ubuntu16.04安装配置azure_kinect驱动和ros驱动
0序言
azure kinect官方的驱动版本是ubuntu18.04,但是我使用的是ubuntu16.04,安装配置的踩坑过程说艰难是耗费的时间,说简单就是配置选项不对。特此记录
1升级cmake
软件包编译要求,首先要升级cmake,可以参考:
https://blog.csdn.net/u013834525/article/details/88524603
在不卸载之前旧版本的情况下安全的进行升级cmake,现在我们这里需要下载cmake-3.14.5.tar.gz文件,然后按照上面链接里的步骤走就好。cmake下载地址为:
https://cmake.org/files/
2下载libdepthengine.so.2.0文件
下载地址为:
https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/
需要下载两个:libk4a1.2-dev/ 和libk4a1.2/两个文件,解压后获得libdepthengine.so.2.0文件,然后把libdepthengine.so.2.0复制到/usr/lib/x86_64-linux-gnu/文件夹中。剩余文件不要删除,还有用。
3修改子模块
修改方案1
打开Azure-Kinect-Sensor-SDK文件夹,ctrl+h打开隐藏显示项,找到.gitmodules文件,修改在墙外的软件包url,即libyuv软件包,改成:
url=https://github.com/lemenkov/libyuv.git
保存完成。
修改方案2
gedit .gitmodules
然后根据里面的url下载相应的包,放在extern文件夹里面,然后编辑extern文件夹里面的cmakelist文件,将注释之后,add_subdirectory之前的判断包存不存在要不要更新的语句删除。
保存完成。
4安装k4a-tools
根据官方给的链接配置好 仓库秘钥:
https://docs.microsoft.com/en-us/windows-server/administration/linux-package-repository-for-microsoft-software
安装
sudo apt install libk4a1.2-dev
sudo apt install k4a-tools
如果安装过程中出现 libsoundio error, 则需要安装 jack-tools
sudo apt-get install jack-tools
5编译
这里有个巨坑:
cd Azure-Kinect-Sensor-SDK
mkdir build
cd build
cmake .. -G Ninja -DYAML_BUILD_SHARED_LIBS=ON ##就是这个选项,不加会编译错误
ninja
sudo ninja install
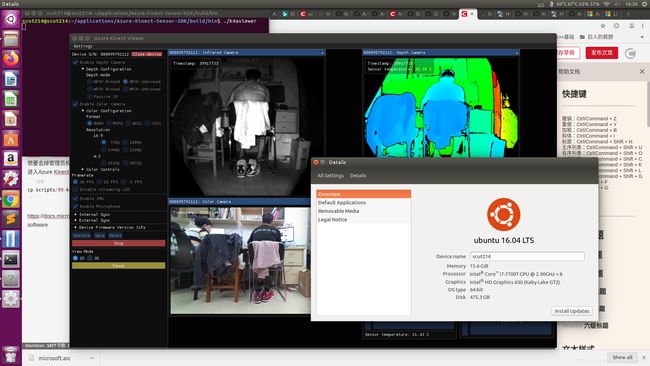
不出意外可以编译成功,然后就可以,嘿嘿嘿:
sudo ./bin/k4aviewer
想要去掉管理员权限也能启动:
进入Azure Kinect sdk 源码根目录中 scripts 文件夹,复制99-k4a.rules文件至/etc/udev/rules.d/
cp scripts/99-k4a.rules /etc/udev/rules.d/.
效果:
///////////////////////////////////////////////////////////////////////分割线///////////////////////////////////////////////////////////////////////////////
6下载ros驱动
git clone https://github.com/microsoft/Azure_Kinect_ROS_Driver.git
找到Azure_Kinect_ROS_Driver/include/azure_kinect_ros_driver/k4a_ros_device.h文件,更改:
@@ -117,11 +117,11 @@ class K4AROSDevice
volatile bool running_;
// Last capture timestamp for synchronizing playback capture and imu thread
- std::atomic_int64_t last_capture_time_usec_;
+ std::atomic<int64_t> last_capture_time_usec_;
// Last imu timestamp for synchronizing playback capture and imu thread
- std::atomic_uint64_t last_imu_time_usec_;
- std::atomic_bool imu_stream_end_of_file_;
+ std::atomic<uint64_t> last_imu_time_usec_;
+ std::atomic<bool> imu_stream_end_of_file_;
// Threads
std::thread frame_publisher_thread_;
7收集库文件
1 在工作空间中的/Azure_Kinect_ROS_Driver 里 创建文件夹:
mkdir -p ext/sdk
2 在之前编译安装的Azure-Kinect-Sensor-SDK/build/文件夹中有个bin文件夹,拷贝到sdk文件夹中
3 在之前下载的两个deb包(libk4a1.2-dev/ 和libk4a1.2/)中提取include和bin文件夹,最终汇集成include文件夹和bin文件夹,放在sdk文件夹中。
4回到工作空间:
catkin_make
catkin_make install
然后:
source ./devel/setup.bash
roslaunch azure_kinect_ros_driver driver.launch

大功告成。