
147 .features = CLOCK_EVT_FEAT_ONESHOT,
148 .set_mode = xxx_timer_set_mode,
149 .set_next_event = xxx_timer_set_next_event,
150};
151
152static struct clocksource xxx_clocksource ={
153 .name = "xxx_clocksource",
154 .rating = 200,
155 .mask = CLOCKSOURCE_MASK(64),
156 .flags = CLOCK_SOURCE_IS_CONTINUOUS,
157 .read = xxx_timer_read,
158 .suspend = xxx_clocksource_suspend,
159 .resume = xxx_clocksource_resume,
160};
161
162static struct irqaction xxx_timer_irq = {
163 .name = "xxx_tick",
164 .flags = IRQF_TIMER,
165 .irq = 0,
166 .handler = xxx_timer_interrupt,
167 .dev_id = &xxx_clockevent,
168};
169
176static void __init xxx_clockevent_init(void)
177{
178 clockevents_calc_mult_shift(&xxx_clockevent, CLOCK_TICK_RATE, 60);
179
180 xxx_clockevent.max_delta_ns =
181 clockevent_delta2ns(-2, &xxx_clockevent);
182 xxx_clockevent.min_delta_ns =
183 clockevent_delta2ns(2, &xxx_clockevent);
184
185 xxx_clockevent.cpumask = cpumask_of(0);
186 clockevents_register_device(&xxx_clockevent);
187}
188
189/* initialize the kernel jiffy timer source*/
190static void __init xxx_timer_init(void)
191{
192 …
214
215 BUG_ON(clocksource_register_hz(&xxx_clocksource, CLOCK_TICK_RATE));
218
219 BUG_ON(setup_irq(xxx_timer_irq.irq,&xxx_timer_irq));
220
221 xxx_clockevent_init();
222}
249struct sys_timer xxx_timer = {
250 .init = xxx_timer_init,
251};
上述代码中,我们特别关注其中的如下函数:
clock_event_device的set_next_event 成员函数xxx_timer_set_next_event()
该函数的delta参数是Linux内核传递给底层定时器的一个差值,它的含义是下一次tick中断产生的硬件定时器中计数器counter的值相对于当前counter的差值。我们在该函数中将硬件定时器设置为在“当前counter计数值” + delta的时刻产生下一次tick中断。xxx_clockevent_init()函数中设置了可接受的最小和最大delta值对应的纳秒数,即xxx_clockevent.min_delta_ns和xxx_clockevent.max_delta_ns。
clocksource 的read成员函数xxx_timer_read()
该函数可读取出从开机以来到当前时刻定时器计数器已经走过的值,无论有没有设置计数器达到某值的时候产生中断,硬件的计数总是在进行的。因此,该函数给Linux系统提供了一个底层的准确的参考时间。
定时器的中断服务程序xxx_timer_interrupt()
在该中断服务程序中,直接调用clock_event_device的event_handler()成员函数,event_handler()成员函数的具体工作也是Linux内核根据Linux内核配置和运行情况自行设置的。
clock_event_device的set_mode成员函数 xxx_timer_set_mode()
用于设置定时器的模式以及resume和shutdown等功能,目前一般采用ONESHOT模式,即一次一次产生中断。当然新版的Linux也可以使用老的周期性模式,如果内核编译的时候未选择NO_HZ,该底层的timer驱动依然可以为内核的运行提供支持。
这些函数的结合,使得ARM Linux内核底层所需要的时钟得以运行。下面举一个典型的场景,假定定时器的晶振时钟频率为1MHz(即计数器每加1等于1us),应用程序透过nanosleep() API睡眠100us,内核会据此换算出下一次定时器中断的delta值为100,并间接调用到xxx_timer_set_next_event()去设置硬件让其在100us后产生中断。100us后,中断产生,xxx_timer_interrupt()被调用,event_handler()会间接唤醒睡眠的进程导致nanosleep()函数返回,从而用户进程继续。
这里特别要强调的是,对于多核处理器来说,一般的做法是给每个核分配一个独立的定时器,各个核根据自身的运行情况动态设置自己时钟中断发生的时刻。看看我们说运行的电脑的local timer中断即知:
barry@barry-VirtualBox:~$cat /proc/interrupts
CPU0 CPU1 CPU2 CPU3
…
20: 945 0 0 0 IO-APIC-fasteoi vboxguest
21: 4456 0 0 21592 IO-APIC-fasteoi ahci, Intel 82801AA-ICH
22: 26 0 0 0 IO-APIC-fasteoi ohci_hcd:usb2
NMI: 0 0 0 0 Non-maskable interrupts
LOC: 177279 177517 177146 177139 Local timer interrupts
SPU: 0 0 0 0 Spurious interrupts
PMI: 0 0 0 0 Performance monitoring
…
而比较低效率的方法则是只给CPU0提供定时器,由CPU0将定时器中断透过IPI(InterProcessor Interrupt,处理器间中断)广播到其他核。对于ARM来讲,1号IPIIPI_TIMER就是来负责这个广播的,从arch/arm/kernel/smp.c可以看出:
62enum ipi_msg_type {
63 IPI_WAKEUP,
64 IPI_TIMER,
65 IPI_RESCHEDULE,
66 IPI_CALL_FUNC,
67 IPI_CALL_FUNC_SINGLE,
68 IPI_CPU_STOP,
69 };
3. 中断控制器驱动
在Linux内核中,各个设备驱动可以简单地调用request_irq()、enable_irq()、disable_irq()、local_irq_disable()、local_irq_enable()等通用API完成中断申请、使能、禁止等功能。在将Linux移植到新的SoC时,芯片供应商需要提供该部分API的底层支持。
local_irq_disable()、local_irq_enable()的实现与具体中断控制器无关,对于ARMv6以上的体系架构而言,是直接调用CPSID/CPSIE指令进行,而对于ARMv6以前的体系结构,则是透过MRS、MSR指令来读取和设置ARM的CPSR寄存器。由此可见,local_irq_disable()、local_irq_enable()针对的并不是外部的中断控制器,而是直接让CPU本身不响应中断请求。相关的实现位于arch/arm/include/asm/irqflags.h:
[cpp] view plain copy
- 11#if __LINUX_ARM_ARCH__ >= 6
- 12
- 13static inline unsigned longarch_local_irq_save(void)
- 14{
- 15 unsigned long flags;
- 16
- 17 asm volatile(
- 18 " mrs %0, cpsr @ arch_local_irq_save\n"
- 19 " cpsid i"
- 20 : "=r" (flags) : :"memory", "cc");
- 21 return flags;
- 22}
- 23
- 24static inline voidarch_local_irq_enable(void)
- 25{
- 26 asm volatile(
- 27 " cpsie i @ arch_local_irq_enable"
- 28 :
- 29 :
- 30 : "memory","cc");
- 31}
- 32
- 33static inline voidarch_local_irq_disable(void)
- 34{
- 35 asm volatile(
- 36 " cpsid i @ arch_local_irq_disable"
- 37 :
- 38 :
- 39 : "memory","cc");
- 40}
- 44#else
- 45
- 46/*
- 47 * Save the current interrupt enable state& disable IRQs
- 48 */
- 49static inline unsigned longarch_local_irq_save(void)
- 50{
- 51 unsigned long flags, temp;
- 52
- 53 asm volatile(
- 54 " mrs %0, cpsr @ arch_local_irq_save\n"
- 55 " orr %1, %0, #128\n"
- 56 " msr cpsr_c, %1"
- 57 : "=r" (flags),"=r" (temp)
- 58 :
- 59 : "memory","cc");
- 60 return flags;
- 61}
- 62
- 63/*
- 64 * Enable IRQs
- 65 */
- 66static inline voidarch_local_irq_enable(void)
- 67{
- 68 unsigned long temp;
- 69 asm volatile(
- 70 " mrs %0, cpsr @ arch_local_irq_enable\n"
- 71 " bic %0, %0, #128\n"
- 72 " msr cpsr_c, %0"
- 73 : "=r" (temp)
- 74 :
- 75 : "memory","cc");
- 76}
- 77
- 78/*
- 79 * Disable IRQs
- 80 */
- 81static inline voidarch_local_irq_disable(void)
- 82{
- 83 unsigned long temp;
- 84 asm volatile(
- 85 " mrs %0, cpsr @arch_local_irq_disable\n"
- 86 " orr %0, %0, #128\n"
- 87 " msr cpsr_c, %0"
- 88 : "=r" (temp)
- 89 :
- 90 : "memory","cc");
- 91}
- 92 #endif
与local_irq_disable()和local_irq_enable()不同,disable_irq()、enable_irq()针对的则是外部的中断控制器。在内核中,透过irq_chip结构体来描述中断控制器。该结构体内部封装了中断mask、unmask、ack等成员函数,其定义于include/linux/irq.h:
[cpp] view plain copy
- 303structirq_chip {
- 304 const char *name;
- 305 unsigned int (*irq_startup)(structirq_data *data);
- 306 void (*irq_shutdown)(struct irq_data *data);
- 307 void (*irq_enable)(struct irq_data *data);
- 308 void (*irq_disable)(struct irq_data *data);
- 309
- 310 void (*irq_ack)(struct irq_data *data);
- 311 void (*irq_mask)(structirq_data *data);
- 312 void (*irq_mask_ack)(struct irq_data *data);
- 313 void (*irq_unmask)(struct irq_data *data);
- 314 void (*irq_eoi)(struct irq_data *data);
- 315
- 316 int (*irq_set_affinity)(struct irq_data *data, const struct cpumask *dest,bool force);
- 317 int (*irq_retrigger)(struct irq_data *data);
- 318 int (*irq_set_type)(struct irq_data *data,unsigned int flow_type);
- 319 int (*irq_set_wake)(struct irq_data *data, unsigned int on);
- 334};
各个芯片公司会将芯片内部的中断控制器实现为irq_chip驱动的形式。受限于中断控制器硬件的能力,这些成员函数并不一定需要全部实现,有时候只需要实现其中的部分函数即可。譬如drivers/pinctrl/pinctrl-sirf.c驱动中的
[cpp] view plain copy
- 1438staticstruct irq_chip sirfsoc_irq_chip = {
- 1439 .name = "sirf-gpio-irq",
- 1440 .irq_ack = sirfsoc_gpio_irq_ack,
- 1441 .irq_mask = sirfsoc_gpio_irq_mask,
- 1442 .irq_unmask = sirfsoc_gpio_irq_unmask,
- 1443 .irq_set_type = sirfsoc_gpio_irq_type,
- 1444};
我们只实现了其中的ack、mask、unmask和set_type成员函数,ack函数用于清中断,mask、unmask用于中断屏蔽和取消中断屏蔽、set_type则用于配置中断的触发方式,如高电平、低电平、上升沿、下降沿等。至于enable_irq()的时候,虽然没有实现irq_enable成员函数,但是内核会间接调用到irq_unmask成员函数,这点从kernel/irq/chip.c可以看出:
[cpp] view plain copy
- 192voidirq_enable(struct irq_desc *desc)
- 193{
- 194 irq_state_clr_disabled(desc);
- 195 if (desc->irq_data.chip->irq_enable)
- 196 desc->irq_data.chip->irq_enable(&desc->irq_data);
- 197 else
- 198 desc->irq_data.chip->irq_unmask(&desc->irq_data);
- 199 irq_state_clr_masked(desc);
- 200}
在芯片内部,中断控制器可能不止1个,多个中断控制器之间还很可能是级联的。举个例子,假设芯片内部有一个中断控制器,支持32个中断源,其中有4个来源于GPIO控制器外围的4组GPIO,每组GPIO上又有32个中断(许多芯片的GPIO控制器也同时是一个中断控制器),其关系如下图:
那么,一般来讲,在实际操作中,gpio0_0——gpio0_31这些引脚本身在第1级会使用中断号28,而这些引脚本身的中断号在实现GPIO控制器对应的irq_chip驱动时,我们又会把它映射到Linux系统的32——63号中断。同理,gpio1_0——gpio1_31这些引脚本身在第1级会使用中断号29,而这些引脚本身的中断号在实现GPIO控制器对应的irq_chip驱动时,我们又会把它映射到Linux系统的64——95号中断,以此类推。对于中断号的使用者而言,无需看到这种2级映射关系。如果某设备想申请gpio1_0这个引脚对应的中断,它只需要申请64号中断即可。这个关系图看起来如下:
还是以drivers/pinctrl/pinctrl-sirf.c的irq_chip部分为例,我们对于每组GPIO都透过irq_domain_add_legacy()添加了相应的irq_domain,每组GPIO的中断号开始于SIRFSOC_GPIO_IRQ_START + i *SIRFSOC_GPIO_BANK_SIZE,而每组GPIO本身占用的第1级中断控制器的中断号则为bank->parent_irq,我们透过irq_set_chained_handler()设置了第1级中断发生的时候,会调用链式IRQ处理函数sirfsoc_gpio_handle_irq():
1689 bank->domain =irq_domain_add_legacy(np, SIRFSOC_GPIO_BANK_SIZE,
1690 SIRFSOC_GPIO_IRQ_START+ i * SIRFSOC_GPIO_BANK_SIZE, 0,
1691 &sirfsoc_gpio_irq_simple_ops, bank);
1692
1693 if (!bank->domain) {
1694 pr_err("%s: Failedto create irqdomain\n", np->full_name);
1695 err = -ENOSYS;
1696 goto out;
1697 }
1698
1699 irq_set_chained_handler(bank->parent_irq, sirfsoc_gpio_handle_irq);
1700 irq_set_handler_data(bank->parent_irq, bank);
而在sirfsoc_gpio_handle_irq()函数的入口出调用chained_irq_enter()暗示自身进入链式IRQ处理,在函数体内判决具体的GPIO中断,并透过generic_handle_irq()调用到最终的外设驱动中的中断服务程序,最后调用chained_irq_exit()暗示自身退出链式IRQ处理:
1446staticvoid sirfsoc_gpio_handle_irq(unsigned int irq, struct irq_desc *desc)
1447{
1448 …
1454 chained_irq_enter(chip, desc);
1456 …
1477 generic_handle_irq(first_irq + idx);
1478 …
1484 chained_irq_exit(chip, desc);
1485}
很多中断控制器的寄存器定义呈现出简单的规律,如有一个mask寄存器,其中每1位可屏蔽1个中断等,这种情况下,我们无需实现1个完整的irq_chip驱动,可以使用内核提供的通用irq_chip驱动架构irq_chip_generic,这样只需要实现极少量的代码,如arch/arm/mach-prima2/irq.c中,注册CSRSiRFprimaII内部中断控制器的代码仅为:
26static __init void
27sirfsoc_alloc_gc(void __iomem *base,unsigned int irq_start, unsigned int num)
28{
29 struct irq_chip_generic *gc;
30 struct irq_chip_type *ct;
31
32 gc = irq_alloc_generic_chip("SIRFINTC", 1, irq_start, base,handle_level_irq);
33 ct = gc->chip_types;
34
35 ct->chip.irq_mask = irq_gc_mask_clr_bit;
36 ct->chip.irq_unmask = irq_gc_mask_set_bit;
37 ct->regs.mask = SIRFSOC_INT_RISC_MASK0;
38
39 irq_setup_generic_chip(gc, IRQ_MSK(num), IRQ_GC_INIT_MASK_CACHE,IRQ_NOREQUEST, 0);
40}
特别值得一提的是,目前多数主流ARM芯片,内部的一级中断控制器都使用了ARM公司的GIC,我们几乎不需要实现任何代码,只需要在Device Tree中添加相关的结点并将gic_handle_irq()填入MACHINE的handle_irq成员。
如在arch/arm/boot/dts/exynos5250.dtsi即含有:
36 gic:interrupt-controller@10481000 {
37 compatible = "arm,cortex-a9-gic";
38 #interrupt-cells = <3>;
39 interrupt-controller;
40 reg = <0x104810000x1000>, <0x10482000 0x2000>;
41 };
而在arch/arm/mach-exynos/mach-exynos5-dt.c中即含有:
95DT_MACHINE_START(EXYNOS5_DT, "SAMSUNGEXYNOS5 (Flattened Device Tree)")
96 /* Maintainer: Kukjin Kim
97 .init_irq =exynos5_init_irq,
98 .smp =smp_ops(exynos_smp_ops),
99 .map_io = exynos5250_dt_map_io,
100 .handle_irq = gic_handle_irq,
101 .init_machine =exynos5250_dt_machine_init,
102 .init_late =exynos_init_late,
103 .timer =&exynos4_timer,
104 .dt_compat =exynos5250_dt_compat,
105 .restart = exynos5_restart,
106MACHINE_END
4. SMP多核启动以及CPU热插拔驱动
在Linux系统中,对于多核的ARM芯片而言,Bootrom代码中,CPU0会率先起来,引导Bootloader和Linux内核执行,而其他的核则在上电时Bootrom一般将自身置于WFI或者WFE状态,并等待CPU0给其发CPU核间中断(IPI)或事件(一般透过SEV指令)唤醒之。一个典型的启动过程如下图:
被CPU0唤醒的CPUn可以在运行过程中进行热插拔。譬如运行如下命令即可卸载CPU1并且将CPU1上的任务全部迁移到其他CPU:
# echo 0 >/sys/devices/system/cpu/cpu1/online
同样地,运行如下命令可以再次启动CPU1:
# echo 1 >/sys/devices/system/cpu/cpu1/online
之后CPU1会主动参与系统中各个CPU之间要运行任务的负载均衡工作。
CPU0唤醒其他 CPU的动作在内核中被封装为一个smp_operations的结构体,该结构体的成员如下:
[cpp] view plain copy
- 83struct smp_operations {
- 84#ifdef CONFIG_SMP
- 85 /*
- 86 * Setup the set of possible CPUs (via set_cpu_possible)
- 87 */
- 88 void (*smp_init_cpus)(void);
- 89 /*
- 90 * Initialize cpu_possible map, and enable coherency
- 91 */
- 92 void (*smp_prepare_cpus)(unsigned int max_cpus);
- 93
- 94 /*
- 95 * Perform platform specific initialisation of the specified CPU.
- 96 */
- 97 void (*smp_secondary_init)(unsigned int cpu);
- 98 /*
- 99 * Boot a secondary CPU, and assign it thespecified idle task.
- 100 * This also gives us the initial stack to use for this CPU.
- 101 */
- 102 int (*smp_boot_secondary)(unsigned int cpu, struct task_struct *idle);
- 103#ifdef CONFIG_HOTPLUG_CPU
- 104 int (*cpu_kill)(unsigned intcpu);
- 105 void (*cpu_die)(unsigned int cpu);
- 106 int (*cpu_disable)(unsigned intcpu);
- 107#endif
- 108#endif
- 109};
我们从arch/arm/mach-vexpress/v2m.c看到VEXPRESS电路板用到的smp_ops为vexpress_smp_ops:
666DT_MACHINE_START(VEXPRESS_DT,"ARM-Versatile Express")
667 .dt_compat = v2m_dt_match,
668 .smp =smp_ops(vexpress_smp_ops),
669 .map_io = v2m_dt_map_io,
670 .init_early =v2m_dt_init_early,
671 .init_irq = v2m_dt_init_irq,
672 .timer =&v2m_dt_timer,
673 .init_machine = v2m_dt_init,
674 .handle_irq = gic_handle_irq,
675 .restart = v2m_restart,
676MACHINE_END
透过arch/arm/mach-vexpress/platsmp.c的实现代码可以看出,smp_operations的成员函数smp_init_cpus() 即vexpress_smp_init_cpus()会探测SoC内CPU核的个数,并设置了核间通信的方式为gic_raise_softirq()。可见于vexpress_smp_init_cpus()中调用的vexpress_dt_smp_init_cpus():
103staticvoid __init vexpress_dt_smp_init_cpus(void)
104{
…
128 for (i = 0; i < ncores; ++i)
129 set_cpu_possible(i, true);
130
131 set_smp_cross_call(gic_raise_softirq);
132}
而smp_operations的成员函数smp_prepare_cpus()即vexpress_smp_prepare_cpus()则会透过v2m_flags_set(virt_to_phys(versatile_secondary_startup))设置其他CPU的启动地址为versatile_secondary_startup:
179staticvoid __init vexpress_smp_prepare_cpus(unsigned int max_cpus)
180{
181 …
189
190 /*
191 * Write the address of secondary startup into the
192 * system-wide flags register. The boot monitor waits
193 * until it receives a soft interrupt, and then the
194 * secondary CPU branches to this address.
195 */
196 v2m_flags_set(virt_to_phys(versatile_secondary_startup));
197}
注意这部分的具体实现方法是SoC相关的,由芯片的设计以及芯片内部的Bootrom决定。对于VEXPRESS来讲,设置方法如下:
139void__init v2m_flags_set(u32 data)
140{
141 writel(~0, v2m_sysreg_base + V2M_SYS_FLAGSCLR);
142 writel(data, v2m_sysreg_base + V2M_SYS_FLAGSSET);
143}
即填充v2m_sysreg_base +V2M_SYS_FLAGSCLR地址为0xFFFFFFFF,将其他CPU初始启动执行的指令地址填入v2m_sysreg_base +V2M_SYS_FLAGSSET。这2个地址属于芯片实现时候设定的。填入的CPUn的起始地址都透过virt_to_phys()转化为物理地址,因为此时CPUn的MMU尚未开启。
比较关键的是smp_operations的成员函数smp_boot_secondary(),它完成最终的CPUn的唤醒工作:
27static void __cpuinit write_pen_release(intval)
28{
29 pen_release = val;
30 smp_wmb();
31 __cpuc_flush_dcache_area((void *)&pen_release, sizeof(pen_release));
32 outer_clean_range(__pa(&pen_release), __pa(&pen_release + 1));
33}
59int __cpuinitversatile_boot_secondary(unsigned int cpu, struct task_struct *idle)
60{
61 unsigned long timeout;
62
63 /*
64 * Set synchronisation state between this boot processor
65 * and the secondary one
66 */
67 spin_lock(&boot_lock);
68
69 /*
70 * This is really belt and braces; we hold unintended secondary
71 * CPUs in the holding pen until we're ready for them. However,
72 * since we haven't sent them a soft interrupt, they shouldn't
73 * be there.
74 */
75 write_pen_release(cpu_logical_map(cpu));
76
77 /*
78 * Send the secondary CPU a soft interrupt, thereby causing
79 * the boot monitor to read the system wide flags register,
80 * and branch to the address found there.
81 */
82 gic_raise_softirq(cpumask_of(cpu), 0);
83
84 timeout = jiffies + (1 * HZ);
85 while (time_before(jiffies, timeout)) {
86 smp_rmb();
87 if (pen_release == -1)
88 break;
89
90 udelay(10);
91 }
92
93 /*
94 * now the secondary core is starting up let it run its
95 * calibrations, then wait for it to finish
96 */
97 spin_unlock(&boot_lock);
98
99 return pen_release != -1 ? -ENOSYS : 0;
100}
上述代码中高亮的部分首先会将pen_release变量设置为要唤醒的CPU核的CPU号cpu_logical_map(cpu),而后透过gic_raise_softirq(cpumask_of(cpu), 0)给CPUcpu发起0号IPI,这个时候,CPUcpu核会从前面smp_operations中的smp_prepare_cpus()成员函数即vexpress_smp_prepare_cpus()透过v2m_flags_set()设置的其他CPU核的起始地址versatile_secondary_startup开始执行,如果顺利的话,该CPU会将原先为正数的pen_release写为-1,以便CPU0从等待pen_release成为-1的循环中跳出。
versatile_secondary_startup实现于arch/arm/plat-versatile/headsmp.S,是一段汇编:
21ENTRY(versatile_secondary_startup)
22 mrc p15, 0, r0, c0, c0, 5
23 and r0, r0, #15
24 adr r4, 1f
25 ldmia r4, {r5, r6}
26 sub r4, r4, r5
27 add r6, r6, r4
28pen: ldr r7, [r6]
29 cmp r7, r0
30 bne pen
31
32 /*
33 * we've been released from the holding pen: secondary_stack
34 * should now contain the SVC stack for this core
35 */
36 b secondary_startup
37
38 .align
391: .long .
40 .long pen_release
41ENDPROC(versatile_secondary_startup)
第1段高亮的部分实际上是等待pen_release成为CPU0设置的cpu_logical_map(cpu),一般直接就成立了。第2段高亮的部分则调用到内核通用的secondary_startup()函数,经过一系列的初始化如MMU等,最终新的被唤醒的CPU将调用到smp_operations的smp_secondary_init()成员函数,对于本例为versatile_secondary_init():
37void __cpuinitversatile_secondary_init(unsigned int cpu)
38{
39 /*
40 * if any interrupts are already enabled for the primary
41 * core (e.g. timer irq), then they will not have been enabled
42 * for us: do so
43 */
44 gic_secondary_init(0);
45
46 /*
47 * let the primary processor know we're out of the
48 * pen, then head off into the C entry point
49 */
50 write_pen_release(-1);
51
52 /*
53 * Synchronise with the boot thread.
54 */
55 spin_lock(&boot_lock);
56 spin_unlock(&boot_lock);
57}
上述代码中高亮的那1行会将pen_release写为-1,于是CPU0还在执行的versatile_boot_secondary()函数中的如下循环就退出了:
85 while (time_before(jiffies, timeout)) {
86 smp_rmb();
87 if (pen_release == -1)
88 break;
89
90 udelay(10);
91 }
此后CPU0和新唤醒的其他CPU各自狂奔。整个系统在运行过程中会进行实时进程和正常进程的动态负载均衡。
CPU hotplug的实现也是芯片相关的,对于VEXPRESS而言,实现了smp_operations的cpu_die()成员函数即vexpress_cpu_die()。它会在进行CPUn的拔除操作时将CPUn投入低功耗的WFI状态,相关代码位于arch/arm/mach-vexpress/hotplug.c:
90void __ref vexpress_cpu_die(unsigned intcpu)
91{
92 int spurious = 0;
93
94 /*
95 * we're ready for shutdown now, so do it
96 */
97 cpu_enter_lowpower();
98 platform_do_lowpower(cpu, &spurious);
99
100 /*
101 * bring this CPU back into the world of cache
102 * coherency, and then restore interrupts
103 */
104 cpu_leave_lowpower();
105
106 if (spurious)
107 pr_warn("CPU%u: %uspurious wakeup calls\n", cpu, spurious);
108}
57static inline void platform_do_lowpower(unsignedint cpu, int *spurious)
58{
59 /*
60 * there is no power-control hardware on this platform, so all
61 * we can do is put the core into WFI; this is safe as the calling
62 * code will have already disabled interrupts
63 */
64 for (;;) {
65 wfi();
66
67 if (pen_release ==cpu_logical_map(cpu)) {
68 /*
69 * OK, proper wakeup,we're done
70 */
71 break;
72 }
73
74 /*
75 * Getting here, means that wehave come out of WFI without
76 * having been woken up - thisshouldn't happen
77 *
78 * Just note it happening -when we're woken, we can report
79 * its occurrence.
80 */
81 (*spurious)++;
82 }
83}
CPUn睡眠于wfi(),之后再次online的时候,又会因为CPU0给它发出的IPI而从wfi()函数返回继续执行,醒来时CPUn也判决了是否pen_release == cpu_logical_map(cpu)成立,以确定该次醒来确确实实是由CPU0唤醒的一次正常醒来。
5. DEBUG_LL和EARLY_PRINTK
在Linux启动的早期,console驱动还没有投入运行。当我们把Linux移植到一个新的SoC的时候,工程师一般非常需要早期就可以执行printk()功能以跟踪调试启动过程。内核的DEBUG_LL和EARLY_PRINTK选项为我们提供了这样的支持。而在Bootloader引导内核执行的bootargs中,则需要使能earlyprintk选项。
为了让DEBUG_LL和EARLY_PRINTK可以运行,Linux内核中需实现早期解压过程打印需要的putc()和后续的addruart、senduart和waituart等宏。以CSR SiRFprimaII为例,putc()的实现位于arch/arm/mach-prima2/include/mach/uncompress.h:
22static __inline__ void putc(char c)
23{
24 /*
25 * during kernel decompression, all mappings are flat:
26 * virt_addr == phys_addr
27 */
28 while (__raw_readl((void __iomem *)SIRFSOC_UART1_PA_BASE +SIRFSOC_UART_TXFIFO_STATUS)
29 &SIRFSOC_UART1_TXFIFO_FULL)
30 barrier();
31
32 __raw_writel(c, (void __iomem *)SIRFSOC_UART1_PA_BASE +SIRFSOC_UART_TXFIFO_DATA);
33}
由于解压过程中,MMU还没有初始化,所以这个时候的打印是直接往UART端口FIFO对应的物理地址丢打印字符。
addruart、senduart和waituart等宏的实现位于每个SoC对应的MACHINE代码目录的include/mach/debug-macro.S,SiRFprimaII的实现mach-prima2/include/mach/debug-macro.S如下:
12 .macro addruart, rp, rv, tmp
13 ldr \rp,=SIRFSOC_UART1_PA_BASE @physical
14 ldr \rv,=SIRFSOC_UART1_VA_BASE @ virtual
15 .endm
16
17 .macro senduart,rd,rx
18 str \rd, [\rx,#SIRFSOC_UART_TXFIFO_DATA]
19 .endm
20
21 .macro busyuart,rd,rx
22 .endm
23
24 .macro waituart,rd,rx
251001: ldr \rd, [\rx,#SIRFSOC_UART_TXFIFO_STATUS]
26 tst \rd,#SIRFSOC_UART1_TXFIFO_EMPTY
27 beq 1001b
28 .endm
其中的senduart完成了往UART的FIFO丢打印字符的过程。waituart则相当于一个流量握手,等待FIFO为空。这些宏最终会被内核的arch/arm/kernel/debug.S引用。
6. GPIO驱动
在drivers/gpio下实现了通用的基于gpiolib的GPIO驱动,其中定义了一个通用的用于描述底层GPIO控制器的gpio_chip结构体,并要求具体的SoC实现gpio_chip结构体的成员函数,最后透过gpiochip_add()注册gpio_chip。
gpio_chip结构体封装了底层的硬件的GPIO enable/disable等操作,它定义为:
94struct gpio_chip {
95 const char *label;
96 struct device *dev;
97 struct module *owner;
98
99 int (*request)(struct gpio_chip *chip,
100 unsigned offset);
101 void (*free)(struct gpio_chip *chip,
102 unsigned offset);
103
104 int (*direction_input)(struct gpio_chip *chip,
105 unsigned offset);
106 int (*get)(struct gpio_chip *chip,
107 unsigned offset);
108 int (*direction_output)(structgpio_chip *chip,
109 unsigned offset, int value);
110 int (*set_debounce)(struct gpio_chip *chip,
111 unsigned offset, unsigned debounce);
112
113 void (*set)(struct gpio_chip *chip,
114 unsigned offset, int value);
115
116 int (*to_irq)(struct gpio_chip *chip,
117 unsigned offset);
118
119 void (*dbg_show)(struct seq_file *s,
120 struct gpio_chip *chip);
121 int base;
122 u16 ngpio;
123 const char *const*names;
124 unsigned can_sleep:1;
125 unsigned exported:1;
126
127#if defined(CONFIG_OF_GPIO)
128 /*
129 * If CONFIG_OF is enabled, then all GPIOcontrollers described in the
130 * device tree automatically may have an OF translation
131 */
132 struct device_node *of_node;
133 int of_gpio_n_cells;
134 int (*of_xlate)(struct gpio_chip *gc,
135 const structof_phandle_args *gpiospec, u32 *flags);
136#endif
137};
透过这层封装,每个具体的要用到GPIO的设备驱动都使用通用的GPIO API来操作GPIO,这些API主要用于GPIO的申请、释放和设置:
intgpio_request(unsigned gpio, const char *label);
voidgpio_free(unsigned gpio);
intgpio_direction_input(unsigned gpio);
intgpio_direction_output(unsigned gpio, int value);
intgpio_set_debounce(unsigned gpio, unsigned debounce);
intgpio_get_value_cansleep(unsigned gpio);
voidgpio_set_value_cansleep(unsigned gpio, int value);
intgpio_request_one(unsigned gpio, unsigned long flags, const char *label);
intgpio_request_array(const struct gpio *array, size_t num);
voidgpio_free_array(const struct gpio *array, size_t num);
intdevm_gpio_request(struct device *dev, unsigned gpio, const char *label);
intdevm_gpio_request_one(struct device *dev, unsigned gpio,
unsigned long flags,const char *label);
voiddevm_gpio_free(struct device *dev, unsigned int gpio);
注意,内核中针对内存、IRQ、时钟、GPIO、pinctrl都有devm_开头的API,使用这部分API的时候,内核会有类似于Java资源自动回收机制,因此在代码中做出错处理时,无需释放相关的资源。
对于GPIO而言,特别值得一提的是,内核会创建/sys结点 /sys/class/gpio/gpioN/,透过它我们可以echo值从而改变GPIO的方向、设置和获取GPIO的值。
在拥有Device Tree支持的情况之下,我们可以透过Device Tree来描述某GPIO控制器提供的GPIO引脚被具体设备使用的情况。在GPIO控制器对应的结点中,需定义#gpio-cells 和gpio-controller属性,具体的设备结点则透过xxx-gpios属性来引用GPIO控制器结点及GPIO引脚。
如VEXPRESS电路板 DT文件arch/arm/boot/dts/vexpress-v2m.dtsi中拥有如下GPIO控制器结点:
73 v2m_sysreg:sysreg@00000 {
74 compatible ="arm,vexpress-sysreg";
75 reg = <0x000000x1000>;
76 gpio-controller;
77 #gpio-cells =<2>;
78 };
VEXPRESS电路板上的MMC控制器会使用该结点GPIO控制器提供的GPIO引脚,则具体的mmci@05000设备结点的会通过-gpios属性引用GPIO:
111 mmci@05000 {
112 compatible ="arm,pl180", "arm,primecell";
113 reg =<0x05000 0x1000>;
114 interrupts =<9 10>;
115 cd-gpios = <&v2m_sysreg 0 0>;
116 wp-gpios =<&v2m_sysreg 1 0>;
117 …
121 };
其中的cd-gpios用于SD/MMC卡的detection,而wp-gpios用于写保护,MMC主机控制器驱动会透过如下方法获取这2个GPIO,详见于drivers/mmc/host/mmci.c:
1220static void mmci_dt_populate_generic_pdata(struct device_node *np,
1221 structmmci_platform_data *pdata)
1222{
1223 int bus_width = 0;
1224
1225 pdata->gpio_wp =of_get_named_gpio(np, "wp-gpios", 0);
1226 pdata->gpio_cd =of_get_named_gpio(np, "cd-gpios", 0);
…
}
7. pinctrl驱动
许多SoC内部都包含pin控制器,通过pin控制器的寄存器,我们可以配置一个或者一组引脚的功能和特性。在软件上,Linux内核的pinctrl驱动可以操作pin控制器为我们完成如下工作:
§ 枚举并且命名pin控制器可控制的所有引脚;
§ 提供引脚复用的能力;
§ 提供配置引脚的能力,如驱动能力、上拉下拉、开漏(open drain)等。
pinctrl和引脚
在特定SoC的pinctrl驱动中,我们需要定义引脚。假设有一个PGA封装的芯片的引脚排布如下:
A B C D E F G H
8 o o o o o o o o
7 o o o o o o o o
6 o o o o o o o o
5 o o o o o o o o
4 o o o o o o o o
3 o o o o o o o o
2 o o o o o o o o
1 o o o o o o o o
在pinctrl驱动初始化的时候,需要向pinctrl子系统注册一个pinctrl_desc描述符,在该描述符中包含所有引脚的列表。可以通过如下代码来注册这个pin控制器并命名其所有引脚:
59#include
60
61const struct pinctrl_pin_descfoo_pins[] = {
62 PINCTRL_PIN(0, "A8"),
63 PINCTRL_PIN(1, "B8"),
64 PINCTRL_PIN(2, "C8"),
65 ...
66 PINCTRL_PIN(61, "F1"),
67 PINCTRL_PIN(62, "G1"),
68 PINCTRL_PIN(63, "H1"),
69};
70
71static struct pinctrl_descfoo_desc = {
72 .name = "foo",
73 .pins = foo_pins,
74 .npins = ARRAY_SIZE(foo_pins),
75 .maxpin = 63,
76 .owner = THIS_MODULE,
77};
78
79int __init foo_probe(void)
80{
81 struct pinctrl_dev *pctl;
82
83 pctl = pinctrl_register(&foo_desc,
84 if (IS_ERR(pctl))
85 pr_err("could not registerfoo pin driver\n");
86}
引脚组(pin group)
在pinctrl子系统中,支持将一组引脚绑定为同一功能。假设{ 0, 8, 16, 24 }这一组引脚承担SPI的功能,而{ 24, 25 }这一组引脚承担I2C接口功能。在驱动的代码中,需要体现这个分组关系,并且为这些分组实现pinctrl_ops的成员函数get_groups_count、get_groups_count和get_groups_count,将pinctrl_ops填充到前文pinctrl_desc的实例foo_desc中。
130#include
131
132struct foo_group {
133 const char *name;
134 const unsigned int *pins;
135 const unsigned num_pins;
136};
137
138static const unsigned int spi0_pins[] = { 0, 8, 16, 24 };
139static const unsigned int i2c0_pins[] = { 24, 25 };
140
141static const struct foo_group foo_groups[] = {
142 {
143 .name = "spi0_grp",
144 .pins = spi0_pins,
145 .num_pins =ARRAY_SIZE(spi0_pins),
146 },
147 {
148 .name = "i2c0_grp",
149 .pins = i2c0_pins,
150 .num_pins =ARRAY_SIZE(i2c0_pins),
151 },
152};
153
154
155static int foo_get_groups_count(struct pinctrl_dev *pctldev)
156{
157 return ARRAY_SIZE(foo_groups);
158}
159
160static const char *foo_get_group_name(struct pinctrl_dev *pctldev,
161 unsigned selector)
162{
163 return foo_groups[selector].name;
164}
165
166static int foo_get_group_pins(struct pinctrl_dev *pctldev, unsigned selector,
167 unsigned **const pins,
168 unsigned *const num_pins)
169{
170 *pins = (unsigned *) foo_groups[selector].pins;
171 *num_pins =foo_groups[selector].num_pins;
172 return 0;
173}
174
175static struct pinctrl_opsfoo_pctrl_ops = {
176 .get_groups_count =foo_get_groups_count,
177 .get_group_name = foo_get_group_name,
178 .get_group_pins = foo_get_group_pins,
179};
180
181
182static struct pinctrl_descfoo_desc = {
183 ...
184 .pctlops = &foo_pctrl_ops,
185};
get_groups_count()成员函数用于告知pinctrl子系统该SoC中合法的被选引脚组有多少个,而get_group_name()则提供引脚组的名字,get_group_pins()提供引脚组的引脚表。在设备驱动调用pinctrl通用API使能某一组引脚的对应功能时,pinctrl子系统的核心层会调用上述callback函数。
引脚配置
设备驱动有时候需要配置引脚,譬如可能把引脚设置为高阻或者三态(达到类似断连引脚的效果),或通过某阻值将引脚上拉/下拉以确保默认状态下引脚的电平状态。驱动中可以自定义相应板级引脚配置API的细节,譬如某设备驱动可能通过如下代码将某引脚上拉:
#include
ret= pin_config_set("foo-dev", "FOO_GPIO_PIN",PLATFORM_X_PULL_UP);
其中的PLATFORM_X_PULL_UP由特定的pinctrl驱动定义。在特定的pinctrl驱动中,需要实现完成这些配置所需要的callback函数(pinctrl_desc的confops成员函数):
222#include
223#include
224#include "platform_x_pindefs.h"
225
226static int foo_pin_config_get(struct pinctrl_dev *pctldev,
227 unsigned offset,
228 unsigned long *config)
229{
230 struct my_conftype conf;
231
232 ... Find setting for pin @ offset ...
233
234 *config = (unsigned long) conf;
235}
236
237static int foo_pin_config_set(struct pinctrl_dev *pctldev,
238 unsigned offset,
239 unsigned long config)
240{
241 struct my_conftype *conf = (structmy_conftype *) config;
242
243 switch (conf) {
244 case PLATFORM_X_PULL_UP:
245 ...
246 }
247 }
248}
249
250static int foo_pin_config_group_get (struct pinctrl_dev *pctldev,
251 unsigned selector,
252 unsigned long *config)
253{
254 ...
255}
256
257static int foo_pin_config_group_set (struct pinctrl_dev *pctldev,
258 unsigned selector,
259 unsigned long config)
260{
261 ...
262}
263
264static struct pinconf_opsfoo_pconf_ops = {
265 .pin_config_get = foo_pin_config_get,
266 .pin_config_set = foo_pin_config_set,
267 .pin_config_group_get =foo_pin_config_group_get,
268 .pin_config_group_set =foo_pin_config_group_set,
269};
270
271/* Pin config operations are handled by some pin controller */
272static struct pinctrl_descfoo_desc = {
273 ...
274 .confops = &foo_pconf_ops,
275};
其中的pin_config_group_get()、pin_config_group_set()针对的是可同时配置一个引脚组的状态情况,而pin_config_get()、pin_config_set()针对的则是单个引脚的配置。
与GPIO子系统的交互
pinctrl驱动中所覆盖的引脚可能同时可作为GPIO用,内核的GPIO子系统和pinctrl子系统本来是并行工作的,但是有时候需要交叉映射,这种情况下,需要在pinctrl驱动中告知pinctrl子系统核心层GPIO与底层pinctrl驱动所管理的引脚之间的映射关系。假设pinctrl驱动中定义的引脚32~47与gpio_chip实例chip_a的GPIO对应,引脚64~71与gpio_chip实例chip_b的GPIO对应,即映射关系为:
chip a:
- GPIO range :[32 .. 47]
- pinrange : [32 .. 47]
chip b:
- GPIO range :[48 .. 55]
- pinrange : [64 .. 71]
则在特定pinctrl驱动中可以透过如下代码注册2个GPIO范围:
305struct gpio_chip chip_a;
306struct gpio_chip chip_b;
307
308static struct pinctrl_gpio_range gpio_range_a = {
309 .name = "chip a",
310 .id = 0,
311 .base = 32,
312 .pin_base = 32,
313 .npins = 16,
314 .gc = &chip_a;
315};
316
317static struct pinctrl_gpio_range gpio_range_b = {
318 .name = "chip b",
319 .id = 0,
320 .base = 48,
321 .pin_base = 64,
322 .npins = 8,
323 .gc = &chip_b;
324};
325
326{
327 struct pinctrl_dev *pctl;
328 ...
329 pinctrl_add_gpio_range(pctl,&gpio_range_a);
330 pinctrl_add_gpio_range(pctl,&gpio_range_b);
331}
在基于内核gpiolib的GPIO驱动中,若设备驱动需进行GPIO申请gpio_request()和释放gpio_free(),GPIO驱动则会调用pinctrl子系统中的pinctrl_request_gpio()和pinctrl_free_gpio()通用API,pinctrl子系统会查找申请的GPIO和pin的映射关系,并确认引脚是否被其他复用功能所占用。与pinctrl子系统通用层pinctrl_request_gpio()和pinctrl_free_gpio()API对应,在底层的具体pinctrl驱动中,需要实现pinmux_ops结构体的gpio_request_enable()和gpio_disable_free()成员函数。
除了gpio_request_enable()和gpio_disable_free()成员函数外,pinmux_ops结构体主要还用来封装pinmux功能enable/disable的callback函数,下面可以看到它更多的细节。
引脚复用(pinmux)
pinctrl驱动中可处理引脚复用,它定义了FUNCTIONS(功能),驱动可以设置某FUNCTIONS的enable或者disable。各个FUNCTIONS联合起来组成一个一维数组,譬如{ spi0, i2c0, mmc0 }就描述了3个不同的FUNCTIONS。
一个特定的功能总是要求一些引脚组(pingroup)来完成,引脚组的数量为可以为1个或者多个。假设对前文所描述的PGA封装的SoC而言,如下图:
387
388 A B C D E F G H
389 +---+
390 8 | o | o o o o o o o
391 | |
392 7 | o | o o o o o o o
393 | |
394 6 | o | o o o o o o o
395 +---+---+
396 5 | o | o | o o o o o o
397 +---+---+ +---+
398 4 o o o o o o | o | o
399 | |
400 3 o o o o o o | o | o
401 | |
402 2 o o o o o o | o | o
403 +-------+-------+-------+---+---+
404 1 | o o| o o | o o | o | o |
405 +-------+-------+-------+---+---+
I2C功能由{ A5, B5 }引脚组成,而在定义引脚描述的pinctrl_pin_desc结构体实例foo_pins的时候,将它们的序号定义为了{ 24, 25 } ;而SPI功能则由可以由{ A8, A7, A6, A5 }和 { G4, G3, G2, G1 }, 也即{ 0, 8, 16, 24 }和{ 38, 46, 54, 62 }两个引脚组完成(注意在整个系统中,引脚组的名字不会重叠)。
由此,功能和引脚组的组合就可以决定一组引脚在系统里的作用,因此在设置某组引脚的作用时,pinctrl的核心层会将功能的序号以及引脚组的序号传递给底层pinctrl驱动中相关的callback函数。
在整个系统中,驱动或板级代码调用pinmux相关的API获取引脚后,会形成一个(pinctrl、使用引脚的设备、功能、引脚组)的映射关系,假设在某电路板上,将让spi0 设备使用pinctrl0的fspi0功能以及gspi0引脚组,让i2c0设备使用pinctrl0的fi2c0功能和gi2c0引脚组,我们将得到如下的映射关系:
502 {
503 {"map-spi0", spi0, pinctrl0, fspi0,gspi0},
504 {"map-i2c0", i2c0, pinctrl0,fi2c0, gi2c0}
505 }
pinctrl子系统的核心会保证每个引脚的排他性,因此一个引脚如果已经被某设备用掉了,而其他的设备又申请该引脚行驶其他的功能或GPIO,则pinctrl核心层会让该次申请失败。
特定pinctrl驱动中pinmux相关的代码主要处理如何enable/disable某一{功能,引脚组}的组合,譬如,当spi0设备申请pinctrl0的fspi0功能和gspi0引脚组以便将gspi0引脚组配置为SPI接口时,相关的callback被组织进一个pinmux_ops结构体,而该结构体的实例最终成为前文pinctrl_desc的pmxops成员:
562#include
563#include
564
565struct foo_group {
566 const char *name;
567 const unsigned int *pins;
568 const unsigned num_pins;
569};
570
571static const unsigned spi0_0_pins[] = { 0, 8, 16, 24 };
572static const unsigned spi0_1_pins[] = { 38, 46, 54, 62 };
573static const unsigned i2c0_pins[] = { 24, 25 };
574static const unsigned mmc0_1_pins[] = { 56, 57 };
575static const unsigned mmc0_2_pins[] = { 58, 59 };
576static const unsigned mmc0_3_pins[] = { 60, 61, 62, 63 };
577
578static const struct foo_group foo_groups[] = {
579 {
580 .name ="spi0_0_grp",
581 .pins = spi0_0_pins,
582 .num_pins =ARRAY_SIZE(spi0_0_pins),
583 },
584 {
585 .name ="spi0_1_grp",
586 .pins = spi0_1_pins,
587 .num_pins = ARRAY_SIZE(spi0_1_pins),
588 },
589 {
590 .name = "i2c0_grp",
591 .pins = i2c0_pins,
592 .num_pins =ARRAY_SIZE(i2c0_pins),
593 },
594 {
595 .name ="mmc0_1_grp",
596 .pins = mmc0_1_pins,
597 .num_pins =ARRAY_SIZE(mmc0_1_pins),
598 },
599 {
600 .name ="mmc0_2_grp",
601 .pins = mmc0_2_pins,
602 .num_pins =ARRAY_SIZE(mmc0_2_pins),
603 },
604 {
605 .name ="mmc0_3_grp",
606 .pins = mmc0_3_pins,
607 .num_pins =ARRAY_SIZE(mmc0_3_pins),
608 },
609};
610
611
612static int foo_get_groups_count(struct pinctrl_dev *pctldev)
613{
614 return ARRAY_SIZE(foo_groups);
615}
616
617static const char *foo_get_group_name(struct pinctrl_dev *pctldev,
618 unsigned selector)
619{
620 return foo_groups[selector].name;
621}
622
623static int foo_get_group_pins(struct pinctrl_dev *pctldev, unsigned selector,
624 unsigned **const pins,
625 unsigned *const num_pins)
626{
627 *pins = (unsigned *) foo_groups[selector].pins;
628 *num_pins =foo_groups[selector].num_pins;
629 return 0;
630}
631
632static struct pinctrl_ops foo_pctrl_ops = {
633 .get_groups_count =foo_get_groups_count,
634 .get_group_name = foo_get_group_name,
635 .get_group_pins = foo_get_group_pins,
636};
637
638struct foo_pmx_func {
639 const char *name;
640 const char * const *groups;
641 const unsigned num_groups;
642};
643
644static const char * const spi0_groups[] = { "spi0_0_grp","spi0_1_grp" };
645static const char * const i2c0_groups[] = { "i2c0_grp" };
646static const char * const mmc0_groups[] = { "mmc0_1_grp","mmc0_2_grp",
647 "mmc0_3_grp" };
648
649static const struct foo_pmx_func foo_functions[] = {
650 {
651 .name = "spi0",
652 .groups = spi0_groups,
653 .num_groups =ARRAY_SIZE(spi0_groups),
654 },
655 {
656 .name = "i2c0",
657 .groups = i2c0_groups,
658 .num_groups =ARRAY_SIZE(i2c0_groups),
659 },
660 {
661 .name = "mmc0",
662 .groups = mmc0_groups,
663 .num_groups =ARRAY_SIZE(mmc0_groups),
664 },
665};
666
667int foo_get_functions_count(struct pinctrl_dev *pctldev)
668{
669 return ARRAY_SIZE(foo_functions);
670}
671
672const char *foo_get_fname(struct pinctrl_dev *pctldev, unsigned selector)
673{
674 return foo_functions[selector].name;
675}
676
677static int foo_get_groups(struct pinctrl_dev *pctldev, unsigned selector,
678 const char * const**groups,
679 unsigned * constnum_groups)
680{
681 *groups = foo_functions[selector].groups;
682 *num_groups =foo_functions[selector].num_groups;
683 return 0;
684}
685
686int foo_enable(struct pinctrl_dev *pctldev, unsigned selector,
687 unsigned group)
688{
689 u8 regbit = (1 << selector + group);
690
691 writeb((readb(MUX)|regbit), MUX)
692 return 0;
693}
694
695void foo_disable(struct pinctrl_dev *pctldev, unsigned selector,
696 unsigned group)
697{
698 u8 regbit = (1 << selector +group);
699
700 writeb((readb(MUX) & ~(regbit)),MUX)
701 return 0;
702}
703
704 structpinmux_ops foo_pmxops = {
705 .get_functions_count =foo_get_functions_count,
706 .get_function_name = foo_get_fname,
707 .get_function_groups = foo_get_groups,
708 .enable = foo_enable,
709 .disable = foo_disable,
710};
711
712/* Pinmux operations are handled by some pin controller */
713static struct pinctrl_desc foo_desc = {
714 ...
715 .pctlops = &foo_pctrl_ops,
716 .pmxops = &foo_pmxops,
717};
718
具体的pinctrl、使用引脚的设备、功能、引脚组的映射关系,可以在板文件中透过定义pinctrl_map结构体的实例来展开,如:
828static struct pinctrl_map __initdata mapping[] = {
829 PIN_MAP_MUX_GROUP("foo-i2c.o", PINCTRL_STATE_DEFAULT,"pinctrl-foo", NULL, "i2c0"),
830};
PIN_MAP_MUX_GROUP是一个快捷的宏,用于赋值pinctrl_map的各个成员:
88#define PIN_MAP_MUX_GROUP(dev, state, pinctrl, grp, func) \
89 { \
90 .dev_name = dev, \
91 .name = state, \
92 .type =PIN_MAP_TYPE_MUX_GROUP, \
93 .ctrl_dev_name = pinctrl, \
94 .data.mux = { \
95 .group = grp, \
96 .function = func, \
97 }, \
98 }
99
当然,这种映射关系最好是在DeviceTree中透过结点的属性进行,具体的结点属性的定义方法依赖于具体的pinctrl驱动,最终在pinctrl驱动中透过pinctrl_ops结构体的.dt_node_to_map()成员函数读出属性并建立映射表。
又由于1个功能可能可由2个不同的引脚组实现,可能形成如下对于同1个功能有2个可选引脚组的pinctrl_map:
staticstruct pinctrl_map __initdata mapping[] = {
PIN_MAP_MUX_GROUP("foo-spi.0","spi0-pos-A", "pinctrl-foo", "spi0_0_grp", "spi0"),
PIN_MAP_MUX_GROUP("foo-spi.0","spi0-pos-B", "pinctrl-foo", "spi0_1_grp", "spi0"),
};
在运行时,我们可以透过类似的API去查找并设置位置A的引脚组行驶SPI接口的功能:
954 p = devm_pinctrl_get(dev);
955 s = pinctrl_lookup_state(p, "spi0-pos-A");
956 ret = pinctrl_select_state(p, s);
或者可以更加简单地使用:
p =devm_pinctrl_get_select(dev, "spi0-pos-A");
若想运行时切换位置A和B的引脚组行使SPI的接口功能,代码结构类似:
1163foo_probe()
1164{
1165 /* Setup */
1166 p = devm_pinctrl_get(&device);
1167 if (IS_ERR(p))
1168 ...
1169
1170 s1 = pinctrl_lookup_state(foo->p," spi0-pos-A");
1171 if (IS_ERR(s1))
1172 ...
1173
1174 s2 = pinctrl_lookup_state(foo->p," spi0-pos-B");
1175 if (IS_ERR(s2))
1176 ...
1177}
1178
1179foo_switch()
1180{
1181 /* Enable on position A */
1182 ret = pinctrl_select_state(s1);
1183 if (ret < 0)
1184 ...
1185
1186 ...
1187
1188 /* Enable on position B */
1189 ret = pinctrl_select_state(s2);
1190 if (ret < 0)
1191 ...
1192
1193 ...
1194}
pinctrl子系统中定义了pinctrl_get_select_default()以及有devm_前缀的devm_ pinctrl_get_select() API,许多驱动如drivers/i2c/busses/i2c-imx.c、drivers/leds/leds-gpio.c、drivers/spi/spi-imx.c、drivers/tty/serial/omap-serial.c、sound/soc/mxs/mxs-saif.c都是透过这一API来获取自己的引脚组的。xxx_get_select_default()最终会调用
pinctrl_get_select(dev,PINCTRL_STATE_DEFAULT);
其中PINCTRL_STATE_DEFAULT定义为"default",它描述了缺省状态下某设备的pinmux功能和引脚组映射情况。
8. clock驱动
在一个SoC中,晶振、PLL、divider和gate等会形成一个clock树形结构,在Linux 2.6中,也存有clk_get_rate()、clk_set_rate()、clk_get_parent()、clk_set_parent()等通用API,但是这些API由每个SoC单独实现,而且各个SoC供应商在实现方面的差异很大,于是内核增加了一个新的common clk框架以解决这个碎片化问题。之所以称为common clk,这个common主要体现在:
§ 统一的clk结构体,统一的定义于clk.h中的clk API,这些API会调用到统一的clk_ops中的callback函数;
这个统一的 clk结构体的定义如下:
struct clk {
const char *name;
const struct clk_ops *ops;
struct clk_hw *hw;
char **parent_names;
struct clk **parents;
struct clk *parent;
struct hlist_head children;
struct hlist_node child_node;
...
};
其中的clk_ops定义为:
struct clk_ops {
int (*prepare)(struct clk_hw *hw);
void (*unprepare)(struct clk_hw *hw);
int (*enable)(struct clk_hw *hw);
void (*disable)(struct clk_hw *hw);
int (*is_enabled)(struct clk_hw *hw);
unsigned long (*recalc_rate)(struct clk_hw *hw,
unsigned long parent_rate);
long (*round_rate)(struct clk_hw *hw,unsigned long,
unsigned long *);
int (*set_parent)(struct clk_hw *hw,u8 index);
u8 (*get_parent)(struct clk_hw *hw);
int (*set_rate)(struct clk_hw *hw,unsigned long);
void (*init)(struct clk_hw *hw);
};
§ 对于具体的SoC如何去实现针对自己SoC的clk驱动, 如何提供硬件特定的callback函数的方法也进行了统一。
在common的clk结构体中,clk_hw是联系clk_ops中callback函数和具体硬件细节的纽带,clk_hw中只包含common clk结构体的指针以及具体硬件的init数据:
structclk_hw {
struct clk *clk;
const struct clk_init_data *init;
};
其中的clk_init_data包含了具体时钟的name、可能的parent的name的列表parent_names、可能的parent数量num_parents等,实际上这些name的匹配对建立时钟间的父子关系功不可没:
136struct clk_init_data {
137 const char *name;
138 const struct clk_ops *ops;
139 const char **parent_names;
140 u8 num_parents;
141 unsigned long flags;
142};
从clk核心层到具体芯片clk驱动的调用顺序为:
clk_enable(clk);
è clk->ops->enable(clk->hw);
通用的clk API(如clk_enable)在调用底层的clk结构体的clk_ops的成员函数(如clk->ops->enable)时,会将clk->hw传递过去。
一般在具体的驱动中会定义针对特定clk(如foo)的结构体,该结构体中包含clk_hw成员以及硬件私有数据:
structclk_foo {
struct clk_hw hw;
... hardware specific data goes here ...
};
并定义to_clk_foo()宏以便通过clk_hw获取clk_foo:
#defineto_clk_foo(_hw) container_of(_hw, struct clk_foo, hw)
在针对clk_foo的clk_ops的callback函数中我们便可以透过clk_hw和to_clk_foo最终获得硬件私有数据并访问硬件读写寄存器以改变时钟的状态:
structclk_ops clk_foo_ops {
.enable = &clk_foo_enable;
.disable = &clk_foo_disable;
};
intclk_foo_enable(struct clk_hw *hw)
{
struct clk_foo *foo;
foo = to_clk_foo(hw);
... perform magic on foo ...
return 0;
};
在具体的clk驱动中,需要透过clk_register()以及它的变体注册硬件上所有的clk,通过clk_register_clkdev()注册clk与使用clk的设备之间的映射关系,也即进行clk和使用clk的设备之间的绑定,这2个函数的原型为:
struct clk *clk_register(struct device *dev, structclk_hw *hw);
int clk_register_clkdev(struct clk *clk, const char*con_id,
const char*dev_fmt, ...);
另外,针对不同的clk类型(如固定频率的clk、clk gate、clkdivider等),clk子系统又提供了几个快捷函数以完成clk_register()的过程:
struct clk *clk_register_fixed_rate(struct device*dev, const char *name,
const char *parent_name, unsigned long flags,
unsigned long fixed_rate);
struct clk *clk_register_gate(struct device *dev,const char *name,
const char *parent_name, unsigned long flags,
void __iomem *reg, u8 bit_idx,
u8 clk_gate_flags, spinlock_t *lock);
struct clk *clk_register_divider(struct device *dev,const char *name,
const char *parent_name, unsigned long flags,
void __iomem *reg, u8 shift, u8 width,
u8 clk_divider_flags, spinlock_t *lock);
以drivers/clk/clk-prima2.c为例,该驱动对应的芯片SiRFprimaII外围接了一个26MHz的晶振和一个32.768KHz供给的RTC的晶振,在26MHz晶振的后面又有3个PLL,当然PLL后面又接了更多的clk结点,则我们看到它的相关驱动代码形如:
staticunsigned long pll_clk_recalc_rate(struct clk_hw *hw,
unsigned long parent_rate)
{
unsigned long fin = parent_rate;
struct clk_pll *clk = to_pllclk(hw);
…
}
staticlong pll_clk_round_rate(struct clk_hw *hw, unsigned long rate,
unsigned long *parent_rate)
{
…
}
staticint pll_clk_set_rate(struct clk_hw *hw, unsigned long rate,
unsigned long parent_rate)
{
…
}
staticstruct clk_ops std_pll_ops = {
.recalc_rate = pll_clk_recalc_rate,
.round_rate = pll_clk_round_rate,
.set_rate = pll_clk_set_rate,
};
staticconst char *pll_clk_parents[] = {
"osc",
};
staticstruct clk_init_data clk_pll1_init = {
.name = "pll1",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_init_data clk_pll2_init = {
.name = "pll2",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_init_data clk_pll3_init = {
.name = "pll3",
.ops = &std_pll_ops,
.parent_names = pll_clk_parents,
.num_parents = ARRAY_SIZE(pll_clk_parents),
};
staticstruct clk_pll clk_pll1 = {
.regofs = SIRFSOC_CLKC_PLL1_CFG0,
.hw = {
.init = &clk_pll1_init,
},
};
staticstruct clk_pll clk_pll2 = {
.regofs = SIRFSOC_CLKC_PLL2_CFG0,
.hw = {
.init = &clk_pll2_init,
},
};
staticstruct clk_pll clk_pll3 = {
.regofs = SIRFSOC_CLKC_PLL3_CFG0,
.hw = {
.init = &clk_pll3_init,
},
};
void__init sirfsoc_of_clk_init(void)
{
…
/* These are always available (RTC and26MHz OSC)*/
clk = clk_register_fixed_rate(NULL,"rtc", NULL,
CLK_IS_ROOT, 32768);
BUG_ON(!clk);
clk = clk_register_fixed_rate(NULL,"osc", NULL,
CLK_IS_ROOT, 26000000);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll1.hw);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll2.hw);
BUG_ON(!clk);
clk = clk_register(NULL, &clk_pll3.hw);
BUG_ON(!clk);
…
clk = clk_register(NULL, &clk_gps.hw);
BUG_ON(!clk);
clk_register_clkdev(clk, NULL,"a8010000.gps");
…
}
另外,目前内核更加倡导的方法是透过Device Tree来描述电路板上的clk树,以及clk和设备之间的绑定关系。通常我们需要在clk控制器的结点中定义#clock-cells属性,并且在clk驱动中透过of_clk_add_provider()注册clk控制器为一个clk树的提供者(provider),并建立系统中各个clk和index的映射表,如:
Clock ID
---------------------------
rtc 0
osc 1
pll1 2
pll2 3
pll3 4
mem 5
sys 6
security 7
dsp 8
gps 9
mf 10
…
在每个具体的设备中,对应的.dts结点上的clocks = <&clks index>属性指向其引用的clk控制器结点以及使用的clk的index,如:
gps@a8010000{
compatible ="sirf,prima2-gps";
reg = <0xa8010000 0x10000>;
interrupts = <7>;
clocks = <&clks 9>;
};
要特别强调的是,在具体的设备驱动中,一定要透过通用clk API来操作所有的clk,而不要直接透过读写clk控制器的寄存器来进行,这些API包括:
structclk *clk_get(struct device *dev, const char *id);
structclk *devm_clk_get(struct device *dev, const char *id);
intclk_enable(struct clk *clk);
intclk_prepare(struct clk *clk);
voidclk_unprepare(struct clk *clk);
voidclk_disable(struct clk *clk);
staticinline int clk_prepare_enable(struct clk *clk);
staticinline void clk_disable_unprepare(struct clk *clk);
unsignedlong clk_get_rate(struct clk *clk);
intclk_set_rate(struct clk *clk, unsigned long rate);
structclk *clk_get_parent(struct clk *clk);
intclk_set_parent(struct clk *clk, struct clk *parent);
值得一提的是,名称中含有prepare、unprepare字符串的API是内核后来才加入的,过去只有clk_enable和clk_disable。只有clk_enable和clk_disable带来的问题是,有时候,某些硬件的enable/disable clk可能引起睡眠使得enable/disable不能在原子上下文进行。加上prepare后,把过去的clk_enable分解成不可在原子上下文调用的clk_prepare(该函数可能睡眠)和可以在原子上下文调用的clk_enable。而clk_prepare_enable则同时完成prepare和enable的工作,当然也只能在可能睡眠的上下文调用该API。
9. dmaengine驱动
dmaengine是一套通用的DMA驱动框架,该框架为具体使用DMA通道的设备驱动提供了一套统一的API,而且也定义了具体的DMA控制器实现这一套API的方法。
对于使用DMA引擎的设备驱动而言,发起DMA传输的过程变得整洁,如在sound子系统的sound/soc/soc-dmaengine-pcm.c中,会使用dmaengine进行周期性的DMA传输,相关的代码如下:
staticint dmaengine_pcm_prepare_and_submit(struct snd_pcm_substream *substream)
{
struct dmaengine_pcm_runtime_data*prtd = substream_to_prtd(substream);
struct dma_chan *chan =prtd->dma_chan;
struct dma_async_tx_descriptor *desc;
enum dma_transfer_direction direction;
unsigned long flags = DMA_CTRL_ACK;
…
desc = dmaengine_prep_dma_cyclic(chan,
substream->runtime->dma_addr,
snd_pcm_lib_buffer_bytes(substream),
snd_pcm_lib_period_bytes(substream), direction, flags);
…
desc->callback =dmaengine_pcm_dma_complete;
desc->callback_param = substream;
prtd->cookie =dmaengine_submit(desc);
}
intsnd_dmaengine_pcm_trigger(struct snd_pcm_substream *substream, int cmd)
{
struct dmaengine_pcm_runtime_data *prtd= substream_to_prtd(substream);
int ret;
switch (cmd) {
case SNDRV_PCM_TRIGGER_START:
ret =dmaengine_pcm_prepare_and_submit(substream);
…
dma_async_issue_pending(prtd->dma_chan);
break;
case SNDRV_PCM_TRIGGER_RESUME:
case SNDRV_PCM_TRIGGER_PAUSE_RELEASE:
dmaengine_resume(prtd->dma_chan);
break;
…
}
这个过程可分为三步:
1. 透过dmaengine_prep_dma_xxx初始化一个具体的DMA传输描述符(本例中为结构体dma_async_tx_descriptor的实例desc)
2. 透过dmaengine_submit()将该描述符插入dmaengine驱动的传输队列
3. 在需要传输的时候透过类似dma_async_issue_pending()的调用启动对应DMA通道上的传输。
也就是不管具体硬件的DMA控制器是如何实现的,在软件意义上都抽象为了设置DMA描述符、插入DMA描述符入传输队列以及启动DMA传输的过程。
除了前文用到的dmaengine_prep_dma_cyclic()用于定义周期性DMA传输外,还有一组类似API可以定义各种类型的DMA描述符,特定硬件的DMA驱动的主要工作就是实现封装在内核dma_device结构体中的这些个成员函数(定义在include/linux/dmaengine.h头文件中):
500/**
501 * struct dma_device - info on the entitysupplying DMA services
…
518 * @device_prep_dma_memcpy: prepares a memcpyoperation
519 * @device_prep_dma_xor: prepares a xoroperation
520 * @device_prep_dma_xor_val: prepares a xorvalidation operation
521 * @device_prep_dma_pq: prepares a pqoperation
522 * @device_prep_dma_pq_val: prepares apqzero_sum operation
523 * @device_prep_dma_memset: prepares a memsetoperation
524 * @device_prep_dma_interrupt: prepares an endof chain interrupt operation
525 * @device_prep_slave_sg: prepares a slave dmaoperation
526 * @device_prep_dma_cyclic: prepare a cyclicdma operation suitable for audio.
527 * The function takes a buffer of size buf_len. The callback function will
528 * be called after period_len bytes have been transferred.
529 * @device_prep_interleaved_dma: Transferexpression in a generic way.
…
*/
在底层的dmaengine驱动实例中,一般会组织好这个dma_device结构体,并透过dma_async_device_register()注册之。在其各个成员函数中,一般会透过链表来管理DMA描述符的运行、free等队列。
dma_device的成员函数device_issue_pending()用于实现DMA传输开启的功能,当每次DMA传输完成后,驱动中注册的中断服务程序的顶半部或者底半部会调用DMA描述符dma_async_tx_descriptor中设置的callback函数,该callback函数来源于使用DMA通道的设备驱动。
典型的dmaengine驱动可见于drivers/dma/目录下的sirf-dma.c、omap-dma.c、pl330.c、ste_dma40.c等。
10. 总结
移植Linux到全新的SMP SoC上,需在底层提供定时器节拍、中断控制器、SMP启动、GPIO、clock、pinctrl等功能,这些底层的功能被封装好后,其他设备驱动只能调用内核提供的通用API。这良好地体现了内核的分层设计。即驱动都调用与硬件无关的通用API,而这些API的底层实现则更多的是填充内核规整好的callback函数。
Linux内核社区针对pinctrl、clock、GPIO、DMA提供独立的子系统,既给具体的设备驱动提供了统一了API,进一步提高了设备驱动的跨平台性,又为每个SoC和machine实现这些底层的API定义好了条条框框,从而可以最大程度上避免每个硬件实现过多的冗余代码。
顶
13
踩
0
- 上一篇ARM Linux 3.x的设备树(Device Tree)
- 下一篇分享《Essential Linux Device Drivers》中文版高清电子版
我的同类文章
Linux Kernel开发(14)
- •Network write system call latency2016-01-17阅读274
- •ARM Linux 3.x的设备树(Device Tree)2013-01-01阅读113532
- •Linux RT(1)-硬实时Linux(RT-Preempt Patch)在PC上的编译、使用和测试2012-10-03阅读8246
- •让busybox里的free命令可以显示page cache2012-03-26阅读3978
- •Linux内核最新的连续内存分配器(CMA)——避免预留大块内存2012-03-01阅读14891
- •Linux电源管理系统架构和驱动(1)-Linux电源管理全局架构2015-02-21阅读3449
- •Linux RT(2)-硬实时Linux(RT-Preempt Patch)的中断线程化2012-10-19阅读5899
- •Essential Linux Device Driver附录A . Linux汇编2012-09-17阅读2826
- •Linux gdb调试器用法全面解析2012-03-22阅读27845
更多文章
I2C通信详解-1.12.ARM裸机第十二部分
SDRAM和重定位relocate-1.5.ARM裸机第五部分
定时器、看门狗和RTC-1.9.ARM裸机第九部分
内核的配置和编译原理-uboot和系统移植第15部分
C++ DirectX 游戏开发初级教程
猜你在找
查看评论
3楼 webster_yang 2015-09-10 22:18发表 [回复]
宋老师,您好。请问下,能否推荐或写一篇博客,u-boot和kernel的版本推进历程,关键版本之间的区别?我以前零散地学习了一些,发现都是以前的,现在看新版本的代码。很希望能从大体上学习下版本推荐以及主要区别...非常感谢!
2楼 doom66151 2013-09-05 02:27发表 [回复]
讲的不错。
不过题目写的太大了。一个SOC的移植,除了这些gpio和clk、dma,还有很多:各种总线控制器,显示,音频,协处理器方面等。内核还会继续进化,将共有的抽象出来。
1楼 jillpotti 2013-04-14 21:17发表 [回复]
宋老师,您好,有个问题想请教您,关于页表的
帖子地址
http://bbs.chinaunix.net/forum.php?mod=viewthread&tid=4076686&page=1&extra=#pid23840654
麻烦了
:)
发表评论
- 用 户 名:
- special00
- 评论内容:
* 以上用户言论只代表其个人观点,不代表CSDN网站的观点或立场
核心技术类目
全部主题 Hadoop AWS 移动游戏 Java Android iOS Swift 智能硬件 Docker OpenStack VPN Spark ERP IE10Eclipse CRM JavaScript 数据库 Ubuntu NFC WAP jQuery BI HTML5 Spring Apache .NET API HTML SDK IISFedora XML LBS Unity Splashtop UML components Windows Mobile Rails QEMU KDE Cassandra CloudStack FTCcoremail OPhone CouchBase 云计算 iOS6 Rackspace Web App SpringSide Maemo Compuware 大数据 aptech PerlTornado Ruby Hibernate ThinkPHP HBase Pure Solr Angular Cloud Foundry Redis Scala Django Bootstrap
- 个人资料
21cnbao
-
- 访问:631910次
- 积分:6233
- 等级:
- 排名:第2270名
- 原创:56篇
- 转载:2篇
- 译文:3篇
- 评论:450条
- 新浪微博
- 文章搜索
- 文章分类
- Android系统架构(31)
- Linux Driver开发(18)
- Linux Kernel开发(15)
- Linux Userspace开发(4)
- 技术人生(2)
- 文章存档
- 2016年01月(1)
- 2015年08月(1)
- 2015年04月(1)
- 2015年02月(1)
- 2014年10月(2)
展开
- 阅读排行
- ARM Linux 3.x的设备树(Device Tree)(113736)
- Linux芯片级移植与底层驱动(基于3.7.4内核)(31822)
- Linux gdb调试器用法全面解析(27892)
- Service与Android系统实现(1)-- 应用程序里的Service(26973)
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新(21346)
- Android应用程序开发以及背后的设计思想深度剖析(1)(19166)
- 分享《Linux设备驱动开发详解》第2版高清电子版(14931)
- Linux内核最新的连续内存分配器(CMA)——避免预留大块内存(14915)
- Android架构纵横谈之——软件自愈能力 (1)(14076)
- 分享《Essential Linux Device Drivers》中文版高清电子版(13068)
- 评论排行
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新(93)
- ARM Linux 3.x的设备树(Device Tree)(49)
- 《Linux设备驱动开发详解》第3版现隆重征求读者创作意见(44)
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言(43)
- Android架构纵横谈之——软件自愈能力 (1)(18)
- 分享《Linux设备驱动开发详解》第2版高清电子版(17)
- Android应用程序开发以及背后的设计思想深度剖析(3)(16)
- 炼狱与逐光——我的十杰博客获奖感言(16)
- 宋宝华ABC(14)
- Android架构纵横谈之——软件自愈能力 (2)(13)
- 推荐文章
-
- *正方形数量问题终极解答
- *几种软负载均衡策略分析
- *浅谈Storm流式处理框架
- *阿里2016实习offer五面经验与总结
- *Android移动应用开发中常见的经验技巧总结
- * 关于前端开发的思考
- 最新评论
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新
a661110: 入手后发现没有光盘,上云盘后发现p1和p2居然都是压缩包,每个好几G...然而我只需要代码...心累...
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)进展同步更新
a661110: 入手后发现没有光盘,上云盘后发现p1和p2居然都是压缩包,每个好几G...然而我只需要代码...心累...
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言
elicec: 很喜欢博主的文章,刚刚用豆约翰博客备份专家备份了您的全部博文。
- Linux电源管理系统架构和驱动(1)-Linux电源管理全局架构
elicec: 很喜欢博主的文章,刚刚用豆约翰博客备份专家备份了您的全部博文。
- ARM Linux 3.x的设备树(Device Tree)
21cnbao: @qq_14964095:书上说地非常清楚, compatible匹配或者别名匹配。
- ARM Linux 3.x的设备树(Device Tree)
qq_14964095: 请教一下,以前注册设备和注册驱动的名字相同,才能probe生成设备节点,那么在使用设备树注册设备以后...
- ARM Linux 3.x的设备树(Device Tree)
Eliot_shao: 设备驱动总线模型并没有变,搞了MTK平台才发现设备树这个东西,此文收益匪浅,谢谢~
- 《Linux设备驱动开发详解(第3版)》(即《Linux设备驱动开发详解:基于最新的Linux 4.0内核》)前言
21cnbao: @summer_xxtt:电子版的问题确实很恼火,我这其实也没有电子版,出版社也不给我。已经很多人给...
- ARM Linux 3.x的设备树(Device Tree)
Wit-Z-Joy: 后面的对比加深了理解
- ARM Linux 3.x的设备树(Device Tree)
Wit-Z-Joy: 新手学驱动看设备树云里雾里
公司简介|招贤纳士|广告服务|银行汇款帐号|联系方式|版权声明|法律顾问|问题报告|合作伙伴|论坛反馈
网站客服杂志客服微博客服[email protected]400-600-2320|北京创新乐知信息技术有限公司 版权所有|江苏乐知网络技术有限公司 提供商务支持
京 ICP 证 09002463 号|Copyright © 1999-2014, CSDN.NET, All Rights Reserved