OpenCV3 学习笔记3 ------ 图像轮廓查找与绘制
原文链接:https://blog.csdn.net/guduruyu/article/details/69220296
查找图像的轮廓在图像处理及应用中扮演着重要的角色。那么什么是轮廓(contour)?《Learning OpenCV 3》中给出的定义是这样的——轮廓即是以某种方式表示图像中的曲线的点的列表。这种表示可以根据实际的情形不同而不同。表示一条曲线的方式有很多种。OpenCV中,轮廓是由STL风格的vector<>模板对象表示的,其中vector中的每个元素都编码了曲线上,下一点的位置信息。
opencv2和opencv3中查找图像轮廓的函数是cv::findContours(),并通过cv::drawContours()将查找到的轮廓绘制到图像上。
1、轮廓的查找——cv::findContours()
函数cv::findContour是从二值图像中来计算轮廓的,它可以使用cv::Canny()函数处理的图像,因为这样的图像含有边缘像素;也可以使用cv::threshold()或者cv::adaptiveThreshold()处理后的图像,其边缘隐含在正负区域的交界处。
轮廓的层级结构
下图所示了cv::findCountour()的基本功能,图的上部是一幅测试图像,其背景为白色,并含有数个彩色的的区域(标签A到E)。图中也绘制出了由cv::findContours()所确定的轮廓。这些轮廓被标记为cX或hX,其中c代表“contour(轮廓)”,h代表“洞(hole)”,而X是一些数字。有些轮廓使用虚线表示的,他们表示白色区域(即非零区域)的外部边界。OpenCV和cv::findContour()对这些外部边界和图中的点线,即内部边界或者是洞的外部边界,进行区分的。
如图的下半部分,OpenCV可以将找到的轮廓组织成轮廓树,表示其轮廓结构的包围关系。对于测试图像中的轮廓,我们将根节点处的轮廓称为c0,而“洞”h00和h01是其子节点。反过来这些子节点又会包含新的子节点以此类推。

表示这种树的方式有很多种,OpenCV中使用数组(尤其是vectors)来表示这种树,其中数组中的每个条目都代表一个特定的轮廓,每个条目包含一个由4个整数组成的集合(通常表示为cv :: Vec4i类型的元素,就像四通道数组中的条目一样)。对于每个节点来说,四个元素所表示的含义分别如下:0号元素表示下一个轮廓(同一层级);1号元素表示前一个轮廓(同一层级);2号元素表示第一个子轮廓(下一层级);3号元素表示父轮廓(上一层级)。
"vector
使用cv::findContours()查找轮廓
cv::findContours()的具体调用有两种方式,具体如下:
void cv::findContours(
cv::InputOutputArray image, // 输入的8位单通道“二值”图像
cv::OutputArrayOfArrays contours, // 包含points的vectors的vector
cv::OutputArray hierarchy, // (可选) 拓扑信息
int mode, // 轮廓检索模式
int method, // 近似方法
cv::Point offset = cv::Point() // (可选) 所有点的偏移
);
void cv::findContours(
cv::InputOutputArray image, // 输入的8位单通道“二值”图像
cv::OutputArrayOfArrays contours, // 包含points的vectors的vector
int mode, // 轮廓检索模式
int method, // 近似方法
cv::Point offset = cv::Point() // (可选) 所有点的偏移
);其中,第一个参数是输入图像,图像的格式是8位单通道的图像,并且被解析为二值图像(即图中的所有非零像素之间都是相等的)。
第二个参数是一个数组的数组,在多数实际的操作中即是STL vectors的STL vector,这里将使用找到的轮廓的列表进行填充(即,这将是一个contours的vector,其中contours[i]表示一个特定的轮廓,这样,contours[i][j]将表示contour[i]的一个特定的端点)。
第三个参数,hierarchy,这个参数可以指定,也可以不提指定。如果指定的话,输出hierarchy,将会描述输出轮廓树的结构信息。其中包含的具体信息前面已经说明(四个条目)。
下一个参数,轮廓的模式,将会告诉OpenCV你想用何种方式来对轮廓进行提取,有四个可选的值,具体如下图:
cv::RETR_EXTERNAL:表示只提取最外面的轮廓;
cv::RETR_LIST:表示提取所有轮廓并将其放入列表;
cv::RETR_CCOMP:表示提取所有轮廓并将组织成一个两层结构,其中顶层轮廓是外部轮廓,第二层轮廓是“洞”的轮廓;
cv::RETR_TREE:表示提取所有轮廓并组织成轮廓嵌套的完整层级结构。

下一个参数是见识方法,即轮廓如何呈现的方法,有三种可选的方法:
cv::CHAIN_APPROX_NONE:将轮廓中的所有点的编码转换成点;
cv::CHAIN_APPROX_SIMPLE:压缩水平、垂直和对角直线段,仅保留它们的端点;
cv::CHAIN_APPROX_TC89_L1 or cv::CHAIN_APPROX_TC89_KCOS:应用Teh-Chin链近似算法中的一种风格
最后一个参数是偏移,可选,如果是定,那么返回的轮廓中的所有点均作指定量的偏移。
2、轮廓的绘制——cv::drawContours()
cv::drawContours()用于绘制cv::findContours()找到的轮廓。使用方法其实和OpenCV3中常用的绘图函数类似。具体调用方法如下:
void cv::drawContours(
cv::InputOutputArray image, // 用于绘制的输入图像
cv::InputArrayOfArrays contours, // 点的vectors的vector
int contourIdx, // 需要绘制的轮廓的指数 (-1 表示 "all")
const cv::Scalar& color, // 轮廓的颜色
int thickness = 1, // 轮廓线的宽度
int lineType = 8, // 轮廓线的邻域模式('4'邻域 或 '8'邻域)
cv::InputArray hierarchy = noArray(), // 可选 (从 findContours得到)
int maxLevel = INT_MAX, // 轮廓中的最大下降
cv::Point offset = cv::Point() // (可选) 所有点的偏移
)
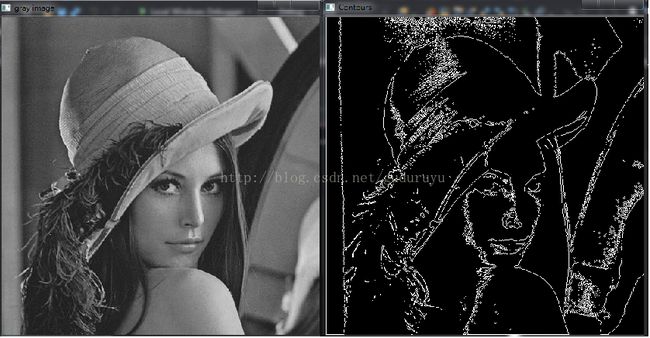
下面是这两个函数的实际使用示例:
cv::Mat image_gray = cv::imread("lena.jpg", cv::IMREAD_GRAYSCALE);
cv::Mat image_binary;
cv::threshold(image_gray, image_binary, 100, 255, cv::THRESH_BINARY);
std::vector< std::vector< cv::Point> > contours;
cv::findContours(
image_binary,
contours,
cv::noArray(),
cv::RETR_LIST,
cv::CHAIN_APPROX_SIMPLE
);
image_binary = cv::Scalar::all(0);
cv::drawContours(image_binary, contours, -1, cv::Scalar::all(255));
cv::imshow("gray image", image_gray);
cv::imshow("Contours", image_binary);
cv::waitKey(0);
return;