STM32CubeIDE HAL库操作IIC (一)配置篇
目录
一、MX配置
使能中断(可选):
DMA设置(可选):
二、生成的代码
三、IIC通信的三种方式(Polling、IT、DMA)(代码源自官方例程)
1、Polling (常用)
2、IT(开启中断,接收到数据时会调用回调函数)
3、DMA模式(回调函数同中断)
四、对IIC从设备的寄存器操作(适用于SHT21、MPU6050、AT24C02等)
一、MX配置
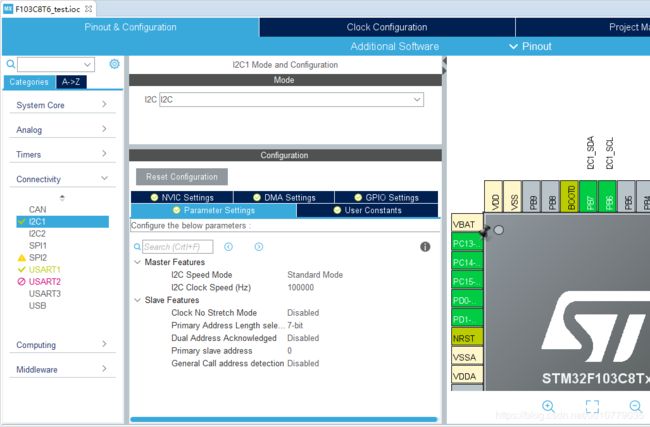
标准模式,100KHz时钟,7位地址
使能中断(可选):

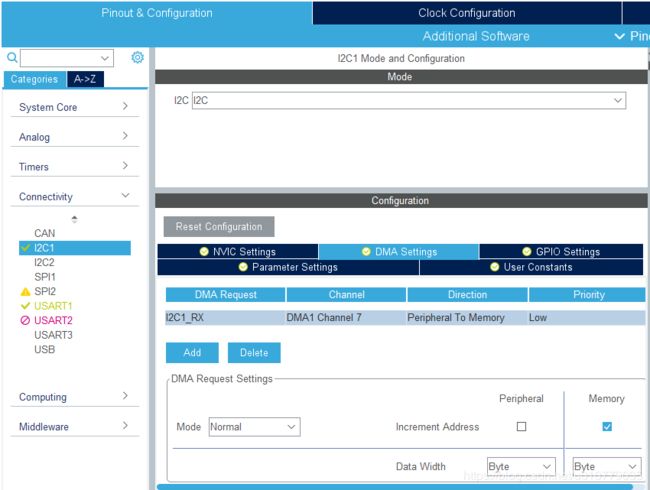
DMA设置(可选):
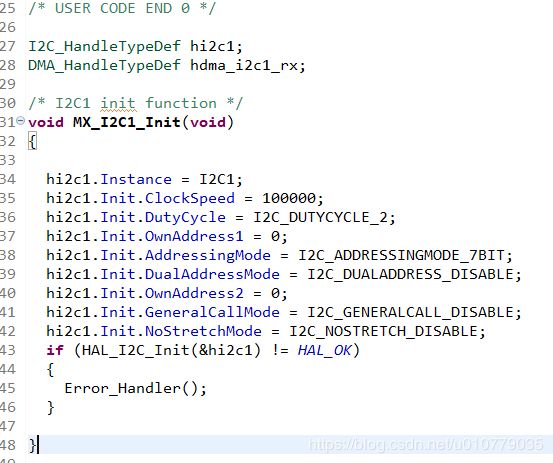
二、生成的代码
初始化函数
底层初始化

确定了引脚为开漏模式、时钟、DMA以及开启EV中断。
三、IIC通信的三种方式(Polling、IT、DMA)(代码源自官方例程)
1、Polling (常用)
//主机模式发送
/* Timeout is set to 10S */
while(HAL_I2C_Master_Transmit(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t*)aTxBuffer, TXBUFFERSIZE, 10000)!= HAL_OK)
{
/* Error_Handler() function is called when Timeout error occurs.
When Acknowledge failure occurs (Slave don't acknowledge its address)
Master restarts communication */
if (HAL_I2C_GetError(&hi2c1) != HAL_I2C_ERROR_AF)
{
Error_Handler();
}
}
//主机模式接收
/* Timeout is set to 10S */
while(HAL_I2C_Master_Receive(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t *)aRxBuffer, RXBUFFERSIZE, 10000) != HAL_OK)
{
/* Error_Handler() function is called when Timeout error occurs.
When Acknowledge failure occurs (Slave don't acknowledge it's address)
Master restarts communication */
if (HAL_I2C_GetError(&hi2c1) != HAL_I2C_ERROR_AF)
{
Error_Handler();
}
}
//从机模式接收
/* Timeout is set to 10S */
if(HAL_I2C_Slave_Receive(&hi2c1, (uint8_t *)aRxBuffer, RXBUFFERSIZE, 10000) != HAL_OK)
{
/* Transfer error in reception process */
Error_Handler();
}
//从机模式发送
/* Timeout is set to 10S */
if(HAL_I2C_Slave_Transmit(&hi2c1, (uint8_t*)aTxBuffer, TXBUFFERSIZE, 10000)!= HAL_OK)
{
/* Transfer error in transmission process */
Error_Handler();
}
//错误回调函数
/**
* @brief I2C error callbacks.
* @param I2cHandle: I2C handle
* @note This example shows a simple way to report transfer error, and you can
* add your own implementation.
* @retval None
*/
void HAL_I2C_ErrorCallback(I2C_HandleTypeDef *I2cHandle)
{
//
}2、IT(开启中断,接收到数据时会调用回调函数)
//主机模式中断发送
/* While the I2C in reception process, user can transmit data through
"aTxBuffer" buffer */
if(HAL_I2C_Master_Transmit_IT(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t*)aTxBuffer, TXBUFFERSIZE)!= HAL_OK)
{
/* Error_Handler() function is called in case of error. */
Error_Handler();
}
/*##-3- Wait for the end of the transfer ###################################*/
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
//主机模式中断接收
if(HAL_I2C_Master_Receive_IT(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)
{
/* Error_Handler() function is called in case of error. */
Error_Handler();
}
//主机模式发送回调函数
void HAL_I2C_MasterTxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//
}
//主机模式接收回调函数
void HAL_I2C_MasterRxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//
}
//从机模式中断接收
if(HAL_I2C_Slave_Receive_IT(&hi2c1, (uint8_t *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)
{
/* Transfer error in reception process */
Error_Handler();
}
/*##-3- Wait for the end of the transfer ###################################*/
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY)
{
}
//从机模式中断发送
/*##-4- Start the transmission process #####################################*/
/* While the I2C in reception process, user can transmit data through
"aTxBuffer" buffer */
if(HAL_I2C_Slave_Transmit_IT(&hi2c1, (uint8_t*)aTxBuffer, TXBUFFERSIZE)!= HAL_OK)
{
/* Transfer error in transmission process */
Error_Handler();
}
//从机模式发送回调函数
void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//
}
//从机模式接收回调函数
void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *I2cHandle)
{
//
}3、DMA模式(回调函数同中断)
//主机模式DMA发送
while(HAL_I2C_Master_Transmit_DMA(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t*)aTxBuffer, TXBUFFERSIZE)!= HAL_OK)
{
if (HAL_I2C_GetError(&hi2c1) != HAL_I2C_ERROR_AF)
{
Error_Handler();
}
}
/*##-3- Wait for the end of the transfer ###################################*/
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY);
//主机模式DMA接收
while(HAL_I2C_Master_Receive_DMA(&hi2c1, (uint16_t)I2C_ADDRESS, (uint8_t *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)
{
if (HAL_I2C_GetError(&hi2c1) != HAL_I2C_ERROR_AF)
{
Error_Handler();
}
}
//从机模式DMA发送
if(HAL_I2C_Slave_Receive_DMA(&hi2c1, (uint8_t *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)
{
Error_Handler();
}
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY);
//从机模式DMA接收
if(HAL_I2C_Slave_Transmit_DMA(&hi2c1, (uint8_t*)aTxBuffer, TXBUFFERSIZE)!= HAL_OK)
{
/* Transfer error in transmission process */
Error_Handler();
}
while (HAL_I2C_GetState(&hi2c1) != HAL_I2C_STATE_READY);
四、对IIC从设备的寄存器操作(适用于SHT21、MPU6050、AT24C02等)
下面对库函数的操作做了一次封装,函数前还可以加上 __STATIC_INLINE
I2C_Addr 器件地址,例如MPU6050为0xd0
reg 寄存器地址,例如陀螺仪配置寄存器 0x1B
data 操作数,例如操作陀螺仪配置寄存器数值0x18,开启满量程
*buf 读取数存储地址指针
uint8_t HALIIC_WriteByteToSlave(uint8_t I2C_Addr,uint8_t reg,uint8_t data)
{
uint8_t *pData;
pData = &data;
return HAL_I2C_Mem_Write(&hi2c1, I2C_Addr, reg, I2C_MEMADD_SIZE_8BIT, pData, 1, 100);
}
uint8_t HALIIC_ReadByteFromSlave(uint8_t I2C_Addr,uint8_t reg,uint8_t *buf)
{
return HAL_I2C_Mem_Read(&hi2c1, I2C_Addr, reg, I2C_MEMADD_SIZE_8BIT, buf, 1, 100);
}
uint8_t HALIIC_ReadMultByteFromSlave(uint8_t dev, uint8_t reg, uint8_t length, uint8_t *data)
{
return HAL_I2C_Mem_Read(&hi2c1, dev, reg, I2C_MEMADD_SIZE_8BIT, data, length, 200);
}
uint8_t HALIIC_WriteMultByteToSlave(uint8_t dev, uint8_t reg, uint8_t length, uint8_t* data)
{
return HAL_I2C_Mem_Write(&hi2c1, dev, reg, I2C_MEMADD_SIZE_8BIT, data, length, 200);
}