自动驾驶开源仿真平台概述
一个完备的无人驾驶系统,可以分为:
- Perception
无人车如何能够识别周边的环境; - Localization
如何过滤这些无用信息,将客观世界进行3D甚至4D还原; - Planning
在不确定的、动态的环境下,如何让无人车做出正确的判断和计划; - Control
把各个元器件集成起来,能够和谐的工作,沿着规划的路线、速度等进行安全的行驶。
在直接将无人驾驶汽车在道路上运行前,需要通过仿真的方式训练和验证无人驾驶汽车在不同的场景下系统的性能。从测试方式方式上讲,可以将其分为两种:
-
虚拟环境模拟
通过对环境进行模型,获得感知数据,如图像、IMU、GPS、LiDAR等,用于感知、规划、运动控制的初步开发,如Carla、AirSim、 Gazebo CarDemo,动力学仿真(Prescan,Carsim,ASM)。 -
真实环境回放
在实际环境中采集真实的数据,包括图像、LiDAR等,然后在进行回放,用于测试信息融合、车辆性能等,如Apollo,Autoware。
Carla
支持ROS bridge。
英特尔实验室联合丰田研究院和巴塞罗那计算机视觉中心联合发布 CALRA,用于城市自动驾驶系统的开发、训练和验证的开源模拟器,支持多种传感模式和环境条件的灵活配置。


AirSim
支持ROS。
AirSim 是微软开源的一个跨平台的建立在虚幻引擎( Unreal Engine)上的无人机以及其它自主移动设备的模拟器。 它支持硬件在循环与流行的飞行控制器的物理和视觉逼真模拟。
AirSim 的目标是作为AI研究的平台,以测试深度学习、计算机视觉和自主车辆的增强学习算法。为此, AirSim 还公开了 API,以平台独立的方式检索数据和控制车辆。

Gazebo CarDemo
完全基于ROS开发。
Gazebo平台可以提供在复杂的室内和室外环境中准确有效地模拟训练机器人的能力。
在无人驾驶车辆测试方面,ROS和Gazebo开发CarDemo,车辆的油门、刹车、转向和传动都是通过一个ROS系统去控制。所有传感器数据都是通过ROS发布,并且可以用RVIZ可视化。利用Gazebo功能整合现有的模型和传感器,构建城市模型和一个高速公路交互场景,垃圾箱、交通锥和加油站等都来自Gazebo模型库。在车顶处搭载一个16线激光雷达,8个超声波传感器,4个摄像头和2个平面激光雷达。该平台基于C++开发,系统要求ROS+Ubuntu环境。

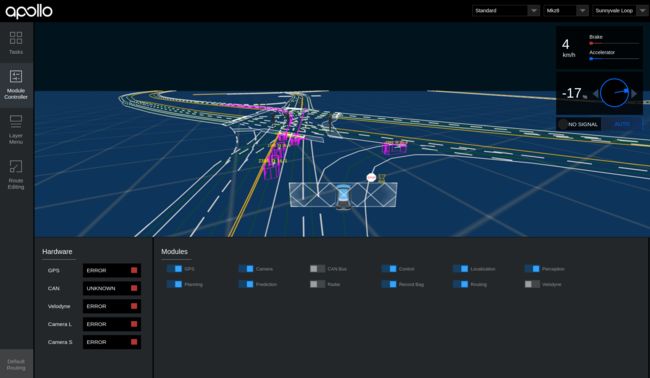
Apollo
基于 ROS 开发。
Apollo是百度公布的开源自动驾驶平台,是支持完全自动驾驶功能的高性能灵活架构。
Autoware
基于ROS1和ROS2开发。


Autoware是用于城市自主驾驶的开源平台,支持以下功能:
- 路径规划
- 路径跟随
- 加速/制动/转向控制
- 汽车/行人/物体检测
- 交通信号检测
- 交通灯识别
- 车道检测
- 软件仿真
- 虚拟现实等。