LOAM代码笔记(一)
LOAM主要由四个节点组成,分别为:
multiScanRegistration、laserOdometry、laserMapping和transformMaintenance。
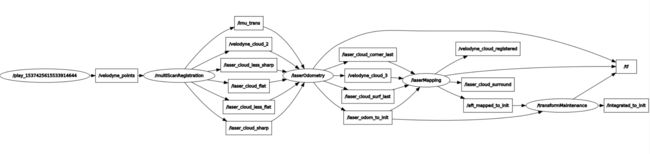
其中,核心算法封装在BasicScanRegistration、BasicLaserOdomotry、BasicLaserMapping和BasicTransformMaintenance中,这几个类的实现不涉及ROS的函数,为loam移植到其他平台提供了方便。
按照数据流的顺序,我们来一步一步分析loam的算法。首先是multiScanRegistraition。
multiScanRegistration
设置节点的主程序位于multi_scan_registration_node.cpp中,代码十分简洁,只有20行,事实上,四个节点的主程序部分都是20行,非常工整。
multi_scan_registration_node.cpp:
#include
#include "loam_velodyne/MultiScanRegistration.h"
/** Main node entry point. */
int main(int argc, char **argv)
{
ros::init(argc, argv, "scanRegistration");
ros::NodeHandle node;
ros::NodeHandle privateNode("~");
loam::MultiScanRegistration multiScan;
if (multiScan.setup(node, privateNode)) {
// initialization successful
ros::spin();
}
return 0;
}
点云注册的算法被封装在了MultiScanRegistration类中,他的继承关系为:
BasicLaserRegistration ———> ScanRegistraition ——>MultiScanRegistraion
ScanRegistration在父类的基础上增加了读取节点参数、发布/订阅消息的函数。MultiScanRegistraion在父类的基础上增加了对点云数据的预处理。
loam支持16线、32线和64线的激光雷达,默认参数为16线,可以对MultiScanMapper进行修改来切换不同的激光雷达模式。
MultiScanRegistration算法流程:
(1)预处理:读取点云后,先计算激光雷达的起始角度和终止角度,这里有一点需要注意一下,激光雷达一个扫描周期扫过的角度不一定刚好是360度。起始角为一帧点云数据中第一个点的水平角,终止角为最后一个点的水平角。去除点云中的极小值(坐标接近于0),对点云的坐标顺序进行调整,将坐标系改成:向左—x轴,向上—y轴,向前—z轴,根据垂直角计算每个点在第几条扫描线上(scanID),然后根据数据点的水平角计算该点在一个扫描周期中的相对时间,公式为:
R e l a t i v e T i m e = S c a n P e r i o d × H o r i z o n t a l A n g l e − S t a r t A n g l e E n d A n g l e − S t a r t A n g l e RelativeTime = ScanPeriod\times\frac{HorizontalAngle-StartAngle}{EndAngle-StartAngle} RelativeTime=ScanPeriod×EndAngle−StartAngleHorizontalAngle−StartAngle
如果有IMU的话,借助IMU数据把数据点投影到开始扫描的位置。然后把调整过的点云按照各自所在的扫描线存入一个vector中,vector的大小为激光雷达的线数。这样一来就得到了一堆分布有序的点云。
void MultiScanRegistration::process(const pcl::PointCloud& laserCloudIn, const Time& scanTime)//scanTime:发送时候的时间
{
size_t cloudSize = laserCloudIn.size();
// determine scan start and end orientations
float startOri = -std::atan2(laserCloudIn[0].y, laserCloudIn[0].x);
float endOri = -std::atan2(laserCloudIn[cloudSize - 1].y,
laserCloudIn[cloudSize - 1].x) + 2 * float(M_PI);
if (endOri - startOri > 3 * M_PI) {
endOri -= 2 * M_PI;
} else if (endOri - startOri < M_PI) {
endOri += 2 * M_PI;
}
bool halfPassed = false;
pcl::PointXYZI point;
_laserCloudScans.resize(_scanMapper.getNumberOfScanRings());//_scanMapper.getNumberOfScanRings() = 16
// clear all scanline points
std::for_each(_laserCloudScans.begin(), _laserCloudScans.end(), [](auto&&v) {v.clear(); });
// extract valid points from input cloud
for (int i = 0; i < cloudSize; i++)
{
point.x = laserCloudIn[i].y;
point.y = laserCloudIn[i].z;
point.z = laserCloudIn[i].x;
// skip NaN and INF valued points
if (!pcl_isfinite(point.x) ||
!pcl_isfinite(point.y) ||
!pcl_isfinite(point.z)) {
continue;
}
// skip zero valued points
if (point.x * point.x + point.y * point.y + point.z * point.z < 0.0001) {
continue;
}
// calculate vertical point angle and scan ID
float angle = std::atan(point.y / std::sqrt(point.x * point.x + point.z * point.z));
int scanID = _scanMapper.getRingForAngle(angle);
if (scanID >= _scanMapper.getNumberOfScanRings() || scanID < 0 )//_scanMapper.getNumberOfScanRings() = 16
{
continue;
}
// calculate horizontal point angle
float ori = -std::atan2(point.x, point.z);
if (!halfPassed)
{
if (ori < startOri - M_PI / 2)
{
ori += 2 * M_PI;
}
else if (ori > startOri + M_PI * 3 / 2)
{
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI)
{
halfPassed = true;
}
}
else
{
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2)
{
ori += 2 * M_PI;
}
else if (ori > endOri + M_PI / 2)
{
ori -= 2 * M_PI;
}
}
// calculate relative scan time based on point orientation
float relTime = config().scanPeriod * (ori - startOri) / (endOri - startOri);
point.intensity = scanID + relTime;
projectPointToStartOfSweep(point, relTime);//没IMU,point不变
_laserCloudScans[scanID].push_back(point);
}
processScanlines(scanTime, _laserCloudScans);
publishResult();
}
(2)提取特征:loam把点云的特征点根据曲率分为两类——角点和平面点。计算曲率的算法跟论文里的公式有一点出入。论文里计算曲率的公式为:
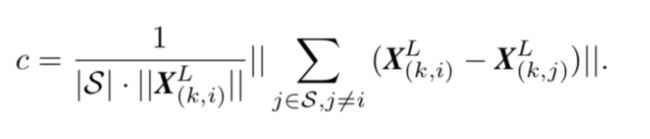
而代码里用的是公式求和后向量的平方和。计算曲率时,为了让特征点能够尽量均匀地分布,把每条扫描线分成若干个区域,默认分成6个区域,在每个区域内取2个角点,4个平面点。计算曲率时,在这个点的左边取n个点,右边取n个点作为领域,默认的n = 5。然后对当前特征区域内的点根据曲率排序,取曲率最大的2个点作为角点,曲率最小的4个点作为平面点,存到各自的点云变量中。这部分排序的代码看上去有点粗糙,还可以优化一下。以下是计算曲率并排序的代码:
void BasicScanRegistration::setRegionBuffersFor(const size_t& startIdx, const size_t& endIdx)
{
// resize buffers
size_t regionSize = endIdx - startIdx + 1;
_regionCurvature.resize(regionSize);
_regionSortIndices.resize(regionSize);
_regionLabel.assign(regionSize, SURFACE_LESS_FLAT);
// calculate point curvatures and reset sort indices
float pointWeight = -2 * _config.curvatureRegion;
for (size_t i = startIdx, regionIdx = 0; i <= endIdx; i++, regionIdx++)
{
float diffX = pointWeight * _laserCloud[i].x;
float diffY = pointWeight * _laserCloud[i].y;
float diffZ = pointWeight * _laserCloud[i].z;
for (int j = 1; j <= _config.curvatureRegion; j++)
{
diffX += _laserCloud[i + j].x + _laserCloud[i - j].x;
diffY += _laserCloud[i + j].y + _laserCloud[i - j].y;
diffZ += _laserCloud[i + j].z + _laserCloud[i - j].z;
}
_regionCurvature[regionIdx] = diffX * diffX + diffY * diffY + diffZ * diffZ;
_regionSortIndices[regionIdx] = i;
}
// sort point curvatures
for (size_t i = 1; i < regionSize; i++)
{
for (size_t j = i; j >= 1; j--)
{
if (_regionCurvature[_regionSortIndices[j] - startIdx] < _regionCurvature[_regionSortIndices[j - 1] - startIdx])
{
std::swap(_regionSortIndices[j], _regionSortIndices[j - 1]);
}
}
}
}
得到的特征点存在cornerPointsSharp和surfacePointsFlat变量里,根据曲率阈值surfaceCurvatureThreshold把完整点云中大于阈值的点存入cornerPointsLessSharp中,小于阈值的存入surfacePointsLessFlat中,发送给laserOdomotry节点。