STM32F429 >> 11. ADC 模数转换
本工程板级支持包文件适用于野火stm32f429 开发板。
STM32F429IGT6 有 3 个 ADC,每个 ADC 有 12位、10 位、8 位和 6位可选,每个
ADC 有 16个外部通道。另外还有两个内部 ADC 源和 V BAT 通道挂在 ADC1上。ADC具有
独立模式、双重模式和三重模式。
ADC 功能框图

1. 电压输入范围
ADC 输入范围为:V (REF-) ≤ V (IN) ≤ V (REF+) ;
V (SSA) 和 V (REF-) 常接地,V (REF+) 和V (DDA) 接3.3V,即可获得0~3.3V 的输入电压范围;
2. 输入通道

外部的16 个通道在转换的时候又分为规则通道和注入通道:
规则通道:
规则通道最多有16 路。
一般平时用的都是规则通道。
注入通道:
注入通道最多有4 路。
是一种在规则通道转换的时候强行插入要转换的一种,若在规则通道转化过程中,有注入通道插队,那么就要先转换完注入通道,等待注入通道转换完成,再回到规则通道的转换流程中。
3. 转换顺序
规则序列
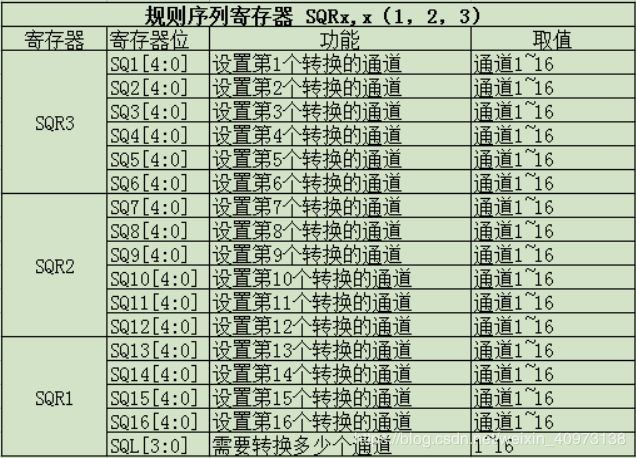
SQR3 控制着规则序列中的第一个到第六个转换,对应的位为:SQ1[4:0]~SQ6[4:0],第一次转换的是位 4:0 SQ1[4:0],如果通道 16 想第一次转换,那么在 SQ1[4:0]写 16即可。SQR2 控制着规则序列中的第 7 到第12 个转换,对应的位为:SQ7[4:0]~SQ12[4:0],如果通道 1 想第 8 个转换,则SQ8[4:0]写 1即可。SQR1 控制着规则序列中的第 13到第 16个转换,对应位为:SQ13[4:0]~SQ16[4:0],如果通道 6 想第 10 个转换,则 SQ10[4:0]写 6 即可。
具体使用多少个通道,由 SQR1的位L[3:0]决定,最多 16 个通道。
注入序列

注入序列寄存器JSQR 只有一个最多支持 4 个通道,具体多少个由 JSQR 的 JL[2:0]决定。
如果 JL的 值小于 4的话,则 JSQR跟 SQR决定转换顺序的设置不一样,第一次转换的不是JSQR1[4:0],而是 JCQRx[4:0] ,x = (4-JL),跟 SQR刚好相反。如果 JL=00(1个转换),那么转换的顺序是从 JSQR4[4:0]开始,而不是从 JSQR1[4:0]开始,这个要注意,编程的时候不要搞错。当 JL等于 4 时,跟 SQR 一样。
4. 触发源
ADC转换可以由ADC 控制寄存器 2: ADC_CR2的 ADON这个位来控制,写 1的时候开始转换,写 0 的时候停止转换。
ADC 还支持外部事件触发转换,这个触发包括内部定时器触发和外部 IO触发。触发源有很多,具体选择哪一种触发源,由 ADC控制寄存器2:ADC_CR2的 EXTSEL[2:0]和JEXTSEL[2:0]位来控制。
EXTSEL[2:0]用于选择规则通道的触发源,JEXTSEL[2:0]用于选择注入通道的触发源。选定好触发源之后,触发源是否要激活,则由 ADC 控制寄存器 2:ADC_CR2的 EXTTRIG 和JEXTTRIG 这两位来激活。
如果使能了外部触发事件,我们还可以通过设置 ADC控制寄存器 2:ADC_CR2的EXTEN[1:0]和 JEXTEN[1:0]来控制触发极性,可以有 4种状态,分别是:禁止触发检测、上升沿检测、下降沿检测以及上升沿和下降沿均检测。
5. 转换时间
ADC 时钟:
ADC 输入时钟 ADC_CLK 由 PCLK2 经过分频产生,最大值是 36MHz,典型值为30MHz,分频因子由 ADC 通用控制寄存器 ADC_CCR 的 ADCPRE[1:0]设置,可设置的分频系数有 2、4、6和 8,注意这里没有 1 分频。对于 STM32F429IGT6我们一般设置PCLK2=HCLK/2=90MHz。所以程序一般使用 4分频或者 6分频。
采样时间:
ADC 需要若干个 ADC_CLK周期完成对输入的电压进行采样,采样的周期数可通过ADC 采样时间寄存器 ADC_SMPR1和 ADC_SMPR2 中的 SMP[2:0]位设置,ADC_SMPR2控制的是通道 0~9,ADC_SMPR1控制的是通道 10~17。每个通道可以分别用不同的时间采样。其中采样周期最小是 3个,即如果我们要达到最快的采样,那么应该设置采样周期为 3个周期,这里说的周期就是 1/ADC_CLK。
ADC 的总转换时间跟 ADC的输入时钟和采样时间有关,公式为:
Tconv = 采样时间 + 12个周期
当 ADCCLK = 30MHz,即 PCLK2 为 60MHz,ADC时钟为 2分频,采样时间设置为 3个周期,那么总的转换时为:Tconv = 3 + 12 = 15 个周期 =0.5us。
一般我们设置 PCLK2=90MHz,经过 ADC 预分频器能分频到最大的时钟只能是 22.5M,采样周期设置为 3个周期,算出最短的转换时间为 0.6667us,这个才是最常用的。
6. 数据寄存器
ADC 转换后的数据根据转换组的不同,规则组的数据放在ADC_DR寄存器,注入组的数据放在 JDRx。如果是使用双重或者三重模式那规矩组的数据是存放在通用数据寄存器 ADC_CDR 内。
规则数据寄存器ADC_DR:
ADC 规则组数据寄存器 ADC_DR只有一个,是一个 32 位的寄存器,只有低 16 位有效并且只是用于独立模式存放转换完成数据。因为 ADC 的最大精度是 12 位,ADC_DR 是16 位有效,这样允许 ADC存放数据时候选择左对齐或者右对齐,具体是以哪一种方式存放,由 ADC_CR2的 11 位 ALIGN 设置。假如设置 ADC 精度为 12位,如果设置数据为左对齐,那 AD转换完成数据存放在 ADC_DR寄存器的[4:15]位内;如果为右对齐,则存放在 ADC_DR寄存器的[0:11]位内。
规则通道可以有 16 个这么多,可规则数据寄存器只有一个,如果使用多通道转换,那转换的数据就全部都挤在了 DR里面,前一个时间点转换的通道数据,就会被下一个时间点的另外一个通道转换的数据覆盖掉,所以当通道转换完成后就应该把数据取走,或者开启 DMA 模式,把数据传输到内存里面,不然就会造成数据的覆盖。最常用的做法就是开启 DMA 传输。
如果没有使用 DMA 传输,我们一般都需要使用 ADC状态寄存器 ADC_SR 获取当前ADC 转换的进度状态,进而进行程序控制。
注入数据寄存器ADC_JDRx:
ADC 注入组最多有 4个通道,刚好注入数据寄存器也有 4 个,每个通道对应着自己的寄存器,不会跟规则寄存器那样产生数据覆盖的问题。ADC_JDRx 是 32位的,低 16位有效,高 16 位保留,数据同样分为左对齐和右对齐,具体是以哪一种方式存放,由ADC_CR2的 11位 ALIGN 设置。
通用规则数据寄存器ADC_CDR:
规则数据寄存器 ADC_DR 是仅适用于独立模式的,而通用规则数据寄存器 ADC_CDR是适用于双重和三重模式的。独立模式就是仅仅适用三个 ADC的其中一个,双重模式就是同时使用 ADC1 和 ADC2,而三重模式就是三个 ADC 同时使用。在双重或者三重模式下一般需要配合 DMA数据传输使用。
7. 中断
转换结束中断:
数据转换结束后,可以产生中断,中断分为四种:
- 规则通道转换结束中断;
- 注入转换通道转换结束中断;
- 模拟看门狗中断;(当被ADC 转换的模拟电压低于底阀或高于高阀,产生中断)
- 溢出中断。(发生DMA 传输数据丢失,产生中断)
DMA 请求:
规则和注入通道转换结束后,除了产生中断外,还可产生DMA 请求,将转换好的数据直接存储在内存里面。
对于独立模式的多通道 AD 转换使用 DMA 传输非常有必须要,程序编程简化了很多。对于双重或三重模式使用 DMA传输几乎可以说是必要的。
8. 电压转换
我们一般在设计原理图的时候会把 ADC 的输入电压范围设定在:0~3.3v,如果设置ADC 为 12 位的,那么 12 位满量程对应的就是 3.3V,12 位满量程对应的数字值是:2^12。数值 0 对应的就是 0V。如果转换后的数值为 X ,X对应的模拟电压为 Y,那么会有这么一个等式成立:
(212 / 3.3 = X / Y → Y = (3.3 * X ) / 212
在ADC 初始化函数当中,除了要配置ADC_InitTypeDef 结构体外,还要配置ADC_CommonInitTypeDef 结构体,后者是用来配置三个ADC 公用的工作环境,例如模式选择、ADC 时钟等等。
独立模式单通道采集实验(中断)
使用板载电位器触电输出引脚电压的采集并通过串口打印至屏幕。
单通道采集适用AD 转换完成中断,在中断服务函数中读取数据,不使用DMA 传输,多通道才需使用DMA 传输。

编程要点:
- 初始化配置ADC 目标引脚为模拟输入模式;
- 使能ADC 时钟;
- 配置通用ADC 为独立模式,采样4 分频;
- 设置目标ADC 为12位分辨率,1 通道的连续转换,不需要外部触发;
- 设置ADC 转换通道顺序及采样时间;
- 配置使能ADC 转换完成中断,在中断内读取转换完数据;
- 启动ADC 转换;
- 使能软件触发ADC 转换。
(转换结果在中断中读出,不使用DMA 数据传输)
bsp_adc.h
/**
******************************************************************************
* @file bsp_adc.h
* @author Waao
* @version V1.0.0
* @date 12-Jan-2019
* @brief This file contains some board support package's definition for the ADC1.
*
******************************************************************************
* @attention
*
* None
*
******************************************************************************
*/
#ifndef __BSP_ADC_H_
#define __BSP_ADC_H_
#include bsp_adc.c
/**
******************************************************************************
* @file bsp_adc.c
* @author Waao
* @version V1.0.0
* @date 12-Jan-2019
* @brief This file contains some board support package's definition for the ADC1.
*
******************************************************************************
* @attention
*
* None
*
******************************************************************************
*/
#include stm32f4xx_it.c(添加)
extern __IO uint16_t Values_primitive;
/**
* @brief Send the volt value to the screen when trigger a interrupt.
* @param None
* @retval None
*/
void ADC_IRQHandler(void)
{
//if(ADC_GetITStatus(ADC1,ADC_IT_EOC)==SET)
if(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == SET)
{
Values_primitive = (uint16_t) ADC1->DR;
}
ADC_ClearITPendingBit(ADC1,ADC_IT_EOC);
}
main.h
#include main.c
#include 独立模式单通道采集实验(DMA)
adc.h
/**
******************************************************************************
* @file adc.h
* @author Waao
* @version V1.0.0
* @date 29-Jan-2019
* @brief This file contains some board support package's definition for the ADC.
*
******************************************************************************
* @attention
*
* None
*
******************************************************************************
*/
#ifndef __ADC_H_
#define __ADC_H_
#include adc.c
/**
******************************************************************************
* @file adc.c
* @author Waao
* @version V1.0.0
* @date 29-Jan-2019
* @brief This file contains some board support package's functions for the ADC.
*
******************************************************************************
* @attention
*
* None
*
******************************************************************************
*/
#include main.c
#include