Apollo激光雷达3D障碍物感知
参见:Apollo公众号开发者说
开发者说上面的很多核心代码目前在GitHub上没有,只有开发者提供的方法和部分实现代码,另外推荐一篇关于单目摄像头的物体检测
目录
- 激光雷达参数
- 激光雷达模块的功能
- 高精地图ROI过滤
- CNN障碍物分割
- MinBox障碍物边框构建
- HM对象跟踪
激光雷达参数
Velodyne 64线激光雷达

Key Features:
- 64 Channels
- 120m range
- 2.2 Million Points per Second
- 360° Horizontal FOV
- 26.9° Vertical FOV
- 0.08° angular resolution (azimuth)
- <2cm accuracy
- ~0.4° Vertical Resolution
- User selectable frame rate
- Rugged Design
-Webpage for Velodyne HDL-64E S3: http://velodynelidar.com/hdl-64e.html
激光雷达模块的功能
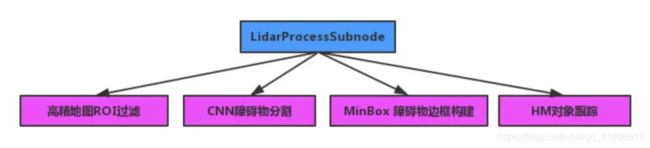
高精地图ROI过滤
具体步骤分为:
- 数据转换与ROI生成
- 坐标变换
- ROI LUT构造与点查询
- 点云筛选
详细内容
CNN障碍物分割
具体步骤分为:
- 通道特征提取
- 基于卷积神经网络的障碍物预测
- 障碍物集群
- 后期处理
详细内容
MinBox障碍物边框构建
- 高精地图ROI过滤器(HDMap ROI Filter)
- 基于卷积神经网络分割(CNNSegmentation)
- MinBox障碍物边框构建(MinBoxBuilder)
- HM对象跟踪(HM Object Tracker)等
详细内容
HM对象跟踪
详细内容