CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数、双曲线、指数、对数的计算。该算法通过基本的加和移位运算代替乘法运算,使得矢量的旋转和定向的计算不再需要三角函数、乘法、开方、反三角、指数等函数。
本文是基于FPGA实现Cordic算法的设计与验证,使用Verilog HDL设计,初步可实现正弦、余弦、反正切函数的实现。将复杂的运算转化成FPGA擅长的加减法和乘法,而乘法运算可以用移位运算代替。Cordic算法有两种模式,旋转模式和向量模式。可以在圆坐标系、线性坐标系、双曲线坐标系使用。本文线初步实现在圆坐标系下的两种模式的算法实现。
Cordic算法简化

旋转模式,迭代位移算法。假设有一点P0(x0,y0),经过逆时针旋转角度θ,到达点Pm(xm,ym),我们根据数学运算可以得到公式如下:
xm = x0cosθ - y0sinθ = cosθ(x0 – y0tanθ)
ym = y0cosθ + x0sinθ = cosθ(y0 – x0tanθ)
如果不考虑旋转后的向量模值,只考虑旋转角度,即去掉cosθ,得到如下方程式。这里旋转的角度的正确的,但x和y的值增加。cosθ值是小于等于1的,值大于等于1,所以模值应该增大。我们不能通过适当的数学计算去掉cosθ,但是去掉cosθ项可以方便我们后面的坐标平面旋转的计算。这里称为伪旋转。
xm = x0 – y0tanθ
ym = y0 – x0tanθ
Cordic的方法核心就是伪旋转,将旋转角θ细化成若干个大小固定的角度θi,规定θi满足tanθi = 2^-i,通过一系列的迭代旋转,每次旋转θi,i为迭代次数,规定∑θi的范围即旋转角度θ的范围为[-99.7, 99.7]。如果θ的大于这个范围则可通过三角运算操作转化到该范围的角度。
我们通过事先将所有每次旋转的角度计算出来,由于每次旋转的角度是固定的,所以经过i次旋转的∑θi可能会超过θ,所以就必须设置一个方向值di,如果旋转角度之和已经小于θ,则di为1,下次旋转继续为顺时针旋转,如果旋转角度之和大于θ,则di为-1,下次旋转为逆时针。设置zi+1为旋转剩余角度,zi+1 = z0 – dizi,z0 = θ,随着i值得增大,zi+1会趋向于0时,即旋转结束。di与zi的符号位相同。
采用伪旋转的方法,每次提出一个cosθi,旋转结束后会产生一个∏cosθi的累乘,一旦我们确定了迭代次数,∏cosθi就是一个常数,迭代公式可写为。这是将cosθi提出、tanθi 替换成 2^-i后的结果。di与zi的符号位相同。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
设迭代i = n - 1,那么旋转n次后得到Pm的坐标应该为(xn * ∏cosθi, yn * ∏cosθi)。应为每次迭代都会提出一个cosθi,旋转n次后的xn和yn就会少乘一个∏cosθi,所以实际上最终的Pm坐标角度近似于(xn * ∏cosθi, yn * ∏cosθi)。
xn * ∏cosθi = x0cosθ - y0sinθ
yn * ∏cosθi = y0cosθ + x0sinθ
xn = 1/∏cosθi (x0cosθ – y0sinθ)
yn = 1/∏cosθi (y0cosθ – x0sinθ)
伸缩因子,KN = 1 / ∏cosθi,已知迭代次数,我们可以预先计算KN的值。如下这是博主使用MATLAB计算出的迭代结果数值。

xn =KN (x0cosθ – y0sinθ)
yn = KN (y0cosθ – x0sinθ)
从上表可以得出,我们预先计算出KN的值,然后令x0 = ∏cosθi,y0 = 0,则上述公式可化简为
xn = cosθ
yn = sinθ
即可实现正弦、余弦操作了。
旋转模式
总结一下,Cordic算法旋转模式使用Verilog HDL的实现流程
(1) 确定迭代次数,将每次迭代的角度计算出来,预先定义为参数,为了避免浮点运算,将角度值向左移位16位,取整数部分。
(2) 根据迭代公式进行迭代计算,本设计取16次迭代,从上表可以看出,当迭代次数越大时,1/∏cosθi会趋向于一个确定值。如果对结果精度要求更高,可以设置更高的迭代次数,根据迭代次数,可以将伸缩因子KN = 1/∏cosθi计算出来。同样将其左移16位。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
(3) 设置x0 = ∏cosθi,y0 = 0,则求出x16 = cosθ,y16 = sinθ。
这里需要注意的是,我们在进行迭代运算的时候,将2^-i变成移位运算,对于正余弦来说是有正负的,所以在一开始定义的时候,就应该定义成有符号数,Verilog中也可以定义有符号数,最高位表示符号位,定义如下
![]()
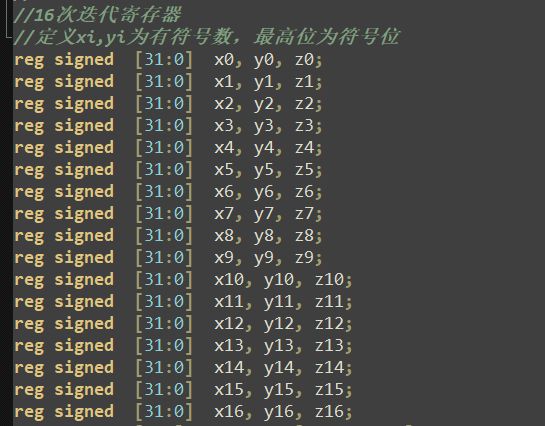
迭代寄存器定义为有符号数,那么我们移位运算就不能用>>逻辑右移<<逻辑左移或来移位了,而是用>>>算术右移和<<<算术左移。逻辑左移也就相当于算数左移,右边统一添0 ,逻辑右移,左边统一添0 ,算数右移,左边添加的数和符号有关。
例如1010_1010, []是添加的位
逻辑左移一位:0101_010[0]
算数左移一位:0101_010[0]
逻辑右移一位:[0]101_0101
算数右移一位:[1]101_0101
迭代运算采用16级流水线,进行运算,最终需要判断输出的正余弦值在哪个象限,前面讲旋转角度θ的范围为[-99.7,99.7],不在这个范围我们要进行三角运算使其满足这个范围,当输入的角度小于90度即可进行计算,当输入角度大于90度小于180度,将输入角度减去90度并设定当前角度处于第二象限,然后进行计算,当输入角度大于180度小于270度,将输入的角度减去180度设置当前角度处于第三象限,进行计算,当输入的角度大于270度,减去270设置当前角度处于第四象限,进行计算。象限的设定通过quarant寄存器实现。

如果角度在第一象限,sin(x) = sin(a),cos(x) = sin(a)最后的结果x16 = cosθ, y16 = sinθ,这里我想起了那句口诀,一全正,二正弦,三正切,四余弦
如果角度在第二象限,sin(x) = sin(a+90) = cos(a),cos(x) = cos(a+90) = -sin(a)
如果角度在第三象限,sin(x) = sin(a+180) = -sin(a),cos(x) = cos(a+180) = -cos(a)
如果角度在第四象限,sin(x) = sin(a+270) = cos(a),cos(x) = cos(a+270) = -sin(a)
对于正数,我们直接赋值输出,负数,这里使用有符号数表示,将其取反加1即可。最终使用modelsim对算法进行仿真,从波形图上看已经初步实现了sin,cos函数。

向量模式
Cordic算法在向量模式下的计算方法和旋转模式基本上是类似的,设有一点P0(x0, y0),经过顺时针旋转角度到与轴重合,得到点Pm(xm, ym),即ym = 0。
xm = x0cosθ - y0sinθ = cosθ(x0 – y0tanθ)
ym = y0cosθ + x0sinθ = cosθ(y0 – x0tanθ) = 0
我们设置x0 = x, y0 = y, z0 = 0,迭代次数为16,经过16次迭代后得到zn = θ = arctan(y/x)和坐标所代表的向量的模值d = xm = xn * ∏cosθi,di与yi方向相反,即当时结束运算。实现方法为判断yi的符号位,符号位为1,di为1,符号位为0,di为-1。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
关于反正切函数,由于在[-99.7°,99.7°]范围内,所以我们输入向量P0(x0, y0)时,需要保证其在第一、四象限。
下面是使用MATLAB计算出来的数据和FPGA计算出来的数据进行比较。

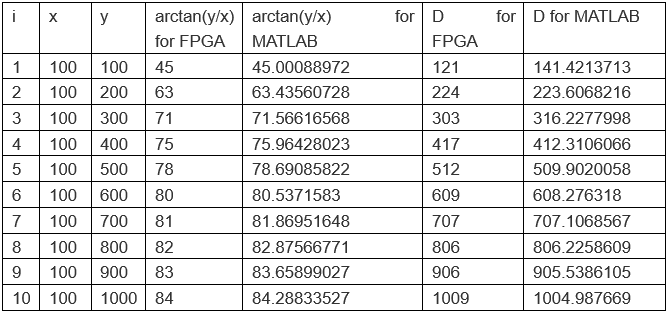
从FPGA计算出的结果与MATLAB来比较,和实际结果之间的误差还是挺小的,毕竟是硬件计算出来的数据,向量的误差就比较大了,如果对于精度比较高的计算,我们可以通过提高迭代次数来提高精度。至此基于FPGA的Cordic算法就实现结束了。
如果你想获得本设计所有的工程源码和参考资料,欢迎关注博主的微信订阅号【开源FPGA】,后台回复【开源FPGA】即可获得!总结、记录自己的学习过程,一个FPGA工程师的养成之路。欢迎加入开源FPGA-交流群-I进行讨论,群号码:677163633。
参考资料:
基于FPGA的CORDIC算法实现——Verilog版
Cordic算法——verilog实现

转载请注明出处:NingHeChuan(宁河川)
个人微信订阅号:开源FPGA
如果你想及时收到个人撰写的博文推送,可以扫描左边二维码(或者长按识别二维码)关注个人微信订阅号
知乎ID:NingHeChuan
微博ID:NingHeChuan
原文地址:http://www.cnblogs.com/ninghechuan/p/8681006.html