51单片机入门例子
1、led流水灯
#include"reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
void delay(u16 i)
{
while(i--);
}
sbit led1=P2^2;
void main()
{
while(1)
{
led1=0;
delay(5000000000);
led1=1;
delay(5000000000);
}
}
2、蜂鸣器
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit beep=P1^5;
void delay(u16 i)
{
while(i--);
}
void main()
{
while(1)
{
beep=~beep;
delay(5000000000000);
}
}
3、数码管静态
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit led1=P2^2;
sbit led2=P2^3;
sbit led3=P2^4;
void delay(u16 i)
{
while(i--);
}
u8 code sharp[]={0x3f , 0x06 , 0x5b , 0x4f , 0x66 , 0x6d ,0x7d , 0x07 , 0x7f ,
0x6f , 0x77 , 0x7c ,0x39 , 0x5e , 0x79 , 0x71 , 0x00};
void main()
{
led1=0;led2=0;led3=0;
P0=sharp[15];
while(1);
}
4、数码管动态
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit led1=P2^2;
sbit led2=P2^3;
sbit led3=P2^4;
u8 code sharp[]={0x3f , 0x06 , 0x5b , 0x4f , 0x66 , 0x6d ,0x7d , 0x07 , 0x7f ,
0x6f , 0x77 , 0x7c ,0x39 , 0x5e , 0x79 , 0x71 , 0x00};
void delay(u16 i)
{
while(i--);
}
void Digdisplay()
{
int i;
for(i=0;i<8;i++)
{
switch(i)
{
case(0):
led1=0;led2=0;led3=0;break;
case(1):
led1=1;led2=0;led3=0;break;
case(2):
led1=0;led2=1;led3=0;break;
case(3):
led1=1;led2=1;led3=0;break;
case(4):
led1=0;led2=0;led3=1;break;
case(5):
led1=1;led2=0;led3=1;break;
case(6):
led1=0;led2=1;led3=1;break;
case(7):
led1=1;led2=1;led3=1;break;
}
P0=sharp[i];
delay(500000000000);
}
}
void main()
{
Digdisplay();
}
5、独立按键
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit led=P2^0;
sbit k1=P3^1;
void delay(u16 i)
{
while(i--);
}
void keydown()
{
if(k1==0)
{
delay(100);//消抖
if(k1==0)
{
led=~led;
}
//while(k1!=0);
}
}
void main()
{
keydown();
}
6、矩阵按键
/**************************************************************************************
* 矩阵按键实验 *
实现现象:下载程序后数码管显示0,按下矩阵按键上的按键显示对应的数字
S1-S4:0-3
S5-S8:4-7
S9-S12:8-B
S13-S16:C-F。
注意事项:如果不想让点阵模块显示,可以将74HC595模块上的JP595短接片拔掉。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
#define GPIO_DIG P0
#define GPIO_KEY P1
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
u8 KeyValue; //用来存放读取到的键值
u8 code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//显示0~F的值
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*******************************************************************************
* 函 数 名 : KeyDown
* 函数功能 : 检测有按键按下并读取键值
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void KeyDown(void)
{
char a=0;
GPIO_KEY=0x0f;
if(GPIO_KEY!=0x0f)//读取按键是否按下
{
delay(1000);//延时10ms进行消抖
if(GPIO_KEY!=0x0f)//再次检测键盘是否按下
{
//测试列
GPIO_KEY=0X0F;
switch(GPIO_KEY)
{
case(0X07): KeyValue=0;break;
case(0X0b): KeyValue=1;break;
case(0X0d): KeyValue=2;break;
case(0X0e): KeyValue=3;break;
}
//测试行
GPIO_KEY=0XF0;
switch(GPIO_KEY)
{
case(0X70): KeyValue=KeyValue;break;
case(0Xb0): KeyValue=KeyValue+4;break;
case(0Xd0): KeyValue=KeyValue+8;break;
case(0Xe0): KeyValue=KeyValue+12;break;
}
while((a<50)&&(GPIO_KEY!=0xf0)) //检测按键松手检测
{
delay(1000);
a++;
}
}
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
LSA=0; //给一个数码管提供位选
LSB=0;
LSC=0;
while(1)
{
KeyDown(); //按键判断函数
GPIO_DIG=smgduan[KeyValue]; //
}
}
7、外部中断
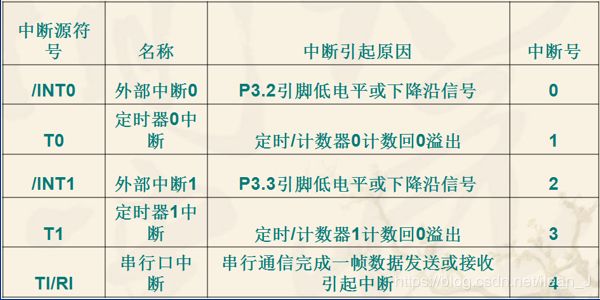
中断响应条件:
- 中断源有中断请求;
- 此中断源的中断允许位为1;
- CPU开中断(EA=1)
/**************************************************************************************
* 外部中断0实验 *
实现现象:下载程序后按下K3按键可以对D1小灯状态取反。
注意事项:无。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit k3=P3^2; //定义按键K3
sbit led=P2^0; //定义P20口是led
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*******************************************************************************
* 函 数 名 : Int1Init()
* 函数功能 : 设置外部中断1
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Int0Init()
{
//设置INT0
IT0=1;//跳变沿出发方式(下降沿)
EX0=1;//打开INT0的中断允许。
EA=1;//打开总中断
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
Int0Init(); // 设置外部中断0
while(1);
}
/*******************************************************************************
* 函 数 名 : Int0() interrupt 0
* 函数功能 : 外部中断0的中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Int0() interrupt 0 //外部中断0的中断函数
{
delay(1000); //延时消抖
if(k3==0)
{
led=~led;
}
}
8、定时器,计数器
1 x 机器周期 = 6 x 状态周期 = 12 x 振荡周期
指令周期以机器周期为单位
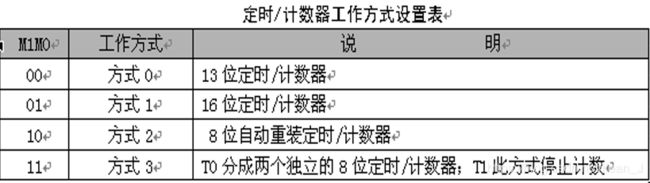
初始化程序应完成如下工作:
- 对TMOD赋值,以确定 T0 和 T1 的工作方式;
- 计算初值,并将其写入 TH0 、TL0 或 TH1 、TL1;
- 对EA赋值,开放定时器中断;
- 使 TR0 或 TR1 置位,启动定时/计数器定时或计数
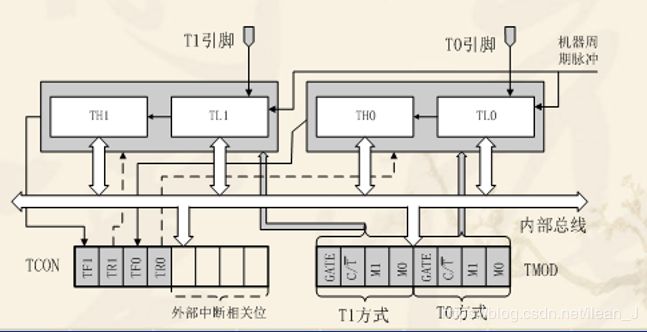
控制寄存器TCON
- TF1(TCON.7):T1溢出中断请求标志位。T1计数溢出时由硬件自动置TF1为1。CPU响应中断后TF1由硬件自动清0。T1工作时,CPU可随时查询TF1的状态。所以,TF1可用作查询测试的标志。TF1也可以用软件置1或清0,同硬件置1或清0的效果一样。
- TR1(TCON.6):T1运行控制位。TR1置1时,T1开始工作;TR1置0时,T1停止工作。TR1由软件置1或清0。所以,用软件可控制定时/计数器的启动与停止。
- TF0(TCON.5):T0溢出中断请求标志位,其功能与TF1类同。
- TR0(TCON.4):T0运行控制位,其功能与TR1类同.

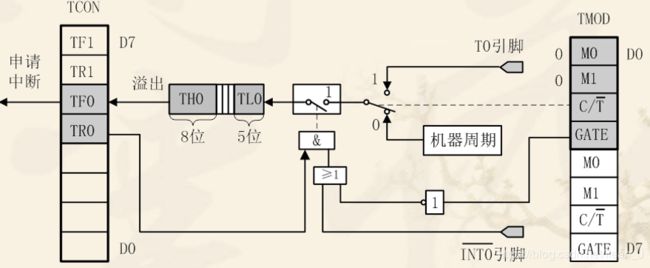
GATE
- 当GATE=0时,经反相后使或门输出为1,此时仅由TR0控制与门的开启,与门输出1时,控制开关接通,计数开始;
- 当GATE=1时,由外中断引脚信号控制或门的输出,此时控制与门的开启由外中断引脚信号和TR0共同控制。当TR0=1时,外中断引脚信号引脚的高电平启动计数,外中断引脚信号引脚的低电平停止计数。
这种方式常用来测量外中断引脚上正脉冲的宽度。
/**************************************************************************************
* 定时器0实验 *
实现现象:下载程序后D1小灯循环点亮1秒,熄灭1秒。使用单片机内部定时器可以实现准确延时。
注意事项:无。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit led=P2^0; //定义P20口是led
/*******************************************************************************
* 函 数 名 : Timer0Init
* 函数功能 : 定时器0初始化
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Timer0Init()
{
TMOD|=0X01;//选择为定时器0模式,工作方式1,仅用TR0打开启动。
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
Timer0Init(); //定时器0初始化
while(1);
}
/*******************************************************************************
* 函 数 名 : void Timer0() interrupt 1
* 函数功能 : 定时器0中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Timer0() interrupt 1
{
static u16 i;
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
i++;
if(i==1000)
{
i=0;
led=~led;
}
}
9、串口
/**************************************************************************************
* 串口通信实验 *
实现现象:下载程序后打开串口调试助手,将波特率设置为4800,选择发送的数据就可以显示
在串口助手上。
注意事项:无。
***************************************************************************************/
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
/*******************************************************************************
* 函数名 :UsartInit()
* 函数功能 :设置串口
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void UsartInit()
{
SCON=0X50; //设置为工作方式1
TMOD=0X20; //设置计数器工作方式2
PCON=0X80; //波特率加倍
TH1=0XF3; //计数器初始值设置,注意波特率是4800的
TL1=0XF3;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
UsartInit(); // 串口初始化
while(1);
}
/*******************************************************************************
* 函数名 : Usart() interrupt 4
* 函数功能 : 串口通信中断函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void Usart() interrupt 4
{
u8 receiveData;
receiveData=SBUF;//出去接收到的数据
RI = 0;//清除接收中断标志位
SBUF=receiveData;//将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}