H264码流解析(三):解析SPS和PPS
上两篇里面写了划分NALU和指数哥伦布编码,这一篇主要写解析SPS和PPS。
1、下载bs.h头文件
下载bs.h头文件,并在项目中使用
下载地址
2、解析SPS
H264官方文档英文版下载
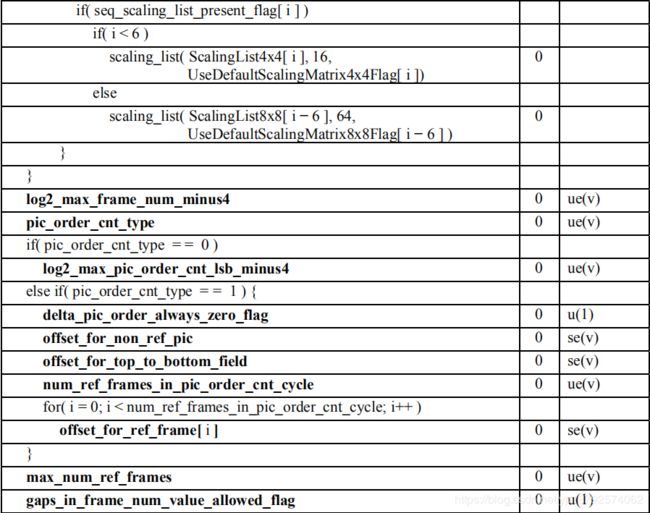
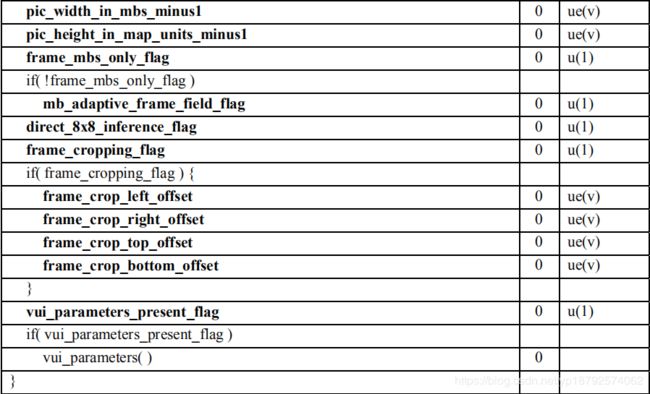
先看SPS(序列参数集)的结构,再7.3.2.1.1里面包含了SPS结构的介绍

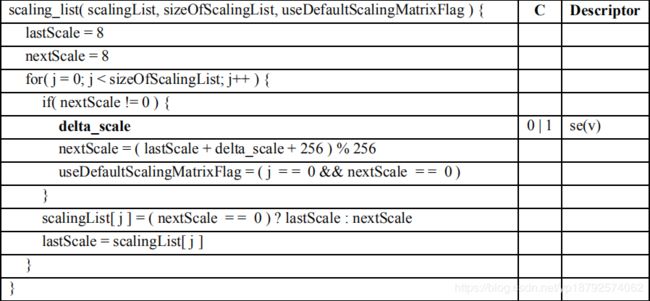
其中scaling_list函数在7.3.2.1.1.1里,如图所示
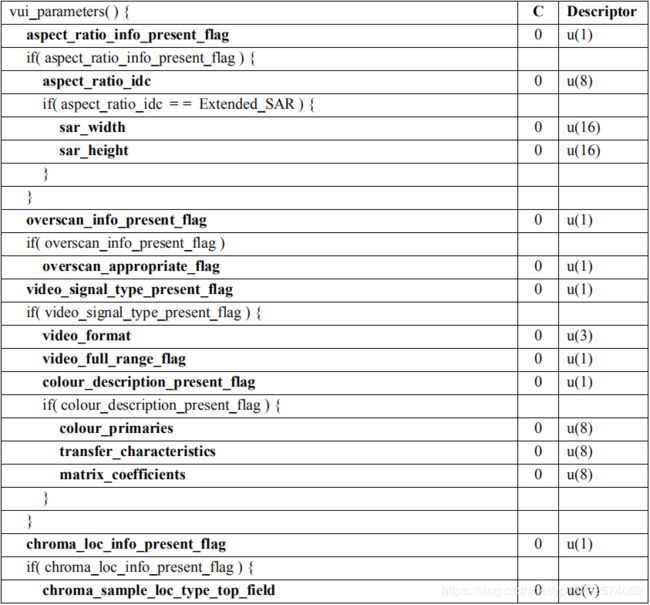
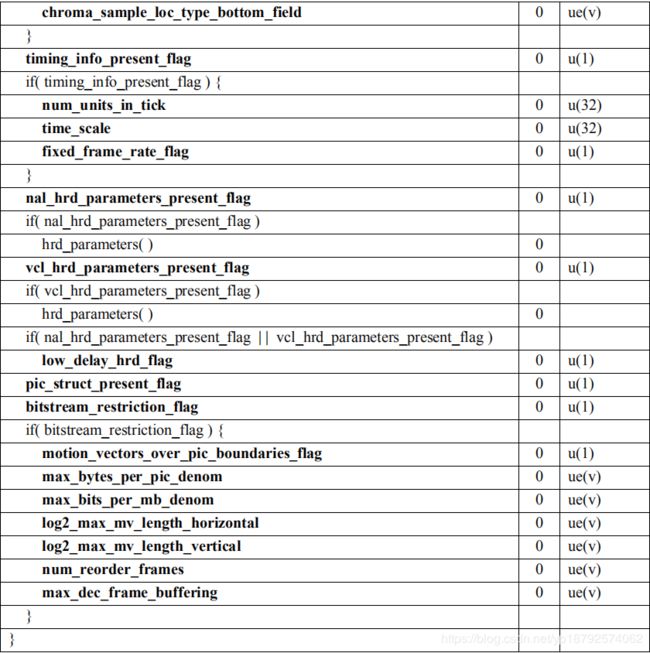
vui_parameters函数在E1.1里 ,如图所示
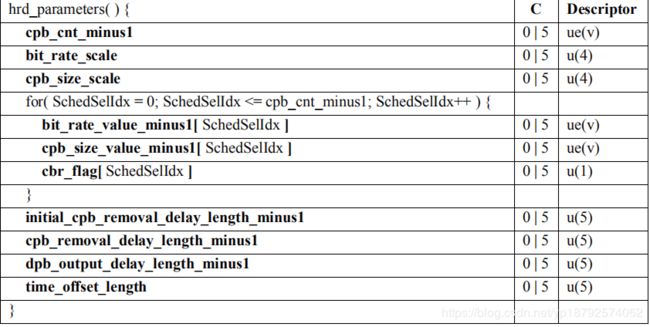
hrd_parameters()函数在E.1.2里面,如图
具体代码如下,注意点就是我们要将EBSP的数据转变为RBSP的数据才可以解析,不然系欸小会有问题
bs_t* b;
void scaling_list(uint32_t* scalingList, int sizeOfScalingList, uint32_t useDefaultScalingMatrixFlag) {
int lastScale = 8;
int nextScale = 8;
for (int j = 0; j < sizeOfScalingList; j++) {
if (nextScale != 0) {
int delta_scale = bs_read_se(b);
std::cout << "delta_scale:" << delta_scale << std::endl;
nextScale = (lastScale + delta_scale + 256) % 256;
useDefaultScalingMatrixFlag = (j == 0 && nextScale == 0);
}
scalingList[j] = (nextScale == 0) ? lastScale : nextScale;
lastScale = scalingList[j];
}
}
void hrd_parameters() {
std::cout << "==hrd==" << std::endl;
uint32_t cpb_cnt_minus1 = bs_read_ue(b);
std::cout << "cpb_cnt_minus1:" << cpb_cnt_minus1 << std::endl;
std::cout << "bit_rate_scale:" << bs_read_u(b, 4) << std::endl;
std::cout << "cpb_size_scale:" << bs_read_u(b, 4) << std::endl;
uint32_t bit_rate_value_minus1[5];
uint32_t cpb_size_value_minus1[5];
uint32_t cbr_flag[5];
for (int SchedSelIdx = 0; SchedSelIdx <= cpb_cnt_minus1; SchedSelIdx++) {
bit_rate_value_minus1[SchedSelIdx] = bs_read_ue(b);
cpb_size_value_minus1[SchedSelIdx] = bs_read_ue(b);
cbr_flag[SchedSelIdx] = bs_read_u1(b);
}
std::cout << "initial_cpb_removal_delay_length_minus1:" << bs_read_u(b, 5) << std::endl;
std::cout << "cpb_removal_delay_length_minus1:" << bs_read_u(b, 5) << std::endl;
std::cout << "dpb_output_delay_length_minus1:" << bs_read_u(b, 5) << std::endl;
std::cout << "time_offset_length:" << bs_read_u(b, 5) << std::endl;
std::cout << "==hrd end==" << std::endl;
}
void vui_parameters() {
std::cout << "==VUI==" << std::endl;
uint32_t aspect_ratio_info_present_flag = bs_read_u1(b);
std::cout << "aspect_ratio_info_present_flag:" << aspect_ratio_info_present_flag << std::endl;
if (aspect_ratio_info_present_flag) {
uint32_t aspect_ratio_idc = bs_read_u8(b);
std::cout << " aspect_ratio_idc:" << aspect_ratio_idc << std::endl;
if (aspect_ratio_idc == Extended_SAR){
std::cout << " sar_width:" << bs_read_u(b,16);
std::cout << " sar_height:" << bs_read_u(b, 16);
}
}
uint32_t overscan_info_present_flag = bs_read_u1(b);
std::cout << "overscan_info_present_flag:" << overscan_info_present_flag << std::endl;
if (overscan_info_present_flag) {
std::cout << " overscan_appropriate_flag:" << bs_read_u1(b) << std::endl;
}
uint32_t video_signal_type_present_flag = bs_read_u1(b);
std::cout << "video_signal_type_present_flag:" << video_signal_type_present_flag << std::endl;
if (video_signal_type_present_flag) {
std::cout << " video_format:" << bs_read_u(b,3) << std::endl;
std::cout << " video_full_range_flag:" << bs_read_u1(b) << std::endl;
uint32_t colour_description_present_flag = bs_read_u1(b);
std::cout << " colour_description_present_flag:" << colour_description_present_flag << std::endl;
if (colour_description_present_flag) {
std::cout << " colour_primaries:" << bs_read_u8(b) << std::endl;
std::cout << " transfer_characteristics:" << bs_read_u8(b) << std::endl;
std::cout << " matrix_coefficients:" << bs_read_u8(b) << std::endl;
}
}
uint32_t chroma_loc_info_present_flag = bs_read_u1(b);
std::cout << "chroma_loc_info_present_flag:" << chroma_loc_info_present_flag << std::endl;
if (chroma_loc_info_present_flag) {
std::cout << " chroma_sample_loc_type_top_field:" << bs_read_ue(b) << std::endl;
std::cout << " chroma_sample_loc_type_bottom_field:" << bs_read_ue(b) << std::endl;
}
uint32_t timing_info_present_flag = bs_read_u1(b);
std::cout << "timing_info_present_flag:" << timing_info_present_flag << std::endl;
if (timing_info_present_flag) {
std::cout << " num_units_in_tick:" << bs_read_u(b, 32) << std::endl;
std::cout << " time_scale:" << bs_read_u(b, 32) << std::endl;
std::cout << " fixed_frame_rate_flag:" << bs_read_u1(b) << std::endl;
}
uint32_t nal_hrd_parameters_present_flag = bs_read_u1(b);
std::cout << "nal_hrd_parameters_present_flag:" << nal_hrd_parameters_present_flag << std::endl;
if (nal_hrd_parameters_present_flag) {
hrd_parameters();
}
uint32_t vcl_hrd_parameters_present_flag = bs_read_u1(b);
std::cout << "vcl_hrd_parameters_present_flag:" << vcl_hrd_parameters_present_flag << std::endl;
if (vcl_hrd_parameters_present_flag) {
hrd_parameters();
}
if (nal_hrd_parameters_present_flag || vcl_hrd_parameters_present_flag) {
std::cout << " low_delay_hrd_flag:" << bs_read_u1(b) << std::endl;
}
std::cout << "pic_struct_present_flag:" << bs_read_u1(b) << std::endl;
uint32_t bitstream_restriction_flag = bs_read_u1(b);
std::cout << "bitstream_restriction_flag:" << bitstream_restriction_flag << std::endl;
if (bitstream_restriction_flag) {
std::cout << " motion_vectors_over_pic_boundaries_flag:" << bs_read_u1(b) << std::endl;
std::cout << " max_bytes_per_pic_denom:" << bs_read_ue(b) << std::endl;
std::cout << " max_bits_per_mb_denom:" << bs_read_ue(b) << std::endl;
std::cout << " log2_max_mv_length_horizontal:" << bs_read_ue(b) << std::endl;
std::cout << " log2_max_mv_length_vertical:" << bs_read_ue(b) << std::endl;
std::cout << " num_reorder_frames:" << bs_read_ue(b) << std::endl;
std::cout << " max_dec_frame_buffering:" << bs_read_ue(b) << std::endl;
}
std::cout << "==VUI== End" << std::endl;
}
std::vector EBSP2RBSP(uint8_t* buffer, int len) {
// 00 00 03 去掉03
std::vector ebsp;
int i = 0;
for (i = 0; i < len-2; ++i) {
if (buffer[i] == 0x00 && buffer[i+1] == 0x00 && buffer[i+2] == 0x03) {
ebsp.push_back(buffer[i++]);
ebsp.push_back(buffer[i++]);
}
else {
ebsp.push_back(buffer[i]);
}
}
for (; i < len; ++i) {
ebsp.push_back(buffer[i]);
}
return ebsp;
}
uint32_t chroma_format_idc; // pps要使用
void ParseSPS(uint8_t* buffer, int len) {
std::vector ebsp = EBSP2RBSP(buffer, len);
b = bs_new(ebsp.data(), ebsp.size());
std::cout << "forbidden_zero_bit :" << bs_read_u(b, 1) << std::endl;
std::cout << "nal_ref_idc:" << bs_read_u(b, 2) << std::endl;
std::cout << "nal_unit_type:" << bs_read_u(b, 5) << std::endl;
uint32_t profile_idc = bs_read_u8(b);
std::cout << "profile_idc:" << profile_idc << std::endl;
std::cout << "constraint_set0_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "constraint_set1_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "constraint_set2_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "constraint_set3_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "constraint_set4_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "constraint_set5_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << "reserved_zero_2bits :" << bs_read_u(b, 2) << std::endl;
std::cout << "level_idc:" << bs_read_u8(b) << std::endl;
std::cout << "seq_parameter_set_id:" << bs_read_ue(b) << std::endl;
if (profile_idc == 100 || profile_idc == 110 || profile_idc == 122 ||
profile_idc == 244 || profile_idc == 44 || profile_idc == 83 ||
profile_idc == 86 || profile_idc == 118 || profile_idc == 128) {
chroma_format_idc = bs_read_ue(b);
std::cout << " chroma_format_idc:" << chroma_format_idc << std::endl;
if (chroma_format_idc == 3) {
std::cout << " separate_colour_plane_flag:" << bs_read_u(b, 1) << std::endl;
}
std::cout << " bit_depth_luma_minus8:" << bs_read_ue(b) << std::endl;
std::cout << " bit_depth_chroma_minus8:" << bs_read_ue(b) << std::endl;
std::cout << " qpprime_y_zero_transform_bypass_flag:" << bs_read_u(b, 1) << std::endl;
uint32_t seq_scaling_matrix_present_flag = bs_read_u(b, 1);
std::cout << " seq_scaling_matrix_present_flag:" << seq_scaling_matrix_present_flag << std::endl;
if (seq_scaling_matrix_present_flag) {
uint32_t seq_scaling_list_present_flag[12];
uint32_t* ScalingList4x4[12];
uint32_t UseDefaultScalingMatrix4x4Flag[12];
uint32_t* ScalingList8x8[12];
uint32_t UseDefaultScalingMatrix8x8Flag[12];
for (int i = 0; i < ((chroma_format_idc != 3) ? 8 : 12); i++) {
seq_scaling_list_present_flag[i] = bs_read_u(b, 1);
if (seq_scaling_list_present_flag[i]) {
if (i < 6) {
scaling_list(ScalingList4x4[i], 16,
UseDefaultScalingMatrix4x4Flag[i]);
}
else {
scaling_list(ScalingList8x8[i-6], 64,
UseDefaultScalingMatrix8x8Flag[i-6]);
}
}
}
}
}
std::cout << "log2_max_frame_num_minus4:" << bs_read_ue(b) << std::endl;
uint32_t pic_order_cnt_type = bs_read_ue(b);
std::cout << "pic_order_cnt_type:" << pic_order_cnt_type << std::endl;
if (pic_order_cnt_type == 0) {
std::cout << " log2_max_pic_order_cnt_lsb_minus4:" << bs_read_ue(b) << std::endl;
}
else if (pic_order_cnt_type == 1) {
std::cout << " delta_pic_order_always_zero_flag:" << bs_read_u(b, 1) << std::endl;
std::cout << " offset_for_non_ref_pic:" << bs_read_se(b) << std::endl;
std::cout << " offset_for_top_to_bottom_field:" << bs_read_se(b) << std::endl;
uint32_t num_ref_frames_in_pic_order_cnt_cycle = bs_read_ue(b);
std::cout << " num_ref_frames_in_pic_order_cnt_cycle:" << num_ref_frames_in_pic_order_cnt_cycle << std::endl;
int offset_for_ref_frame[256];
for (int i = 0; i < num_ref_frames_in_pic_order_cnt_cycle; i++) {
offset_for_ref_frame[i] = bs_read_se(b);
}
}
std::cout << "max_num_ref_frames:" << bs_read_ue(b) << std::endl;
std::cout << "gaps_in_frame_num_value_allowed_flag:" << bs_read_u(b,1) << std::endl;
std::cout << "pic_width_in_mbs_minus1:" << bs_read_ue(b) << std::endl;
std::cout << "pic_height_in_map_units_minus1:" << bs_read_ue(b) << std::endl;
uint32_t frame_mbs_only_flag = bs_read_u(b, 1);
std::cout << "frame_mbs_only_flag:" << frame_mbs_only_flag << std::endl;
if (!frame_mbs_only_flag) {
std::cout << " mb_adaptive_frame_field_flag:" << bs_read_u(b, 1) << std::endl;
}
std::cout << "direct_8x8_inference_flag:" << bs_read_u(b, 1) << std::endl;
uint32_t frame_cropping_flag = bs_read_u(b, 1);
std::cout << "frame_cropping_flag:" << frame_cropping_flag << std::endl;
if (frame_cropping_flag) {
std::cout << " frame_crop_left_offset:" << bs_read_ue(b) << std::endl;
std::cout << " frame_crop_right_offset:" << bs_read_ue(b) << std::endl;
std::cout << " frame_crop_top_offset:" << bs_read_ue(b) << std::endl;
std::cout << " frame_crop_bottom_offset:" << bs_read_ue(b) << std::endl;
}
uint32_t vui_parameters_present_flag = bs_read_u(b, 1);
std::cout << "vui_parameters_present_flag:" << vui_parameters_present_flag << std::endl;
if (vui_parameters_present_flag) {
vui_parameters();
}
bs_free(b);
} 通过解析我们可以发现SPS序列参数集里面包含以下内容:
(1)、profile_idc,指明所需要的profile
(2)、level_idc,指明所需要的level
(3)、sps的id,后面pps根据sps的id找到对应的sps
(4)、max_num_ref_frames用于参考帧的最大数目
(5)、图像的宽pic_width_in_mbs_minus1和高pic_height_in_map_units_minus1,计算方法width = (pic_width_in_mbs_minus1+1)*16 。height = (pic_height_in_map_units_minus1+1)*16
(6)、video_full_range_flag ,表示video range还是full fange
(7)、帧速率,每一帧之间的间隔
(8)、 frame_mbs_only_flag,宏块编码方式,为1表示所有宏块都是用帧编码,为0表示可能使用帧编码也可能使用场编码
(9)、log2_max_pic_order_cnt_lsb_minus4,表示POC的上限
(10)、pic_order_cnt_type,指明poc的编码方式,poc标识图像的播放顺序
等等
具体可以参考下面两篇文章
https://blog.csdn.net/Guofengpu/article/details/51072079
https://blog.csdn.net/heanyu/article/details/6191576
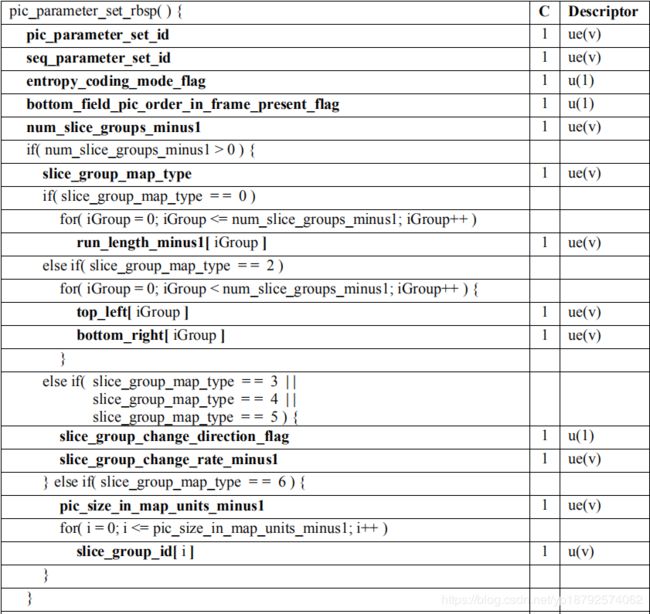
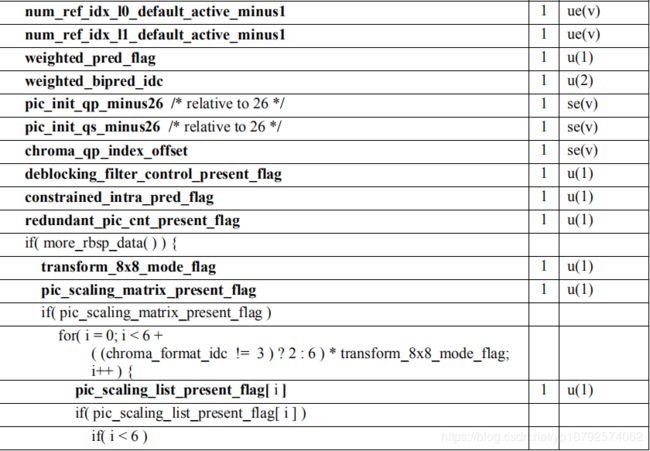
3、解析PPS
PPS:图像参数集,具体内容如下
具体代码如下所示
// 一个bit 1,若干个bit 0
void rbsp_trailing_bits() {
int rbsp_stop_one_bit = bs_read_u1(b); // equal to 1
std::cout << "rbsp_stop_one_bit:" << rbsp_stop_one_bit << std::endl;
while (!bs_byte_aligned(b)){
int rbsp_alignment_zero_bit = bs_read_u1(b); // equal to 0
}
}
// 是不是有更多的RBSP数据
uint32_t more_rbsp_data() {
if (bs_eof(b)) { return 0; }
if (bs_peek_u1(b) == 1) { return 0; } // if next bit is 1, we've reached the stop bit
return 1;
}
void ParsePPS(uint8_t* buffer, int len) {
std::cout << "=========================PPS=======================" << std::endl;
std::vector ebsp = EBSP2RBSP(buffer, len);
// std::cout << "pps buffer len:" << ebsp.size() << std::endl;
b = bs_new(ebsp.data(), ebsp.size());
std::cout << "forbidden_zero_bit :" << bs_read_u(b, 1) << std::endl;
std::cout << "nal_ref_idc:" << bs_read_u(b, 2) << std::endl;
std::cout << "nal_unit_type:" << bs_read_u(b, 5) << std::endl;
std::cout << "pic_parameter_set_id:" << bs_read_ue(b) << std::endl;
std::cout << "seq_parameter_set_id:" << bs_read_ue(b) << std::endl;
std::cout << "entropy_coding_mode_flag:" << bs_read_u1(b) << std::endl;
std::cout << "bottom_field_pic_order_in_frame_present_flag:" << bs_read_u1(b) << std::endl;
uint32_t num_slice_groups_minus1 = bs_read_ue(b);
std::cout << "num_slice_groups_minus1:" << num_slice_groups_minus1 << std::endl;
if (num_slice_groups_minus1 > 0) {
uint32_t slice_group_map_type = bs_read_ue(b);
std::cout << " slice_group_map_type:" << slice_group_map_type << std::endl;
if (slice_group_map_type == 0) {
uint32_t run_length_minus1[8];
for (int iGroup = 0; iGroup <= num_slice_groups_minus1; iGroup++) {
run_length_minus1[iGroup] = bs_read_ue(b);
}
}
else if (slice_group_map_type == 2) {
uint32_t top_left[8];
uint32_t bottom_right[8];
for (int iGroup = 0; iGroup < num_slice_groups_minus1; iGroup++) {
top_left[iGroup] = bs_read_ue(b);
bottom_right[iGroup] = bs_read_ue(b);
}
}
else if (slice_group_map_type == 3 ||
slice_group_map_type == 4 ||
slice_group_map_type == 5) {
std::cout << " slice_group_change_direction_flag:" << bs_read_u1(b) << std::endl;
std::cout << " slice_group_change_rate_minus1:" << bs_read_ue(b) << std::endl;
}
else if (slice_group_map_type == 6) {
uint32_t pic_size_in_map_units_minus1 = bs_read_ue(b);
std::cout << " pic_size_in_map_units_minus1:" << pic_size_in_map_units_minus1 << std::endl;
uint32_t slice_group_id[8];
for (int i = 0; i <= pic_size_in_map_units_minus1; i++) {
slice_group_id[i] = bs_read_ue(b);
}
}
}
std::cout << "num_ref_idx_l0_default_active_minus1:" << bs_read_ue(b) << std::endl;
std::cout << "num_ref_idx_l1_default_active_minus1:" << bs_read_ue(b) << std::endl;
std::cout << "weighted_pred_flag:" << bs_read_u1(b) << std::endl;
std::cout << "weighted_bipred_idc:" << bs_read_u(b,2) << std::endl;
std::cout << "pic_init_qp_minus26:" << bs_read_se(b) << std::endl;
std::cout << "pic_init_qs_minus26:" << bs_read_se(b) << std::endl;
std::cout << "chroma_qp_index_offset:" << bs_read_se(b) << std::endl;
std::cout << "deblocking_filter_control_present_flag:" << bs_read_u1(b) << std::endl;
std::cout << "constrained_intra_pred_flag:" << bs_read_u1(b) << std::endl;
std::cout << "redundant_pic_cnt_present_flag:" << bs_read_u1(b) << std::endl;
if (more_rbsp_data()) {
uint32_t transform_8x8_mode_flag = bs_read_u1(b);
std::cout << " transform_8x8_mode_flag:" << transform_8x8_mode_flag << std::endl;
uint32_t pic_scaling_matrix_present_flag = bs_read_u1(b);
std::cout << " pic_scaling_matrix_present_flag:" << std::endl;
uint32_t pic_scaling_list_present_flag[6];
uint32_t* ScalingList4x4[12];
uint32_t UseDefaultScalingMatrix4x4Flag[12];
uint32_t* ScalingList8x8[12];
uint32_t UseDefaultScalingMatrix8x8Flag[12];
if (pic_scaling_matrix_present_flag) {
for (int i = 0; i < 6 + ((chroma_format_idc != 3) ? 2 : 6) * transform_8x8_mode_flag; i++) {
pic_scaling_list_present_flag[i] = bs_read_u1(b);
if (pic_scaling_list_present_flag[i]) {
if (i < 6) {
scaling_list(ScalingList4x4[i], 16,
UseDefaultScalingMatrix4x4Flag[i]);
}
else {
scaling_list(ScalingList8x8[i - 6], 64,
UseDefaultScalingMatrix8x8Flag[i - 6]);
}
}
}
}
std::cout << " second_chroma_qp_index_offset:" << bs_read_se(b) << std::endl;
}
rbsp_trailing_bits();
bs_free(b);
} PPS里面主要包含以下内容
(1)、PPS的id
(2)、SPS的id
(3)、entropy_coding_mode_flag 熵编码的选择,为0表示使用CAVLC,为表示CABAC
(4)、num_slice_groups_minus1,加1表示图像中使用片组的个数
等等
当然,我们也可以不适用bs.h头文件,也可以自己写解析过程,主要就是bs_read_u1,bs_read_u,bs_read_u8,bs_read_ue,bs_read_se这几个函数