串口通信——接收串口数据并处理(C语言)
本文主要内容包含:
1.接收串口数据程序的编程逻辑示意图;
2.接收串口数据程序要用到的通用函数模块(可直接引用,无需更改);
3.接收串口数据程序的示例。
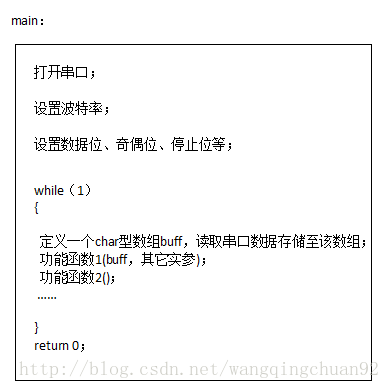
1.接收串口数据程序的编程逻辑示意图:
2.与串口有关的函数模块及数组(可直接引用到自己的程序中):
//设置波特率函数会用到的数组
int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300,
B38400, B19200, B9600, B4800, B2400, B1200, B300, };
int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300,
38400, 19200, 9600, 4800, 2400, 1200, 300, };
int OpenDev(char *Dev) //打开串口
{
int fd = open(Dev,O_RDWR | O_NOCTTY | O_NONBLOCK);
if(-1 == fd)
{
perror("Can't Open Serial Port");
return -1;
}
else
{
printf("Open com success!!!!!!!!!!!");
return fd;
}
}
void set_speed(int fd, int speed) //设置波特率
{
int i;
int status;
struct termios Opt;
tcgetattr(fd, &Opt);
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if (status != 0)
perror("tcsetattr fd1");
return;
}
tcflush(fd,TCIOFLUSH);
}
}
int set_Parity(int fd,int databits,int stopbits,int parity) //设置数据位、奇偶位、停止位等
{
struct termios options;
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(0);
}
bzero(&options,sizeof(options));
options.c_cflag |= CLOCAL | CREAD;
options.c_cflag &= ~CSIZE;
switch (databits) /*设置数据位*/
{
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size\n");
return (0);
}
switch (parity)/*设置校验位*/
{
case 'n':
case 'N':
options.c_cflag &= ~PARENB;
//options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= (INPCK | ISTRIP);
break;
case 'e':
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= (INPCK | ISTRIP);
break;
case 'S':
case 's':
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity\n");
return (0);
}
switch (stopbits)/*设置停止位*/
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
if (parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH);
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("SetupSerial 3");
return (0);
}
return (1);
}
3.示例:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define TRUE 1
#define FALSE 0
int analysis(char *buff);
int OpenDev(char *Dev);
void set_speed(int fd, int speed);
int set_Parity(int fd,int databits,int stopbits,int parity);
int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300, B38400, B19200, B9600, B4800, B2400, B1200, B300, };
int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9600, 4800, 2400, 1200, 300, };
int OpenDev(char *Dev)
{
int fd = open(Dev,O_RDWR | O_NOCTTY | O_NONBLOCK);
if(-1 == fd)
{
perror("Can't Open Serial Port");
return -1;
}
else
{
printf("Open com success!!!!!!!!!!!");
return fd;
}
}
void set_speed(int fd, int speed)
{
int i;
int status;
struct termios Opt;
tcgetattr(fd, &Opt);
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if (status != 0) perror("tcsetattr fd1");
return;
}
tcflush(fd,TCIOFLUSH);
}
}
int set_Parity(int fd,int databits,int stopbits,int parity)
{
struct termios options;
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
bzero(&options,sizeof(options));
options.c_cflag |= CLOCAL | CREAD;
options.c_cflag &= ~CSIZE;
switch (databits)
{
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default: fprintf(stderr,"Unsupported data size\n");
return (FALSE);
}
switch (parity)
{
case 'n':
case 'N':
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= (INPCK | ISTRIP);
break;
case 'e':
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= (INPCK | ISTRIP);
break;
case 'S':
case 's':
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default: fprintf(stderr,"Unsupported parity\n");
return (FALSE);
}
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default: fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
if (parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH);
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("SetupSerial 3");
return (FALSE);
}
return (TRUE);
}
int analysis (char *buff)
{
int i;
char *p;
p=buff;
for(i=0;i<255,i++)
{
printf("%s ",p[i]);
}
return 0;
}
void main(void)
{
int fd;
int nread;
char buff[255];
char *dev_name = "/dev/ttymxc4";//根据实际情况选择串口
while(1)
{
fd = OpenDev(dev_name); //打开串口
if(fd>0)
set_speed(fd,9600); //设置波特率
else
{
printf("Can't Open Serial Port!\n");
sleep(1);
continue;
}
break;
}
if(set_Parity(fd,8,1,'N')==FALSE) //设置校验位
{
printf("Set Parity Error\n");
exit(1);
}
while(1)
{
sleep(3);
nread = read(fd,buff,sizeof(buff));
if((nread>0))
{
printf("Success!\n");
}
analysis(buff);
}
}