FreeRTOS --(7)任务管理之入门篇
目录
1、任务状态
2、任务创建
3、任务优先级
4、任务阻塞
5、任务挂起
6、空闲任务
5、任务调度
5.1、抢占式调度
5.2、协作式调度
任务管理是操作系统中重中之重,不管什么 OS ,任务的调度管理都是核心,FreeRTOS 也是一样;在深入到 FreeRTOS 任务管理的源码之前,鄙人觉得有必要先去从全局的角度进行把握,从全局到局部,从粗线条,到细节,鄙人觉得这样方可更快的熟悉相关的内部原理;
从全局来看的话,可以先梳理 FreeRTOS 关于任务相关的 APIs,支持的 Feature,以及相关的特性,这样一来,在深入到源码级分析的话,知道使用场景,便知道为何这样设计;
分析基于 FreeRTOS V 10.3.1
首先,FreeRTOS 任务支持如下特性:
1、多任务执行;
2、支持配置任务优先级;
3、支持任务的阻塞,挂起;
4、任务都是自己的栈空间;
5、支持周期性任务;
6、任务抢占;
7、协作式调度;
1、任务状态
在单核处理器上,多任务是宏观并行,微观串行的;每个任务可以处于不同的状态:
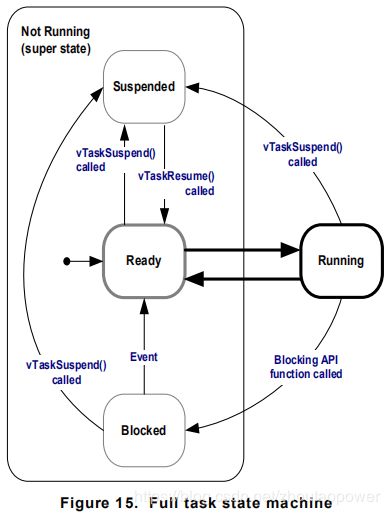
几乎所有的 OS 下,任务都分为了 Ready、Blocked、Running、Suspend 等状态;这样划分是根据具体的使用场景进行的;
Running:指的是正在运行的任务,在单核系统中,同一时刻只有一个任务处于 Running;
Ready:指的是可以被调度运行的任务,也就是处于就绪的任务;
Blocked:指的是因为某种原因(等待资源,等待时间)暂时不满足执行条件的任务的状态;
Suspend:指的是被挂起的任务,暂时不参与调度的状态;
2、任务创建
FreeRTOS 中,创建一个任务使用 xTaskCreate 接口:
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
const char * const pcName,
unsigned short usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * pvCreatedTask);参数的含义如下:
pvTaskCode:任务执行的函数,此函数必须是一个死循环,不会返回。
pcName:任务的名字,是一个字符串;最大长度由宏 configMAX_TASK_NAME_LEN 指定,该宏位于 FreeRTOSConfig.h 文件中。
usStackDepth:任务堆栈的大小,它的单位不是字节,比如在 32-bits 位宽的情况下,这个值设置为 100,那么就是分配了 400 字节大小的堆栈。
pvParameters:传递给任务执行函数的参数。
uxPriority:任务的优先级。
pvCreatedTask:创建任务成功后的任务句柄,后期可以使用这个句柄来调用任务相关的 API。
返回值的含义如下:
Return:如果创建任务成功,返回 pdPASS 否则返回 pdFAIL
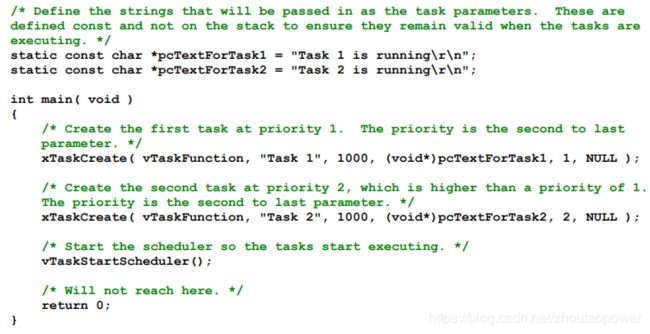
比如:
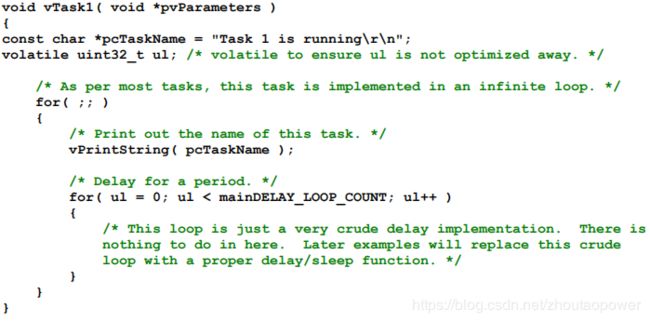
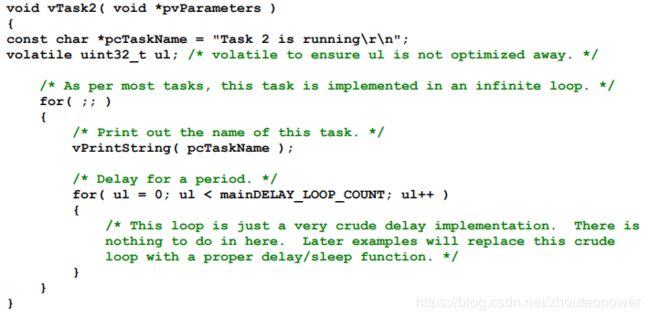
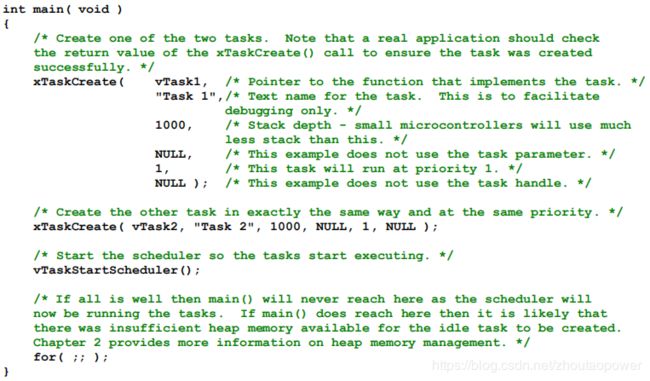
创建了两个任务 vTask1 和 vTask2,堆栈深度为 1000,优先级都为 1,没有入参;
创建完后,两个任务都默认被添加进入了 Ready 状态,调用 vTaskStartScheduler() 开启调度器;
它们的实现都是无限循环,执行的时候,进行打印;
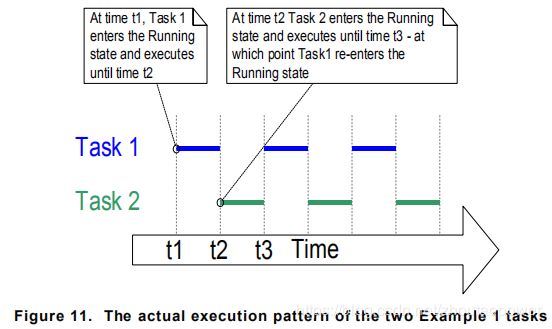
它们在时间线上的执行如图所示:
3、任务优先级
在任务初始化的时候,可以指定任务的优先级,同样在任务运行过程中,也可以通过 API 来改变任务的优先级;
FreeRTOS 支持的最大优先级由 configMAX_PRIORITIES 确定,优先级的值越低,代表优先级越低;0 是最低优先级,所有在 FreeRTOS 中,优先级的范围处于 0 ~ configMAX_PRIORITIES 之间;
因为任务存在优先级不一样,调度器总是选择处于 Ready 状态的优先级最高的任务;
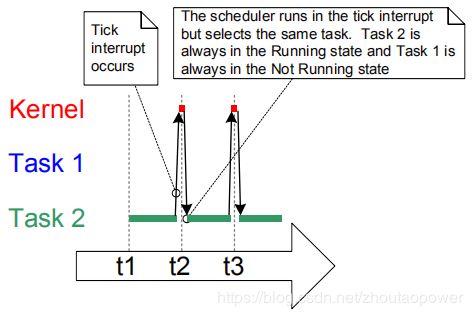
比如:
Task 1 优先级是 1,Task 2 优先级是 2;两个 Task 都是之前的实现的情况下,每次调度器选择任务的时候,因为 Task 2 优先级高,每次都会选择 Task 2,那么 Task 1 就会被饿死:
4、任务阻塞
类似上面的情况,Task 1 被饿死,得不到执行,显然不是我们想要的,归根结底,是因为 Task 2 一直满足执行条件!按照设计来说,Task 2 优先级高,它应该是去做一些急需快速完成的任务,其他任何事情不准阻拦他,但是哪有任务一直都急需被完成呢?所以,正常情况下,Task 2 可能是在等待某个事件(比如,某个中断后)或者某个时间点来完成急需完成的任务,其他时间应该处于一种等待的状态,我们称之为阻塞,也就是 Blocked;
在 FreeRTOS 中,有两种方式可以让任务进入阻塞状态:
1、阻塞在时间上:也就是执行任务的时间未到;
2、等待事件:也就是对应的事件还没有发生;
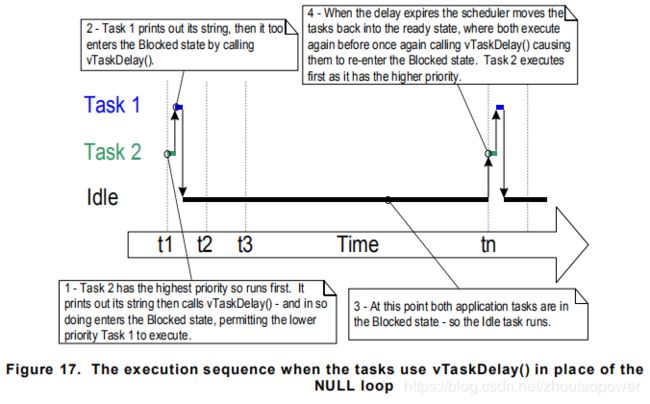
如果类似上面的代码,在死循环里面调用了 vTaskDelay 函数,这就是会导致任务处于阻塞状态,等时间到了指定的延时后,才再次进入 Ready 状态,被调度器调度;
在这种设计下,不同优先级的任务同时运行的时候,就不会有被饿死的情况,同时当两个任务都没有执行的时候,时间让给 IDLE 线程:
5、任务挂起
被挂起的任务,进入 Suspend 状态,调度器在任务选择的时候,不再调度进入 Suspend 状态的任务,除非再次对此任务调用 Resume,重新进入 Ready 队列,接受调度器的调度;
6、空闲任务
在调度器初始化的时候,会创建一个 Idle 任务,这样可以确保至少有一个任务在运行;此任务优先级最低,为 0;
空闲任务用来在处理被删除的任务的内存,所有删除任务后,一定要确保空闲任务被运行,这样才能够内存回收;
FreeRTOS 支持空闲任务的钩子函数,当开启 configUSE_IDLE_HOOK 宏是 1 的时候,在空闲任务的时候,函数:
void vApplicationIdleHook( void );被调用,常用的方式是在此实现低功耗相关的处理逻辑;
5、任务调度
5.1、抢占式调度
FreeRTOS 的任务调度基于周期性的 Tick 心跳,调度器从 Ready 状态列表中选择下一个优先级最高的任务投入运行;被阻塞的任务可以通过 event 来临或者阻塞时间到,重新进入 Ready 状态;
软件上,可以通过配置宏,来改变调度算法的行为,这些宏位于 FreeRTOSConfig.h
configUSE_PREEMPTION:配置为 1 则说明支持抢占式调度,否则称之为协作式调度;
注:协作式调度需要任务主动放弃 CPU,下一个才能够被调度;抢占式调度由系统决定调度;
configUSE_TIME_SLICING :配置为 1 的时候,同样优先级的任务会被轮转调度执行;否则优先级相同的任务,不会被轮转执行,只会执行其中一个;
最常用的配置是,上述两个都配置为 1;
configUSE_PREEMPTION = 1
configUSE_TIME_SLICING = 1
比如有 3 个任务:Task 1、Task 2、Task 3 如下所示,他们的优先级也标记出来;
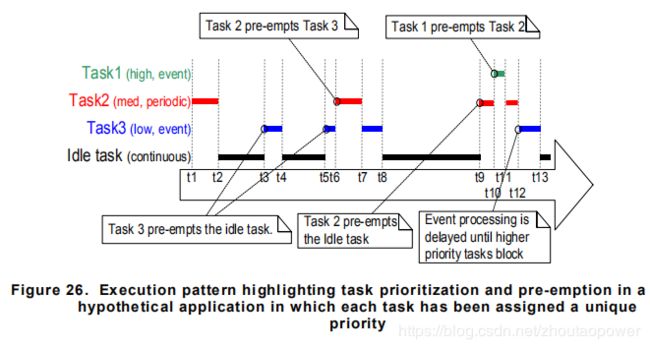
Task 1 处于 blocked 状态,等待 event 满足条件;
Task 2 是周期性任务;
Task 3 是低优先级任务,也处于 blocked 状态,等待它的 event;
t1 时刻,Task 2 执行,Task 1 和 Task 3 的 event 都没满足;
t2 时刻,没有任务执行,Idle 线程执行;
t3 时刻,Task 3 的 event 满足了,被调度执行;
t4 时刻,执行 Idle;
t5 时刻,Task 3 的 event 满足了,被调度执行;
t6 时刻,Task 2 周期性任务来了,优先级高于 Task 3,即便是 Task 3 未执行完,OS 依然调度 Task 2 先执行;
t7 时刻,Task 2 执行完毕,OS 调度 Task 3;
t8 时刻,没有需要调度的任务,进入 Idle;
t9 时刻,Task 2 周期性任务来了,被调度;
t10时刻,最高优先级的 Task 1 的 event 满足,即便是 Task 2 未执行完,OS 依然调度 Task 1 执行;
t11 时刻,Task 1 执行完毕,继续调度尚未执行完毕的 Task 2;此刻低优先级的 Task 3 的 event 虽然也满足,但是优先级低,执行被推后;
t12 时刻,Task 2 执行完毕,Task 3 得以被调度;
t13 时刻,没有任务活动,调度 Idle 线程;
在 configUSE_PREEMPTION 和 configUSE_TIME_SLICING 都配置为 1 的时候,如果线程和 Idle 线程一样优先级,那么他们会被轮转调度:
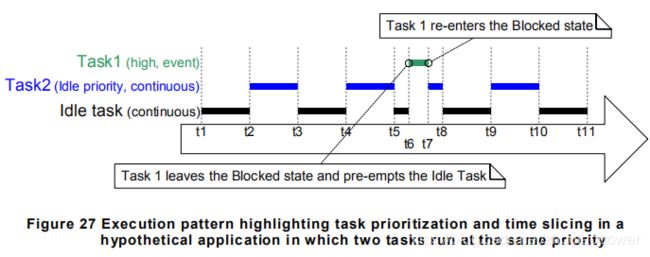
上面的调度过程不在多说,Task 1 优先级最高,当满足他的 event 的时候,抢占其他任务执行,随后进入 blocked 状态;
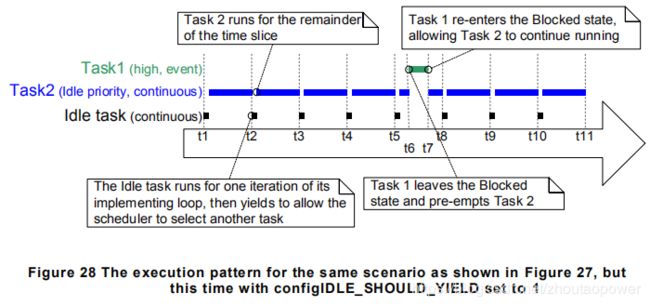
在上面的例子中(有任务和 Idle 线程一样连续执行并且优先级一样),还有一个宏 configIDLE_SHOULD_YIELD,可能会导致调度器行为变化:
configIDLE_SHOULD_YIELD = 0,那么行为和上面的一样,也是默认情况;
configIDLE_SHOULD_YIELD = 1,那么 Idle 线程会 loop 一次然后主动让出 CPU,如下所示:
如果 :
configUSE_PREEMPTION = 1
configUSE_TIME_SLICING = 0
这表示调度器支持抢占,但是对于同样优先级的任务,不会去轮转,比如:
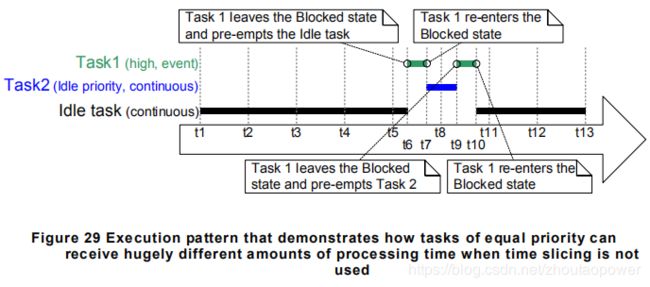
可以看到 Task 1 优先级高,可以抢占低优先级;
但是 Task 2 和 Idle 优先级一样,但是得不到轮转的调度;
5.2、协作式调度
当配置如下:
configUSE_PREEMPTION = 0
configUSE_TIME_SLICING = any value
代表调度器会进行协作式调度,什么意思呢?如下所示:
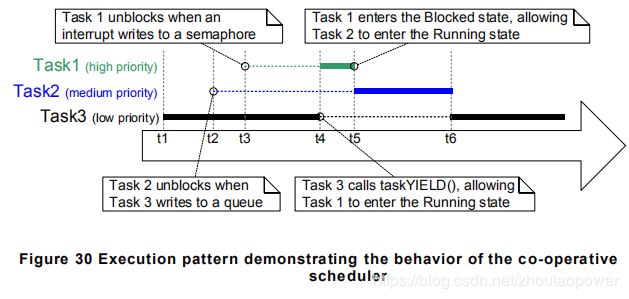
Task 1 优先级最高,Task 2 其次,Task 3 优先级最低;
t1 时刻,Task 3 处于运行,Task 1 和 Task 2 处于阻塞;
t2 时刻,Task 2 满足运行条件进入 Ready 状态,但是由于不支持抢占调度,所以无法执行,Task 3 继续执行;
t3 时刻,Task 1 满足运行条件进入 Ready 状态,但是由于不支持抢占调度,所以无法执行,Task 3 继续执行;
t4 时刻,Task 3 主动调用 taskYIELD() 函数,主动放弃 CPU,此刻调度器选择优先级最高的 Task 1 进行运行;
t5 时刻,Task 1 执行完毕,进入 blocked,调度器调度 Task 2 运行;
t6 时刻,Task 2执行完毕,进入 blocked,调度器调度 Task 3运行;