NB-IOT开发|nbiot开发教程《三》AT指令类模组驱动-STM32实现AT指令状态机
嵌入式开发中我们要时刻保持代码的高效与整洁
看之前,先点赞
好习惯,要养成一、前言
嵌入式开发中我们要时刻保持代码的高效与整洁。在第一节中“NB-IOT开发|nbiot开发教程《一》AT指令类模组驱动解析”我们说到AT指令模组最好的驱动-状态机。本节我们就开始编写状态机。
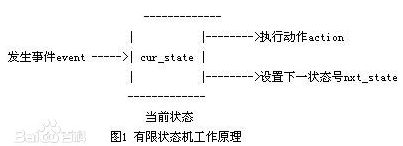
目前网上可以看到的状态机如下图:
u8 NB_IoT_ack_chack(u8 *str)
{
delay_ms(10);
if(USART2_RX_STA!=0)
{
USART2_RX_STA=0;
if(strstr((const char*)USART2_RX_BUF,(const char*)str))//符合预期
{
memset(USART2_RX_BUF,0, sizeof USART2_RX_BUF);
return 0;
}
else //不符合预期
{
memset(USART2_RX_BUF,0, sizeof USART2_RX_BUF);
return 1;
}
}
else
{
memset(USART2_RX_BUF,0, sizeof USART2_RX_BUF); //清空数组
return 1;
}
}
u8 NB_IoT_ZDFW()
{
u8 x=0;
cmd1: send_NB_IoT("AT+NCONFIG=AUTOCONNECT,TRUE\r\n") ;
if(!NB_IoT_ack_chack("OK")) x++ ;
else goto cmd1;
cmd2: send_NB_IoT("AT+CFUN=1\r\n") ;
if(!NB_IoT_ack_chack("OK")) x++ ;
else goto cmd2;
cmd3: send_NB_IoT("AT+NRB\r\n") ;
if(!NB_IoT_ack_chack("REBOOTING")) x++ ;
else goto cmd3;
}delay_ms(10); 对,你没有看错就是delay,死等,多么可怕的应用。而且死等10ms就一定能收到数据吗,有些模组中的指令返回时间并不是固定的,可见delay并不是很合适的使用,如果延时1s呢?????,如果此时有按键或者有屏幕刷新,1s的延时能接受吗??,显然是不能的。本次状态机拒绝使用死等!
二、代码实现
举例:
状态:
1.发送AT确认模组是否正常;2.配置模组参数;3.发送数据;(暂定三个状态)
动作:
1.发送AT确认模组是否正常->通过串口发送AT\r\n,模组正常会返回OK,模组不正常返回非OK数据或者不返回。
2.配置模组参数->通过串口发送AT+PARAM=10\r\n,模组正常会返回OK,模组不正常返回非OK数据或者不返回。
3.发送数据->通过串口发送AT+SEND=2030559498473738292929394\r\n,模组正常会返回OK,模组不正常返回非OK数据或者不返回。
事件:
状态机进行状态切换需要事件驱动。
事件1:状态强制切换事件(event_change_state),用于将状态机强制切换到某个指定状态或者下一状态。
事件2:串口接收到完整数据包事件(event_uart_data),模组返回数据。
事件3:超时事件(event_timeout),例如发送AT后模组在1s或者指定时间内没有返回任何数据。
状态:
typedef enum
{
STATE_HAL_RESET= 0x01, /*模组复位*/
STATE_AT, /*发送AT指令测试*/
STATE_SET_PARAM, /*设置参数*/
STATE_SEND_DATA, /*发送数据*/
STATE_IDEL, /*空闲状态*/
} nbiot_state_e;结合上图1中状态机我们用语言描述下AT指令。例如发送AT模组返回OK,首先这个具有两个状态,一个是当前状态,一个是下一状态;具有的动作就是发送AT,模组返回OK,两个执行动作;在实际使用时可能会存在模组不回复或者回复错误的时候,所以要尝试,尝试要记录重试次数try_cnt;发送完AT后模组要有一个反应时间,就是MCU等待时间,这个时间不确定,每条指令等待时间不一样,计做wait_time;
现在用C语言结构体描述上述文字
typedef struct
{
nbiot_state_e cur_state; /*当前状态*/
nbiot_state_e next_state; /*下一个状态*/
int try_cnt; /*重试次数*/
int wait_time; /*等待时间*/
int (*action1)(void); /*动作1:发送AT*/
int (*action2)(const void *arg,int len); /*动作2:判断接收到的数据是否为OK或者未接收到*/
} nbiot_fsm_state_t;状态描述完了,还需要有一个游动指针指向当前正在执行的状态。
typedef struct
{
int cur_state; /*当前状态*/
int trycnt; /*当前状态已经重试的次数*/
uint32_t init; /*当前状态是执行action1还是执行action2*/
const nbiot_fsm_state_t *fsm_state; /*当前状态是功能参数*/
} nbiot_fsm_state_index_t;
static nbiot_fsm_state_index_t nbiot_fsm_state_index;状态中的两个执行动作C语言描述:action1->发送AT
action2:->判断接收到的数据是否为OK,如果是则执行下一状态,如果不是则等待,如果超时未收到数据就重试。
/*
* AT
*/
static int at_action1(void)
{
const char *cmd = "AT\r\n";
return cola_device_write(uart_dev,0,cmd,strlen(cmd));
}
static int at_action2(const void *arg,int len)
{
if(!len)
return STATE_RETRY;
char *pt = memmem(arg, len, "OK", strlen("OK"));
if (pt)
{
return STATE_NEXT;
}
return STATE_WAIT;
}每一个状态都写两个执行动作。
全部的状态列表:
static const nbiot_fsm_state_t nbiot_state_list[] =
{
{STATE_HAL_RESET,STATE_AT, 1, 300,nbiot_reset_action1,nbiot_reset_action2},
{STATE_AT, STATE_SET_PARAM,3, 3000,at_action1, at_action2 },
{STATE_SET_PARAM,STATE_SEND_DATA,4, 3000,set_param_action1, set_param_action2 },
{STATE_SEND_DATA,STATE_IDEL, 5, 3000,send_data_action1, send_data_action2 },
{STATE_IDEL, STATE_IDEL, 100,3000,state_idel_action1, state_idel_action2 },
};状态写完了接下来还需要一个状态管理的函数,负责管理是执行action1还是执行action2;
状态管理函数:状态管理函数中等待模组返回数据采用的是软定时器,该方式很好的避免了死等问题。
状态和执行动作完成了,接下来就是事件,驱动状态机运行的驱动力--------事件。
事件1:状态强制切换事件
更新游动状态指针,并且给任务发送状态改变的信号cola_set_event(&nbiot_task,SIG_CHANGE_STATE);
static void nbiot_change_state(nbiot_state_e state)
{
const nbiot_fsm_state_t *fsm_state = nbiot_get_state(state);
if(fsm_state)
{
nbiot_fsm_state_index.init = ACTION1;
if(nbiot_fsm_state_index.cur_state != state)
{
nbiot_fsm_state_index.cur_state = state;
nbiot_fsm_state_index.trycnt = 0;
nbiot_fsm_state_index.fsm_state = fsm_state;
}
cola_set_event(&nbiot_task,SIG_CHANGE_STATE);
}
}事件2:串口接收到完整数据包事件
上一节“NB-IOT开发|nbiot开发教程《二》AT指令类模组驱动-STM32串口实现接收不定长度数据”中提到的,不明白可以再看下。
串口接收到完整数据包后通知nbiot任务,cola_set_event(uart1_dev.owner,SIG_DATA);
static void uart_timer_cb(uint32_t event)
{
if(uart1_dev.owner)
{
cola_set_event(uart1_dev.owner,SIG_DATA);
}
}事件3:超时事件
static void nbiot_timer_cb(uint32_t event)
{
cola_set_event(&nbiot_task,SIG_TIMEOUT);
}三个驱动状态机运行的时间就完成了,既然这三个事件是驱动力,那么就需要在任务中管理这三个驱动事件。
事件管理
static void nbiot_task_cb(uint32_t event)
{
int err = 0;
if(event & SIG_CHANGE_STATE)
{
nbiot_fsm_schedule(NULL,0);
}
if(event & SIG_TIMEOUT)
{
nbiot_fsm_schedule(NULL,0);
}
if(event & SIG_DATA)
{
err = cola_device_read(uart_dev,0,g_buf,sizeof(g_buf));
if(err)
{
nbiot_fsm_schedule(g_buf,err);
}
}
}
三、调试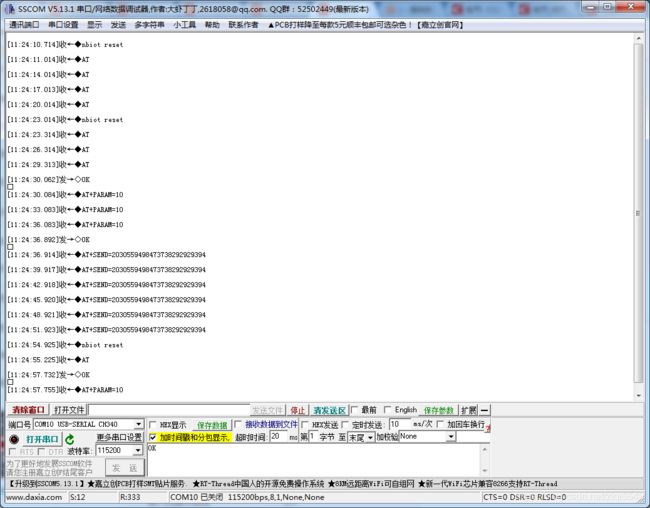
状态机已经跑起来了,确实按照我们状态列表中编写的在跑,首先运行第一个状态硬件复位,300ms后执行AT指令发送,发送一次AT,尝试3次,而且等待时间为3000ms,如果尝试超过最大次数,则从新复位nbiot模组。如果接收到OK则执行下一个状态。
四、代码下载
重要的就是代码下载了,不知道有木有人在看呀,等评论超100再上传吧,要不然没有动力写下去了。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。