对抗生成网络学习(十二)——MARTA-GAN实现遥感图像的场景生成(tensorflow实现)
一、背景
MARTA-GAN全称为multiple-layer feature-matching generative adversarial networks,是Daoyu Lin等人于16年12月发表的文章。我比较好奇的是,这个GAN为啥要叫MARTA-GAN,而不是MLFM-GAN...........由于我自身是做遥感出身的,所以还挺关注GAN在遥感方面的应用,这篇文章算是我看到的GAN最早应用在遥感领域的文章了,所以就打算来实现一下。作者这篇文章的题目为《MARTA GANs: Unsupervised Representation Learning for Remote Sensing Image Classification》,不过我感觉与其说是图像分类,不如说是场景实现更准确一些。
MARTA-GAN是基于DCGAN做的,我实验的结果非常不理想,所以这篇文章重点就放在对MARTA-GAN的解读了。不过实验过程还是要写的,可以为后面做这个模型的人提供参考。
[1]文章链接:https://arxiv.org/pdf/1612.08879.pdf
二、MARTA-GAN解读
搜了一下,网上几乎没有对这篇论文详细解读的文章,那我就根据自己的理解来写写。
先从摘要部分看MARTA-GAN的目的,作者提到现有模型的最大限制是非常有限的标记样本,因此作者提出了一个非监督模型MARTA-GAN,利用无标记样本来实现不同场景。
遥感图像与普通的数字图像还是有区别的,遥感图像具有非常强的空间性,不同地物会表现出不同的大小、颜色。早先用于场景分类的方法包括BoVW(bag of visual words)、SPM(spatial pyramid matching)、CNN等,但这些方法都是基于手工选取的特征或需要大量标记样本。而GAN是一种非监督的方法,因此作者基于DCGAN做了改进,提出MARTA-GAN,作者的改进之处主要表现在:
(1)在生成器中,DCGAN生成64*64的图,但是MARTA-GAN生成256*256的图
(2)核的大小不同,DCGAN为5*5,MARTA-GAN为4*4
(3)MARTA-GAN使用多特征层(multi-feature layer)来整合中级、高级信息(mid- and high-level)
(4)引入两种loss函数:感知loss(perceptual loss)和特征匹配loss(feature matching loss)
作者的主要贡献在于:
1)To our knowledge, this is the first time that GANs have been applied to classify unsupervised remote sensing images. (首次将GAN用于遥感图像)
2)The results of experiments on the UC-Merced Landuse and Brazilian Coffee Scenes datasets showed that the proposed algorithm outperforms state-of-the-art unsupervised algorithms in terms of overall classification accuracy. (效果很好)
3)We propose a multi-feature layer by combining perceptual loss and loss of feature matching to learn better image representations.(结合了感知loss和特征匹配loss的多特征层)
先来看一下作者提出MARTA-GAN的流程图:
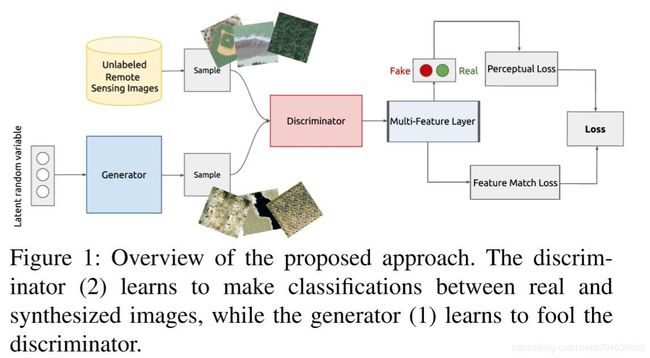
流程图还是非常小清新的。模型的驱动函数这里不再过多介绍。关于网络结构,示意图为:

除过上图中标记的网络参数,作者还提到,激活函数使用了leakyReLU,leak值设为0.2,kernel sizes为4*4,步长为2,在判别器和生成器中使用了BN(batch normalization)层,衰减因子设置为0.9。正式进行实验之前,还需要对数据做预处理,将图像的值归一化至[-1 1],batch size设置为64,使用SGD(随机梯度下降),优化器为Adam,学习率为0.00002,动量为0.5。作者的实现过程是用的tensorlayer。
作者将MARTA-GAN用于两个不同的数据集: the UC Merced Land Use Dataset和the Brazilian Coffee Scenes Dataset,并都取得了不错的表现。我们的实验使用的是the UC Merced Land Use Dataset数据集,后面会详细介绍;关于the Brazilian Coffee Scenes Dataset数据集,一共有2876张影像,均来自SPOT卫星,图像尺寸为64*64,包含1438张Coffee影像和1438张non-Coffee影像。
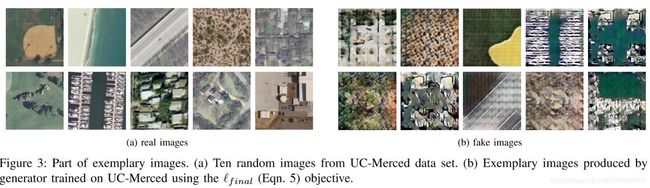
先来看看在the UC Merced Land Use Dataset数据集上的表现:
再来看看MARTA-GAN在the Brazilian Coffee Scenes Dataset数据集上的表现
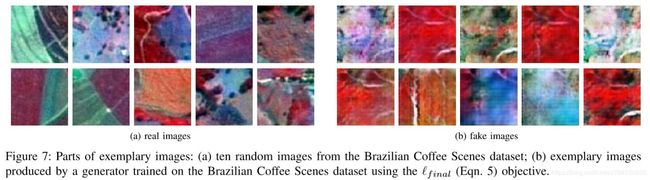
虽然the Brazilian Coffee Scenes Dataset的结果比较抽象,不过原始数据集似乎效果也不是很好,所以作者还针对the UC Merced Land Use Dataset数据集的结果做了精度评定,并与DCGAN做了对比:

该数据集一共是21个类别,MARTA-GAN的平均精度约比DCGAN高7%,作者提到这是因为MARTA-GAN中引入了中级和高级特征信息。
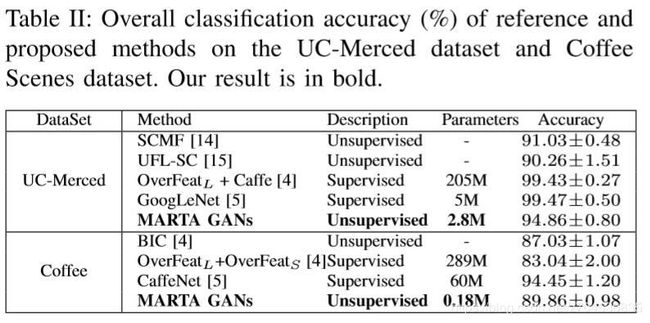
最后作者还比对了不同方法用于这两个数据集的效果,可以直观的看到MARTA-GAN的参数量最少且效果较好;
三、MARTA-GAN实现过程
关于MARTA-GAN的实现过程,我主要参考了两个代码:
[2]https://github.com/BUPTLdy/MARTA-GAN
[3]https://github.com/ualiawan/MARTA-GANs
由于[2]是用tensorlayer写的,我的tensorlayer有点问题,而[3]是用tensorflow写的,但是有点小bug并少了一些功能,所以我主要使用[3]的代码,并做了一些改进。
1. 所有文件结构
所有文件结构为:
-- utilities.py
-- network.py
-- train_net.py
-- features.py
-- train_svm.py
-- data # 数据集需要自己准备
|------ uc_test_256
|------ image01.jpg
|------ image02.jpg
|------ ......
|------ uc_train_256_data
|------ image01.jpg
|------ image02.jpg
|------ ......
|------ uc_train_256_feat
|------ image01.jpg
|------ image02.jpg
|------ ......2. 数据准备
我们所使用的数据集为the UC Merced Land Use Dataset,论文中作者也对该数据集进行了介绍,下面引入论文中的介绍:
这个数据集有21种土地利用类型(21 land-use class),每种100张,尺寸为256*256。由于数据集比较少,我们使用数据增广的方式增加数据,这里使用了水平裁剪和垂直裁剪,90°旋转的方法,在GTX 1080的配置下用了4个小时。
那么,在哪里才能下载到这个数据集呢?作者给出了这个数据集的百度云下载地址:https://pan.baidu.com/s/1i5zQNdj
所以,我们可以直接下载好数据集,然后解压,放在'data/'路径下,一定要按照上面提到的文件结构放置才行。弄好了之后,我们可以大致来看看这个数据集:

可以看到很清晰的飞机还有棒球场,当然还有其他类别的:
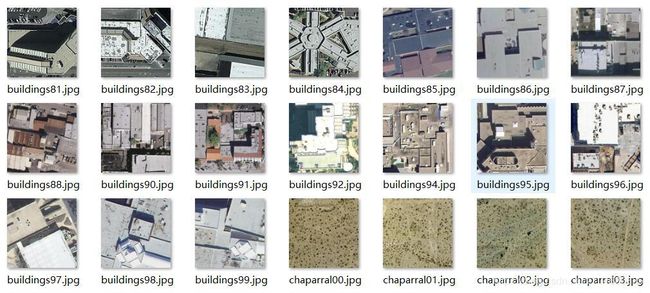
建筑物和丛林也都非常清晰,数据集的质量还是不错的。
3. 辅助函数文件utilities.py文件
这个文件中主要放置了保存图像等相关操作,下面直接给出代码:
import scipy.misc
import numpy as np
def center_crop(x, crop_h, crop_w=None, resize_w=64):
if crop_w is None:
crop_w = crop_h
h, w = x.shape[:2]
j = int(round((h - crop_h)/2.))
i = int(round((w - crop_w)/2.))
return scipy.misc.imresize(x[j:j+crop_h, i:i+crop_w],
[resize_w, resize_w])
def load_image(image_path, image_size, is_crop=True, resize_w=64):
image = scipy.misc.imread(image_path).astype(np.float)
if is_crop:
cropped_image = center_crop(image, image_size, resize_w=resize_w)
else:
cropped_image = image
return np.array(cropped_image)/127.5 - 1.
def get_labels(num_labels, lables_file):
style_labels = list(np.loadtxt(lables_file, str, delimiter='\n'))
if num_labels > 0:
style_labels = style_labels[:num_labels]
return style_labels
# 用于得到batch张图像,关键函数get_image
def imread(path, is_grayscale = False):
if is_grayscale:
return scipy.misc.imread(path, flatten = True).astype(np.float)
else:
return scipy.misc.imread(path).astype(np.float)
def transform(image, npx=64, is_crop=True, resize_w=64):
if is_crop:
cropped_image = center_crop(image, npx, resize_w=resize_w)
else:
cropped_image = image
return np.array(cropped_image)/127.5 - 1.
def get_image(image_path, image_size, is_crop=True, resize_w=64, is_grayscale=False):
return transform(imread(image_path, is_grayscale), image_size, is_crop, resize_w)
# 用于保存图像,关键函数save_images
def merge(images, size):
h, w = images.shape[1], images.shape[2]
img = np.zeros((h * size[0], w * size[1], 3))
for idx, image in enumerate(images):
i = idx % size[1]
j = idx // size[1]
img[j*h:j*h+h, i*w:i*w+w, :] = image
return img
def inverse_transform(images):
return (images+1.)/2. * 255
def imsave(images, size, path):
return scipy.misc.imsave(path, merge(images, size))
def save_images(images, size, image_path):
return imsave(inverse_transform(images), size, image_path)4. 网络结构network.py文件
这个文件定义了生成器和判别器,下面直接给出代码:
import tensorflow as tf
def generator(inputs, is_train=True, reuse=False):
output_size = 256
kernel = 4
batch_size = 64
gf_dim = 16
c_dim = 3
weight_init = tf.random_normal_initializer(stddev=0.01)
s2, s4, s8, s16, s32, s64 = int(output_size/2), int(output_size/4), int(output_size/8), int(output_size/16), int(output_size/32), int(output_size/64)
with tf.variable_scope('generator', reuse=reuse):
h0 = tf.layers.dense(inputs, units=gf_dim*32*s64*s64, activation=tf.identity, kernel_initializer=weight_init)
h0 = tf.reshape(h0, [-1, s64, s64, gf_dim*32])
h0 = tf.contrib.layers.batch_norm(h0, scale=True, is_training=is_train, scope="g_bn0")
h0 = tf.nn.relu(h0)
output1_shape = [batch_size, s32, s32, gf_dim*16]
w_h1 = tf.get_variable('g_w_h1', [kernel, kernel, output1_shape[-1], int(h0.get_shape()[-1])],
initializer=weight_init)
b_h1 = tf.get_variable('g_b_h1', [output1_shape[-1]], initializer=tf.constant_initializer(0))
h1 = tf.nn.conv2d_transpose(h0, w_h1, output_shape=output1_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h1_deconv2d') + b_h1
h1 = tf.contrib.layers.batch_norm(h1, scale=True, is_training=is_train, scope="g_bn1")
h1 = tf.nn.relu(h1)
output2_shape = [batch_size, s16, s16, gf_dim*8]
w_h2 = tf.get_variable('g_w_h2', [kernel, kernel, output2_shape[-1], int(h1.get_shape()[-1])],
initializer=weight_init)
b_h2 = tf.get_variable('g_b_h2', [output2_shape[-1]], initializer=tf.constant_initializer(0))
h2 = tf.nn.conv2d_transpose(h1, w_h2, output_shape=output2_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h2_deconv2d') + b_h2
h2 = tf.contrib.layers.batch_norm(h2, scale=True, is_training=is_train, scope="g_bn2")
h2 = tf.nn.relu(h2)
output3_shape = [batch_size, s8, s8, gf_dim*4]
w_h3 = tf.get_variable('g_w_h3', [kernel, kernel, output3_shape[-1], int(h2.get_shape()[-1])],
initializer=weight_init)
b_h3 = tf.get_variable('g_b_h3', [output3_shape[-1]], initializer=tf.constant_initializer(0))
h3 = tf.nn.conv2d_transpose(h2, w_h3, output_shape=output3_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h3_deconv2d') + b_h3
h3 = tf.contrib.layers.batch_norm(h3, scale=True, is_training=is_train, scope="g_bn3")
h3 = tf.nn.relu(h3)
output4_shape = [batch_size, s4, s4, gf_dim*2]
w_h4 = tf.get_variable('g_w_h4', [kernel, kernel, output4_shape[-1], int(h3.get_shape()[-1])],
initializer=weight_init)
b_h4 = tf.get_variable('g_b_h4', [output4_shape[-1]], initializer=tf.constant_initializer(0))
h4 = tf.nn.conv2d_transpose(h3, w_h4, output_shape=output4_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h4_deconv2d') + b_h4
h4 = tf.contrib.layers.batch_norm(h4, scale=True, is_training=is_train, scope="g_bn4")
h4 = tf.nn.relu(h4)
output5_shape = [batch_size, s2, s2, gf_dim*1]
w_h5 = tf.get_variable('g_w_h5', [kernel, kernel, output5_shape[-1], int(h4.get_shape()[-1])],
initializer=weight_init)
b_h5 = tf.get_variable('g_b_h5', [output5_shape[-1]], initializer=tf.constant_initializer(0))
h5 = tf.nn.conv2d_transpose(h4, w_h5, output_shape=output5_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h5_deconv2d') + b_h5
h5 = tf.contrib.layers.batch_norm(h5, scale=True, is_training=is_train, scope="g_bn5")
h5 = tf.nn.relu(h5)
output6_shape = [batch_size, output_size, output_size, c_dim]
w_h6 = tf.get_variable('g_w_h6', [kernel, kernel, output6_shape[-1], int(h5.get_shape()[-1])],
initializer=weight_init)
b_h6 = tf.get_variable('g_b_h6', [output6_shape[-1]], initializer=tf.constant_initializer(0))
h6 = tf.nn.conv2d_transpose(h5, w_h6, output_shape=output6_shape, strides=[1, 2, 2, 1],
padding='SAME', name='g_h6_deconv2d') + b_h6
#logits = h6.outputs
#h6.outputs = tf.nn.tanh(h6.outputs)
return tf.nn.tanh(h6)
def discriminator(inputs, is_train=True, reuse=False):
kernel = 5
df_dim = 16
weight_init = tf.random_normal_initializer(stddev=0.01)
alpha_lrelu = 0.2
with tf.variable_scope('discriminator', reuse=reuse):
w_h0 = tf.get_variable('d_w_h0', [kernel, kernel, 3, df_dim], initializer=weight_init)
b_h0 = tf.get_variable('d_b_h0', [df_dim], initializer=tf.constant_initializer(0))
h0 = tf.nn.conv2d(inputs, w_h0, strides=[1,2,2,1], padding='SAME', name='d_h0_conv2d') + b_h0
h0 = tf.nn.leaky_relu(h0, alpha_lrelu)
w_h1 = tf.get_variable('d_w_h1', [kernel, kernel, h0.get_shape()[-1], df_dim*2], initializer=weight_init)
b_h1 = tf.get_variable('d_b_h1', [df_dim*2], initializer=tf.constant_initializer(0))
h1 = tf.nn.conv2d(h0, w_h1, strides=[1,2,2,1], padding='SAME', name='d_h1_conv2d') + b_h1
h1 = tf.contrib.layers.batch_norm(h1, is_training=is_train, scope="d_bn1")
h1 = tf.nn.leaky_relu(h1, alpha_lrelu)
w_h2 = tf.get_variable('d_w_h2', [kernel, kernel, h1.get_shape()[-1], df_dim*4], initializer=weight_init)
b_h2 = tf.get_variable('d_b_h2', [df_dim*4], initializer=tf.constant_initializer(0))
h2 = tf.nn.conv2d(h1, w_h2, strides=[1,2,2,1], padding='SAME', name='d_h2_conv2d') + b_h2
h2 = tf.contrib.layers.batch_norm(h2, is_training=is_train, scope="d_bn2")
h2 = tf.nn.leaky_relu(h2, alpha_lrelu)
w_h3 = tf.get_variable('d_w_h3', [kernel, kernel, h2.get_shape()[-1], df_dim*8], initializer=weight_init)
b_h3 = tf.get_variable('d_b_h3', [df_dim*8], initializer=tf.constant_initializer(0))
h3 = tf.nn.conv2d(h2, w_h3, strides=[1,2,2,1], padding='SAME', name='d_h3_conv2d') + b_h3
h3 = tf.contrib.layers.batch_norm(h3, is_training=is_train, scope="d_bn3")
h3 = tf.nn.leaky_relu(h3, alpha_lrelu)
global_max_h3 = tf.nn.max_pool(h3, [1,4,4,1], strides=[1,4,4,1], padding='SAME', name='d_h3_maxpool')
global_max_h3 = tf.layers.flatten(global_max_h3, name='d_h3_flatten')
w_h4 = tf.get_variable('d_w_h4', [kernel, kernel, h3.get_shape()[-1], df_dim*16], initializer=weight_init)
b_h4 = tf.get_variable('d_b_h4', [df_dim*16], initializer=tf.constant_initializer(0))
h4 = tf.nn.conv2d(h3, w_h4, strides=[1,2,2,1], padding='SAME', name='d_h4_conv2d') + b_h4
h4 = tf.contrib.layers.batch_norm(h4, is_training=is_train, scope="d_bn4")
h4 = tf.nn.leaky_relu(h4, alpha_lrelu)
global_max_h4 = tf.nn.max_pool(h4, [1,2,2,1], strides=[1,2,2,1], padding='SAME', name='d_h4_maxpool')
global_max_h4 = tf.layers.flatten(global_max_h4, name='d_h4_flatten')
w_h5 = tf.get_variable('d_w_h5', [kernel, kernel, h4.get_shape()[-1], df_dim*32], initializer=weight_init)
b_h5 = tf.get_variable('d_b_h5', [df_dim*32], initializer=tf.constant_initializer(0))
h5 = tf.nn.conv2d(h4, w_h5, strides=[1,2,2,1], padding='SAME', name='d_h5_conv2d') + b_h5
h5 = tf.contrib.layers.batch_norm(h5, is_training=is_train, scope="d_bn5")
h5 = tf.nn.leaky_relu(h5, alpha_lrelu)
global_max_h5 = tf.layers.flatten(h5, name='d_h5_flatten')
features = tf.concat([global_max_h3, global_max_h4, global_max_h5], -1, name='d_concat')
h6 = tf.layers.dense(features, units=1, activation=tf.identity, kernel_initializer=weight_init, name='d_h6_dense')
#logits = h6.outputs
#h6.outputs = tf.nn.sigmoid(h6.outputs)
return tf.nn.sigmoid(h6), features5. 训练网络train_net.py文件
该文件用于编写网络结构,训练网络,直接给出代码;
import tensorflow as tf
import network
import sys
import os
import numpy as np
from glob import glob
from random import shuffle
import utilities
import time
flags = tf.app.flags
flags.DEFINE_integer("epoch", 10, "Epoch to train")
flags.DEFINE_float("learning_rate", 0.001, "Learning rate of for adam")
flags.DEFINE_float("beta1", 0.9, "Momentum term of adam")
flags.DEFINE_integer("train_size", sys.maxsize, "The size of train images")
flags.DEFINE_integer("batch_size", 64, "The number of batch images")
flags.DEFINE_integer("image_size", 256, "The size of image to use (will be center cropped)")
flags.DEFINE_integer("output_size", 256, "The size of the output images to produce")
flags.DEFINE_integer("sample_size", 64, "The number of sample images")
flags.DEFINE_integer("c_dim", 3, "Dimension of image color")
flags.DEFINE_integer("z_dim", 100, "Dimensions of input niose to generator")
flags.DEFINE_integer("sample_step", 500, "The interval of generating sample")
flags.DEFINE_string("dataset", "uc_train_256_data", "The name of dataset [celebA, mnist, lsun]")
flags.DEFINE_string("checkpoint_dir", "checkpoint", "Directory name to save the checkpoints [checkpoint]")
flags.DEFINE_string("summaries_dir", "logs", "Directory name to save the summaries")
flags.DEFINE_string("sample_dir", "samples", "Directory name to save the image samples [samples]")
flags.DEFINE_boolean("is_train", True, "True for training, False for testing [False]")
flags.DEFINE_boolean("is_crop", False, "True for training, False for testing [False]")
flags.DEFINE_boolean("visualize", False, "True for visualizing, False for nothing [False]")
FLAGS = flags.FLAGS
def main(_):
if not os.path.exists(FLAGS.checkpoint_dir):
os.makedirs(FLAGS.checkpoint_dir)
if not os.path.exists(FLAGS.sample_dir):
os.makedirs(FLAGS.sample_dir)
if not os.path.exists(FLAGS.summaries_dir):
os.makedirs(FLAGS.summaries_dir)
with tf.device("/gpu:0"):
#with tf.device("/cpu:0"):
z = tf.placeholder(tf.float32, [FLAGS.batch_size, FLAGS.z_dim], name="g_input_noise")
x = tf.placeholder(tf.float32, [FLAGS.batch_size, FLAGS.output_size, FLAGS.output_size, FLAGS.c_dim], name='d_input_images')
Gz = network.generator(z)
Dx, Dfx = network.discriminator(x)
Dz, Dfz = network.discriminator(Gz, reuse=True)
d_loss_real = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=Dx, labels=tf.ones_like(Dx)))
d_loss_fake = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=Dz, labels=tf.zeros_like(Dz)))
d_loss = d_loss_real + d_loss_fake
g_loss_perceptual = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits = Dz, labels = tf.ones_like(Dz)))
g_loss_features = tf.reduce_mean(tf.nn.l2_loss(Dfx-Dfz))/(FLAGS.image_size*FLAGS.image_size)
g_loss = g_loss_perceptual + g_loss_features
tvars = tf.trainable_variables()
d_vars = [var for var in tvars if 'd_' in var.name]
g_vars = [var for var in tvars if 'g_' in var.name]
print(d_vars)
print("---------------")
print(g_vars)
with tf.variable_scope(tf.get_variable_scope(), reuse=False):
print("reuse or not: {}".format(tf.get_variable_scope().reuse))
assert tf.get_variable_scope().reuse == False, "Houston tengo un problem"
d_trainer = tf.train.AdamOptimizer(FLAGS.learning_rate, FLAGS.beta1).minimize(d_loss, var_list=d_vars)
g_trainer = tf.train.AdamOptimizer(FLAGS.learning_rate, FLAGS.beta1).minimize(g_loss, var_list=g_vars)
tf.summary.scalar("generator_loss_percptual", g_loss_perceptual)
tf.summary.scalar("generator_loss_features", g_loss_features)
tf.summary.scalar("generator_loss_total", g_loss)
tf.summary.scalar("discriminator_loss", d_loss)
tf.summary.scalar("discriminator_loss_real", d_loss_real)
tf.summary.scalar("discriminator_loss_fake", d_loss_fake)
images_for_tensorboard = network.generator(z, reuse=True)
tf.summary.image('Generated_images', images_for_tensorboard, 2)
merged = tf.summary.merge_all()
gpu_options = tf.GPUOptions(per_process_gpu_memory_fraction=0.30)
gpu_options.allow_growth = True
saver = tf.train.Saver()
with tf.Session(config=tf.ConfigProto(gpu_options=gpu_options, allow_soft_placement=True)) as sess:
print("starting session")
summary_writer = tf.summary.FileWriter(FLAGS.summaries_dir + '/train', sess.graph)
sess.run(tf.global_variables_initializer())
data_files = glob(os.path.join("./data", FLAGS.dataset, "*.jpg"))
model_dir = "%s_%s_%s" % (FLAGS.dataset, 64, FLAGS.output_size)
save_dir = os.path.join(FLAGS.checkpoint_dir, model_dir)
sample_seed = np.random.uniform(low=-1, high=1, size=(FLAGS.batch_size, FLAGS.z_dim)).astype(np.float32)
if FLAGS.is_train:
for epoch in range(FLAGS.epoch):
d_total_cost = 0.
g_total_cost = 0.
shuffle(data_files)
num_batches = min(len(data_files), FLAGS.train_size) // FLAGS.batch_size
#num_batches = 2
for batch_i in range(num_batches):
batch_files = data_files[batch_i*FLAGS.batch_size:(batch_i+1)*FLAGS.batch_size]
batch = [utilities.load_image(batch_file, FLAGS.image_size, is_crop=FLAGS.is_crop, resize_w=FLAGS.output_size) for batch_file in batch_files]
batch_x = np.array(batch).astype(np.float32)
batch_z = np.random.normal(-1, 1, size=[FLAGS.batch_size, FLAGS.z_dim]).astype(np.float32)
start_time = time.time()
# print(batch[0])
d_err, _ = sess.run([d_loss, d_trainer], feed_dict={z: batch_z, x: batch_x})
g_err, _ = sess.run([g_loss, g_trainer], feed_dict={z: batch_z, x: batch_x})
d_total_cost += d_err
g_total_cost += g_err
if batch_i % 10 == 0:
summary = sess.run(merged, feed_dict={x: batch_x, z: batch_z})
summary_writer.add_summary(summary, (epoch-1)*(num_batches/30)+(batch_i/30))
print("Epoch: [%2d/%2d] [%4d/%4d] time: %4.4f, d_loss: %.8f, g_loss: %.8f" % (
epoch, FLAGS.epoch, batch_i, num_batches, time.time() - start_time, d_err, g_err))
# update sample files based on shuffled data
sample_files = batch_files[0:FLAGS.batch_size]
sample = [utilities.get_image(sample_file, FLAGS.image_size,
is_crop=FLAGS.is_crop,
resize_w=FLAGS.output_size,
is_grayscale=0) for sample_file in sample_files]
sample_images = np.array(sample).astype(np.float32)
if np.mod(batch_i, 10) == 0:
# generate and visualize generated images
# img, errD, errG = sess.run([net_g2.outputs, d_loss, g_loss], feed_dict={z : sample_seed, real_images: sample_images})
img = sess.run(Gz, feed_dict={z: sample_seed, x: sample_images})
utilities.save_images(img, [8, 8],
'./{}/train_{:02d}_{:03d}.png'.format(FLAGS.sample_dir, epoch, batch_i))
print("Epoch:", '%04d' % (epoch+1), "d_cost= {:.9f}".format(d_total_cost/num_batches),
"g_cost=", "{:.9f}".format(g_total_cost/num_batches))
save_path = saver.save(sess, save_dir)
print("Model saved in path: %s" % save_path)
sys.stdout.flush()
sess.close()
if __name__ == '__main__':
tf.app.run()
6. 提取特征feature.py文件
该文件用于提取训练好的网络特征,直接给出代码:
import sys
import os
import numpy as np
from glob import glob
from random import shuffle
import utilities
flags = tf.app.flags
flags.DEFINE_integer("train_size", sys.maxsize, "The size of train images")
flags.DEFINE_integer("batch_size", 64, "The number of batch images")
flags.DEFINE_integer("image_size", 256, "The size of image to use (will be center cropped)")
flags.DEFINE_integer("output_size", 256, "The size of the output images to produce [64]")
flags.DEFINE_integer("sample_size", 64, "The number of sample images [64]")
flags.DEFINE_integer("features_size", 14336, "Number of features for one image")
flags.DEFINE_integer("c_dim", 3, "Dimension of image color. [3]")
flags.DEFINE_integer("sample_step", 500, "The interval of generating sample. [500]")
flags.DEFINE_string("train_dataset", "uc_train_256_data", "The name of dataset")
flags.DEFINE_string("test_dataset", "uc_test_256", "The name of dataset")
flags.DEFINE_string("checkpoint_dir", "checkpoint", "Directory name to save the checkpoints [checkpoint]")
flags.DEFINE_string("sample_dir", "samples", "Directory name to save the image samples [samples]")
flags.DEFINE_string("feature_dir", "features", "Directory name to save features")
flags.DEFINE_boolean("is_train", False, "True for training, False for testing [False]")
flags.DEFINE_boolean("is_crop", False, "True for training, False for testing [False]")
flags.DEFINE_boolean("visualize", True, "True for visualizing, False for nothing [False]")
flags.DEFINE_integer("num_labels", 21, "Number of different labels")
flags.DEFINE_string("labels_file", "style_names.txt", "File containing a list of labels")
FLAGS = flags.FLAGS
def main(_):
if not os.path.exists(FLAGS.checkpoint_dir):
print("Houston tengo un problem: No checkPoint directory found")
return 0
if not os.path.exists(FLAGS.feature_dir):
os.makedirs(FLAGS.feature_dir)
if not os.path.exists(FLAGS.sample_dir):
os.makedirs(FLAGS.sample_dir)
#with tf.device("/gpu:0"):
with tf.device("/cpu:0"):
x = tf.placeholder(tf.float32, [FLAGS.batch_size, FLAGS.output_size, FLAGS.output_size, FLAGS.c_dim], name='d_input_images')
d_netx, Dfx = network.discriminator(x, is_train=FLAGS.is_train, reuse=False)
saver = tf.train.Saver()
with tf.Session() as sess:
print("starting session")
sess.run(tf.global_variables_initializer())
model_dir = "%s_%s_%s" % (FLAGS.train_dataset, 64, FLAGS.output_size)
save_dir = os.path.join(FLAGS.checkpoint_dir, model_dir)
labels = utilities.get_labels(FLAGS.num_labels, FLAGS.labels_file)
saver.restore(sess, save_dir)
print("Model restored from file: %s" % save_dir)
#extracting features from train dataset
extract_features(x, labels, sess, Dfx)
#extracting features from test dataset
extract_features(x, labels, sess, Dfx, training=False)
sess.close()
def extract_features(x, labels, sess, Dfx, training=True):
if training:
data_path = FLAGS.train_dataset
features_path = "features_train.npy"
labels_path = "labels_train.npy"
else:
data_path = FLAGS.test_dataset
features_path = "features_test.npy"
labels_path = "labels_test.npy"
data_files = glob(os.path.join("./data", data_path, "*.jpg"))
shuffle(data_files)
num_batches = min(len(data_files), FLAGS.train_size) // FLAGS.batch_size
#num_batches =2
num_examples = num_batches*FLAGS.batch_size
y = np.zeros(num_examples, dtype=np.uint8)
for i in range(num_examples):
for j in range(len(labels)):
if labels[j] in data_files[i]:
y[i] = j
break
features = np.zeros((num_examples, FLAGS.features_size))
for batch_i in range(num_batches):
batch_files = data_files[batch_i*FLAGS.batch_size:(batch_i+1)*FLAGS.batch_size]
batch = [utilities.load_image(batch_file, FLAGS.image_size, is_crop=FLAGS.is_crop, resize_w=FLAGS.output_size) for batch_file in batch_files]
batch_x = np.array(batch).astype(np.float32)
f = sess.run(Dfx, feed_dict={x: batch_x})
begin = FLAGS.batch_size*batch_i
end = FLAGS.batch_size + begin
features[begin:end, ...] = f
print("Features Extracted, Now saving")
np.save(os.path.join(FLAGS.feature_dir, features_path), features)
np.save(os.path.join(FLAGS.feature_dir, labels_path), y)
print("Features Saved")
sys.stdout.flush()
if __name__ == '__main__':
tf.app.run()7. SVM分类文件train_svm.py文件
作者最后是用svm做了一个简单的分类,这里直接给出代码
from sklearn.metrics import accuracy_score
from sklearn import svm
import numpy as np
accuracy = []
x_train = np.load('features/features_train.npy')
y_train = np.load('features/labels_train.npy')
x_test = np.load('features/features_test.npy')
y_test = np.load('features/labels_test.npy')
print("Fitting the classifier to the training set")
C = 1000.0 # SVM regularization parameter
clf = svm.SVC(kernel='linear', C=C).fit(x_train, y_train)
print("Predicting...")
y_pred = clf.predict(x_test)
print("Accuracy: %.3f" % (accuracy_score(y_test, y_pred)))
accuracy.append(accuracy_score(y_test, y_pred))
print(accuracy)四、实验结果
这个实验的实现过程还稍微有点复杂,首先先运行train_net.py文件,运行完毕之后运行feature.py文件,最后在运行train_svm.py文件。这个模型我是用cpu跑了,跑了一天,运行完train_svm.py文件的最终输出为:
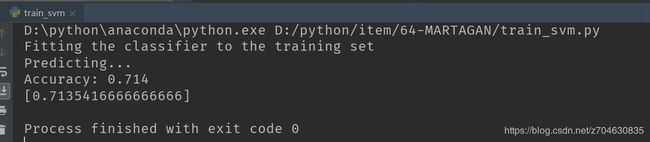
精度为71.35%,跟论文里作者的结果差的还蛮多的,后面再看一下我的生成结果,几乎一片噪声:

就完全没有生成啥结果。。。。。
五、分析
1. 目前只有一个想法,我跑完模型没啥效果,有空我再好好检查一下自己的模型。
2. 关于the UC Merced Land Use Dataset数据集,目前用深度学习做遥感图像的用的还挺多,补充一个用caffe做的例子,参考链接:https://github.com/yangxue0827/CNN_UCMerced-LandUse_Caffe