本篇简介
在系列的第五小节我们曾提到过,在需要与现实场景进行交互的应用中,例如在进行AR绘制、3D场景重建时,作为连接现实世界与图像世界的纽带,相机的参数起着至关重要的作用。而相机标定工具的目的,就是通过对标准模式图像的处理,计算出相机的各类参数。
本小节我们就来使用QCvUtils基础包实现一个相机标定工具。
原理简介
如系列第五小节所述,相机的标定数据可以分为两类:
- 内部参数(intrinsic parameters):包括相机的焦距、相平面中心坐标和扭曲参数等相机本身属性参数。
- 外部参数(extrinsic parameters):相机相对世界坐标系的位置信息,包括相对于三个坐标轴的旋转和相对于原点的平移。
具体而言,借用OpenCV官方相机校准说明文档的一张公式图:
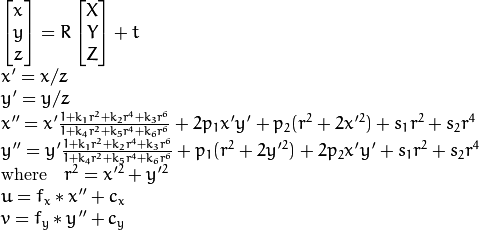
公式描述了真实世界坐标(大写的XYZ)到图像坐标(uv)的映射。不同拍摄角度下的相机外部参数均不相同,需要在实际的场景中才能确定。而内部参数与拍摄场景无关,可以通过一组从标准模式(例如棋盘格)中采集的真实坐标和图像坐标,事先求解计算出来。我们本篇要实现的相机标定工具,就是要实现:
- 标定坐标数据的便捷采集
以及 - 相机内部参数的自动计算和导出
具体的计算原理在这里就不作详细展开了,有兴趣的话可以参考官方文档的相关说明。接下来我们重点关注如何使用OpenCV的Calib3D工具包和我们的QCvUtils基础包实现这个标定工具。
实现棋盘格角点检测滤波器QCvEdgePtFilter
秉承上文所述,我们首先要实现标定坐标数据的便捷采集。对此,我们需要对视频流中出现的棋盘格进行处理。为此,需要实现的主要功能为:
- 根据棋盘格行、列数配置,检测采集到图像帧棋盘格的角点,并将检测到的角点坐标发送给内参计算模块
按照先前已实现各类场景的思路,我们首先来实现供QCvCamView控件使用的角点检测滤波器QCvEdgePtFilter,声明如下:
class QCvEdgePtFilter : public QCvMatFilter
{
Q_OBJECT
public:
explicit QCvEdgePtFilter(QString name, QObject* parent = nullptr) : QCvMatFilter(name, parent) {}
virtual ~QCvEdgePtFilter() { m_pointbuf.clear(); }
public:
void setColCnt(const int& colCnt) { m_colCnt = colCnt; }
void setRowCnt(const int& rowCnt) { m_rowCnt = rowCnt; }
signals:
void imgPtsCaptured(const std::vector& imgPts,
const int& colCnt, const int& rowCnt,
const cv::Size& imgSize);
public slots:
void onCapture();
protected:
virtual void execFilter(const cv::Mat& inMat, cv::Mat& outMat);
private:
int m_colCnt;
int m_rowCnt;
std::vector m_pointbuf;
cv::Size m_imgSize;
};
除了QCvMatFilter要求实现的执行滤波方法execFilter外,从声明中可以看出这个滤波器还实现了以下功能:
- 提供输入棋盘格行、列数量的入口,即各类setter方法
- 提供棋盘角点的发送出口,借助Qt的信号机制实现(imgPtsCaptured信号)
- 触发数据采集的槽onCapture
execFilter方法具体实现如下:
void QCvEdgePtFilter::execFilter(const cv::Mat& inMat, cv::Mat& outMat)
{
if (m_colCnt <= 1 || m_rowCnt <= 1)
{
qDebug() << "BOARD SIZE EMPTY!";
outMat = inMat.clone();
}
cv::Mat frameGray;
cv::cvtColor(outMat, frameGray, cv::COLOR_BGR2GRAY);
//-- Detect corners
m_pointbuf.clear();
bool found = cv::findChessboardCorners(frameGray, cv::Size(m_colCnt, m_rowCnt),
m_pointbuf, cv::CALIB_CB_ADAPTIVE_THRESH |
cv::CALIB_CB_FAST_CHECK);
if (found)
{
cv::cornerSubPix(frameGray, m_pointbuf, cv::Size(11, 11),
cv::Size(-1, -1),
cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::COUNT,
30, 0.1));
m_imgSize = outMat.size();
for (size_t i = 0; i < m_pointbuf.size(); i++)
{
cv::ellipse(outMat, m_pointbuf[i],
cv::Size(5, 5), 0, 0, 360,
cv::Scalar(255, 0, 255), 4, 8, 0);
}
}
}
这其中核心的处理就是OpenCV提供的findChessboardCorners方法,将灰度图像及棋盘格大小传入后,这个方法会检测出图中所有的角点,并将坐标按顺序存储到缓存数组m_pointbuf中。
如果从采集到的图像帧中顺利检测到了棋盘格角点,滤波器还会进一步使用角点亚像素精细化方法(cornerSubPix)提升角点坐标精度,之后将计算得到的角点绘制在图像帧上。
完成了上面的实现,在需要采集标定坐标数据时,只需要将缓存数组中的数据发送出去就可以了:
void QCvEdgePtFilter::onCapture()
{
if(!m_pointbuf.empty())
{
emit imgPtsCaptured(m_pointbuf, m_colCnt, m_rowCnt, m_imgSize);
}
}
注: 需要特别说明的是,为了避免边界问题,OpenCV处理棋盘格图像时会舍弃最外圈的一层棋盘格,因此棋盘格左上角会从第二行第二列的格子开始计算。后文将依照此约定进行说明。
实现相机标定器CamCalibrator
完成了标定坐标的采集,下一步自然是实现对所采集数据进行处理的模块,也就是下面所声明的相机标定器CamCalibrator类:
class CamCalibrator : public QObject
{
Q_OBJECT
public:
explicit CamCalibrator(QObject* parent = nullptr);
public:
void setSquareWidth(const float& width) { m_squareWidth = width; }
void setSquareHeight(const float& height) { m_squareHeight = height; }
signals:
void calibrated(QString result);
public slots:
void onImgPts(const std::vector& imgPts,
const int& colCnt, const int& rowCnt,
const cv::Size& imgSize);
void reset();
void saveResults(QString fileName);
private:
template
void checkAndPushData(std::vector& vector, const T& data);
void runCalibration(const cv::Size& imgSize);
void showParams();
private:
float m_squareWidth;
float m_squareHeight;
std::vector> m_imgPts;
std::vector> m_objPts;
cv::Mat m_cameraMatrix;
cv::Mat m_distCoeffs;
double m_rms;
};
这其中设置棋盘格真实宽高的两个setter方法和一些零散的工具方法就不在这里展开说明了,我们重点看一下实现核心功能的几个方法。首先是接收上文imgPtsCaptured信号的槽方法onImgPts:
void CamCalibrator::onImgPts(const std::vector& imgPts,
const int& colCnt, const int& rowCnt,
const cv::Size& imgSize)
{
if (m_squareHeight >= 0 && m_squareWidth >= 0 && imgPts.size() > 0)
{
checkAndPushData(m_imgPts, imgPts);
//calculate object points;
std::vector corners;
for (int i = 0; i < rowCnt; i++)
{
for (int j = 0; j < colCnt; j++)
{
corners.push_back(cv::Point3f(float(j * m_squareHeight),
float(i * m_squareWidth), 0));
}
}
checkAndPushData(m_objPts, corners);
runCalibration(imgSize);
showParams();
}
}
可以看到这个方法调用了其他三个方法,这三个方法对应了处理标定坐标数据的四个基本步骤:
- 将采集到的图像坐标点添加到图像坐标缓存中( checkAndPushData(m_imgPts, imgPts) );
- 根据配置的棋盘格真实大小,依次计算角点在真实世界的坐标。这里为了方便计算,将真实世界的坐标系原点设定在了棋盘格左上角(即第二行第二列格子的左上角,之后不再赘述)。计算得到的结果将被添加到真实坐标缓存中( checkAndPushData(m_objPts, corners) );
- 读取缓存中所有的坐标,执行标定计算
- 将标定结果展示到界面上
这几个步骤中最重要的执行标定操作实现如下:
void CamCalibrator::runCalibration(const cv::Size& imgSize)
{
std::vector rvecs, tvecs;
m_cameraMatrix = cv::Mat::eye(3, 3, CV_64F);
m_distCoeffs = cv::Mat::zeros(8, 1, CV_64F);
m_rms = cv::calibrateCamera(m_objPts, m_imgPts,
imgSize, m_cameraMatrix, m_distCoeffs, rvecs, tvecs);
}
也就是使用了OpenCV提供的calibrateCamera方法。标定的计算结果将缓存到m_cameraMatrix和m_distCoeffs变量中,同时标定结果的误差参考值会被缓存到m_rms变量里。
而最终标定结果的展示,通过向主界面发射calibrated信号实现,这里就不作展开说明了。
相机标定器的另一个重要功能是标定结果的导出。这里我们使用了OpenCV提供的FileStorage工具,可以很方便地以统一的存储格式实现标定数据的读写,具体如下:
void CamCalibrator::saveResults(QString fileName)
{
cv::FileStorage fs(fileName.toStdString().c_str(), cv::FileStorage::WRITE);
fs << "calibration_time" << QDateTime::currentDateTime().toString("yyyy-MM-dd HH:mm:ss").toStdString().c_str();
fs << "nframes" << (int) m_objPts.size();
fs << "rms" << m_rms;
fs << "camera_matrix" << m_cameraMatrix;
fs << "distortion_coefficients" << m_distCoeffs;
}
使用这个方法存储得到的标定数据格式如下:
{
"calibration_time": "2018-03-08 19:21:13",
"nframes": 11,
"camera_matrix": {
"type_id": "opencv-matrix",
"rows": 3,
"cols": 3,
"dt": "d",
"data": [ 8.4446356735928168e+02, 0.0, 3.1252015703842346e+02,
0.0, 8.3814268020345060e+02, 2.5160161633730544e+02, 0.0,
0.0, 1.0 ]
},
"distortion_coefficients": {
"type_id": "opencv-matrix",
"rows": 5,
"cols": 1,
"dt": "d",
"data": [ 2.8536755267484618e-02, 8.9133754139324750e-01,
9.8503195767350336e-04, 5.1203070506036933e-03,
-3.0186480045338673e+00 ]
}
}
界面实现
完成了两个核心功能模块的开发,最后我们通过界面将这些功能串起来。
整体界面设计如下:
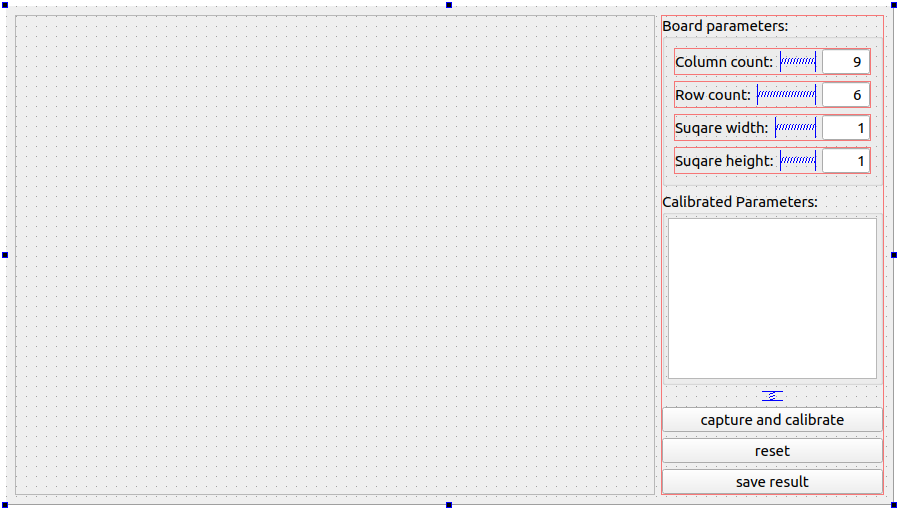
其中左侧嵌入视频流控件,右上提供棋盘格配置的入口,右下为标定的各类操作按钮和标定结果展示的控件。具体界面布局相关的实现细节就不详细说明了,这里列举几个关键的实现:
首先是在视频流控件中添加角点检测滤波器,并将棋盘格行列数设置控件与滤波器提供的设置入口绑定:
QString edgePtFilterName = "EdgePt";
QCvEdgePtFilter* filter = new QCvEdgePtFilter(edgePtFilterName);
int boardCol = ui->editBoardCol->text().toInt();
int boardRow = ui->editBoardRow->text().toInt();
filter->setColCnt(boardCol);
filter->setRowCnt(boardRow);
filter->setEnabled(true);
m_camView->appendFilter(filter);
connect(ui->editBoardCol, &QLineEdit::textChanged, this, [this, filter](QString newCol) {
filter->setColCnt(newCol.toInt());
});
connect(ui->editBoardRow, &QLineEdit::textChanged, this, [this, filter](QString newRow) {
filter->setRowCnt(newRow.toInt());
});
与此类似,将棋盘格真实宽度的设置控件与相机标定器的设置入口绑定:
CamCalibrator* calibrator = new CamCalibrator(this);
calibrator->setSquareWidth(ui->editSquareWidth->text().toFloat());
calibrator->setSquareHeight(ui->editSquareHeight->text().toFloat());
connect(ui->editSquareHeight, &QLineEdit::textChanged, this, [this, calibrator](QString newH) {
calibrator->setSquareHeight(newH.toFloat());
});
connect(ui->editSquareWidth, &QLineEdit::textChanged, this, [this, calibrator](QString newW) {
calibrator->setSquareWidth(newW.toFloat());
});
然后将滤波器发送数据的信号与标定器接收数据的槽连接起来:
connect(filter, &QCvEdgePtFilter::imgPtsCaptured, calibrator, &CamCalibrator::onImgPts);
在点击采集按钮时,触发滤波器的采集操作:
connect(ui->btnCapture, &QPushButton::clicked, this, [this, filter](){
...
// 省略界面控件和布局相关操作
filter->onCapture();
});
最后,将存储参数按钮绑定到标定器提供的存储方法:
connect(ui->btnSave, &QPushButton::clicked, this, [this, calibrator](){
m_camView->onStreamSwitch(false);
QString timeStample = QDateTime::currentDateTime().toString("yyyyMMddHHmmss");
QString saveFileName = QFileDialog::getSaveFileName(this, tr("Save Calibration Results"),
QString("./%1.json").arg(timeStample),
tr("Config Files(*.json *.xml *.yml);;All Files(*)"));
if (!saveFileName.isEmpty())
{
calibrator->saveResults(saveFileName);
}
m_camView->onStreamSwitch(true);
});
测试标定效果
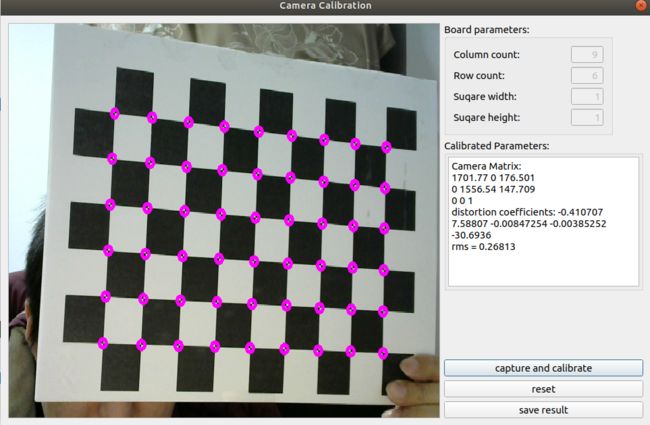
使用实现完成的标定工具测试效果如下图:
注:因为笔者这里使用的是用硬纸板自制的简易标定版,所以计算得到的结果会有比较大的误差。实际场景中使用精度更高的标定板可以得到更精确的标定结果。
有关相机标定工具的实现就说明到这里。下一节我们将使用这些标定参数实现一个较为复杂的应用。
>>本篇参考代码
>>返回系列索引
参考链接
[1] OpenCV官方相机校准说明文档