031_Linux驱动下的RS485总线
一、RS485硬件原理
差分对传输数据的原理,IO数据的传输-------》差分对。
RS232传输的距离在15米以下,RS485传输距离是几十米到1000米以上。
为什么485可以传输这么远?差分对的机制可以降低电磁场的干扰、衰减。
485传输距离和传输线有关系 注意:双绞线和屏蔽线。
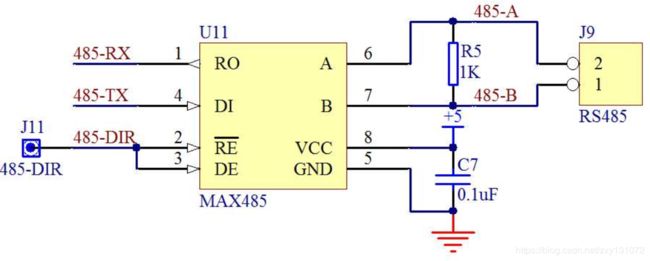
485原理图:
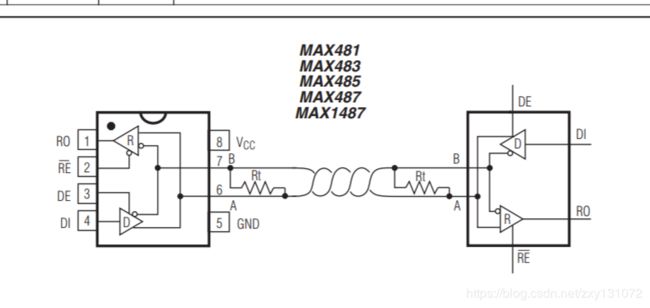
嵌入式上一般使用串口转485
串口的信号转化为485:D→(A,B)DE高电平,RE高电平
485信号转化为串口信号:(A,B),DE低电平,RD低电平
二、RS485驱动
1、RS485驱动
串口驱动在源码顶层目录下的drivers/char/max485_ctl.c
485驱动=串口驱动+GPIO的字符驱动
XURTS1高电平发送,低电平接收
GPIO是GPA0_7,串口设备节点是ttySAC1)
驱动中只需要操作GPIO
设备节点/dev/max485_ctl
在应用层中,控制GPIO和串口=类似led+串口的操作
ioctl是参数是1,则输出高电平,发送
ioctl是参数是0,则输出低电平,接收
串口的节点/dev/ttySAC1

![]()
2、注册设备
#ifdef CONFIG_MAX485_CTL
struct platform_device s3c_device_max485_ctl = {
.name = "max485_ctl",
.id = -1,
};
#endif

#ifdef CONFIG_MAX485_CTL
&s3c_device_max485_ctl ,
#endif
config MAX485_CTL
bool "Enable MAX485 pin config"
default y
help
Enable MAX485 pin config


三、驱动测试源码
max485_ctl.c
#include 四、Makefile
#!/bin/bash
$(warning KERNELRELEASE = $(KERNELRELEASE))
ifeq ($(KERNELRELEASE),)
#内核的源码路径, ?= 条件赋值, uname -r 得到内核版本号
KERNELDIR ?= /home/mint/itop/linux_3.0
# := 立即赋值, 得到当前的绝对路径
PWD := $(shell pwd)
# -C 切换工作路径, $(MAKE) = make
modules:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions Module* modules*
.PHONY: modules clean
else
# 生成模块
obj-m := max485_clt.o
endif
五、应用层测试源码
#include 六、测试
运行程序
发送./test_485 /dev/ttySAC1 1
测试程序发送的信息:iTOP-4412: max485 test app(times:%d)
接收./test_485 /dev/ttySAC1 0