opencv dnn模块 示例(8) 语义分割 segmentation(ENet/fcn8s)
一、opencv的示例模型文件
opencv的dnn模块读取models.yml文件中包含的目标检测模型有2种,
ENet road scene segmentation network from https://github.com/e-lab/ENet-training
Works fine for different input sizes.
- enet:
model: “Enet-model-best.net”
mean: [0, 0, 0]
scale: 0.00392
width: 512
height: 256
rgb: true
classes: “enet-classes.txt”
sample: “segmentation” - fcn8s:
model: “fcn8s-heavy-pascal.caffemodel”
config: “fcn8s-heavy-pascal.prototxt”
mean: [0, 0, 0]
scale: 1.0
width: 500
height: 500
rgb: false
sample: “segmentation”
二、示例代码
#include 3、示例
(1) fcn8s-heavy-pascal 测试结果
person.jpg 原图,图例,结果图如下 (opencl 比 cpu慢2倍…)

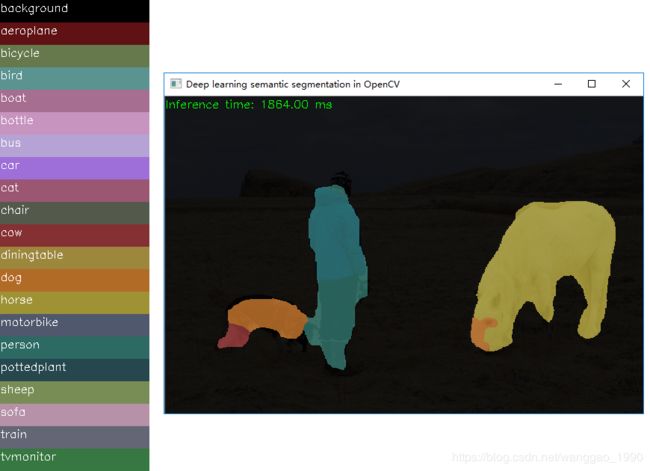
另外两张图结果
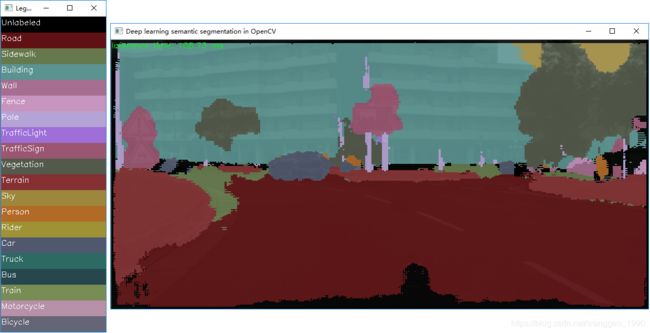
(2)Enet-model 测试结果
(opencl 比 cpu快3倍… 无语…)