ROS学习【14】-----利用ROS中的导航框架(move_base,amcl),实现基于gazebo仿真机器人的自主导航
@TOC
上次的ROS学习,我们通过SLAM框架下的gmapping及hector_slam实现了手动控制我们Gzebo仿真机器人进行地图的规划,并保存了相应的地图,那么如何让自己人按照我们规划的路线,或者是他自己规划相应的路线,进而完成在封闭环境下的自主导航呢?这就是本次博客,林君学长为大家介绍的,如何通过ROS中的导航框架(move_base,amcl),实现基于gazebo仿真机器人的自主导航,小伙伴们一起来看吧!
- ubuntu版本:ubuntuKylin16.04
- ROS版本:ROS-kinetic
- Gazebo版本:Gzebo-7.1.6
一、功能包准备阶段
1、gazebo封闭模型的准备
1)、上次ROS学习的博客,我们已经搭建完成了gazebo的封闭环境模型,本次,我们可以继续用搭建的模型:刚来的小伙伴可以找一找林君学长上次的ROS学习的博客哦,进行进行封闭环境的搭建
gazebo封闭环境模型搭建链接
2、导航框架包的准备
1)、该导航框架的所有代码都集成到上次博客的功能包

2)、大家可以去林君学长的资源站进行下载,链接如下:
https://download.csdn.net/download/qq_42451251/12289534
3、move_base及amcl导航仿真控件的安装
1)、打开终端,进行move_base控件的下载
sudo aptitude install ros-kinetic-move-base
由于林君学长的控件是已经安装好了的,所以上图的结果,小伙伴在进行下载的时候,记得按提示输入shi,然后等下下载,由于是访问的国外网站进行下载,所以下载速度会非常的慢,小伙伴记得耐心等待哦!
2)、进行amcl控件的下载
sudo aptitude install ros-kinetic-amcl
这里同上,文件并不大,只有几百Kb,但是下载很慢,请耐心等待!
4、ROS工作区编译
1)、进入ROS工作区
cd ~/ros
2)、进行程序编译
catkin_make
当编译百分之百的时候,才能算编译成功,如果过程中编译失败,则可以根据相应的提示进行修改,或下载控件、或修改Cmake文件!
5、程序注册
)、在ROS工作区进行程序注册
source devel/setup.bash
二、move_base实现最优全局路线规划导航
1、运行gazebo封闭环境模型
1)、关闭以上所有终端,然后新建终端,进行gazebo封闭环境的运行
cd ~/ros
2)、输入以下命令,运行之前搭建的封闭环境
roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
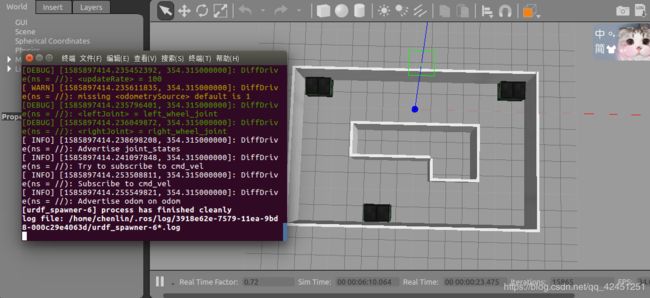
3)、运行结果如下所示:
2、新建终端运行move_base,进行最优路线规划
1)、最小化刚才的终端,然后新建终端,运行move_base,记得不要关闭哦
cd ~/ros
2)、运行move_base
roslaunch mbot_navigation nav_cloister_demo.launch
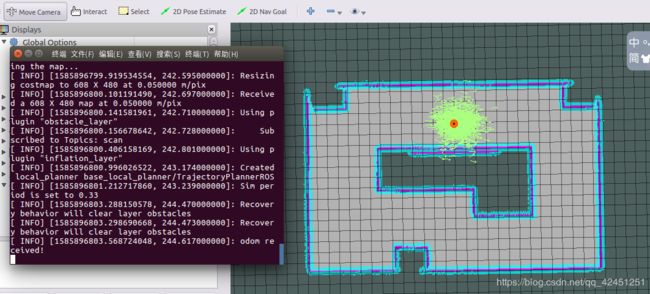
3)、运行结果如下所示:
3、进行路线规划
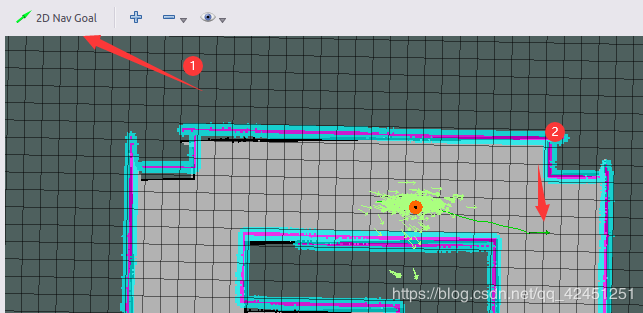
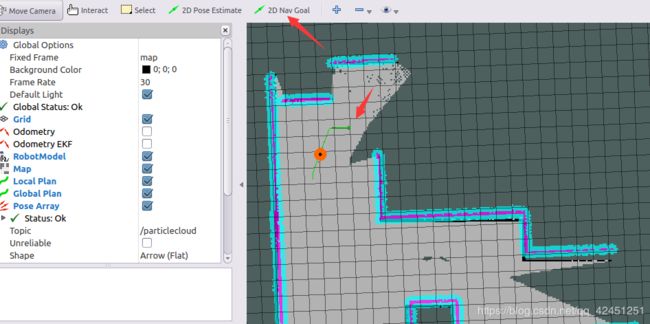
1)、点击上面工具栏的2D Nav Goal,然后再地图上点击,设置目的地点,自动规划最优路径,然后让机器人移动:
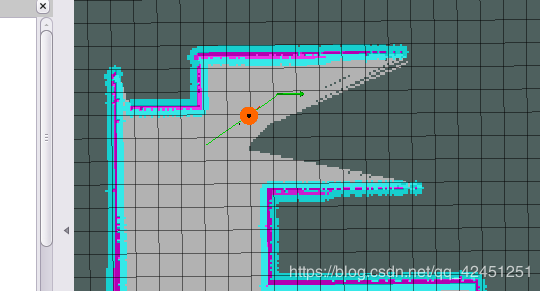
2)、在地图上规划路线:
3)、机器人的移动过程
可以看到,机器人已经一定到我们指定的位置!
三、amcl实现仿真机器人的自主导航
1、关闭上面运行move_base的终端,然后新建终端,运行amcl,实现机器人的自动导航
1)、新建终端,输入以下命令进行amcl的运行
roslaunch mbot_navigation exploring_slam_demo.launch
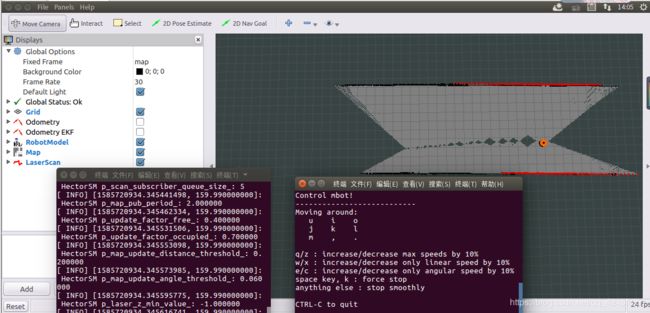
2)、运行后打开RViz的图像如下所示:
2、手动进行路线规划
1)、点击上面菜单工具栏的2D Nav Goal,进行手动规划路线
2)、机器人的移动过程
3、运行自主导航python文件,实现机器人的自主导航
1)、上面的终端不要关闭,新建终端,运行自主导航的python文件
rosrun mbot_navigation exploring_slam.py

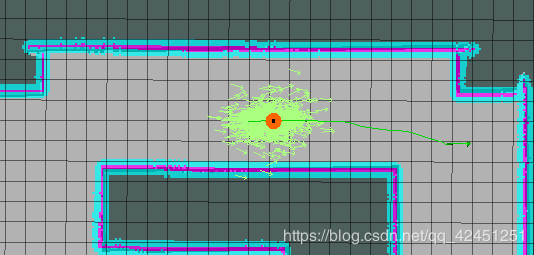
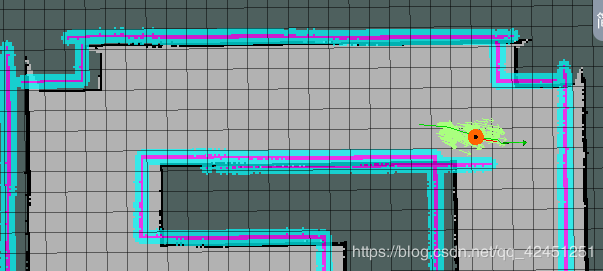
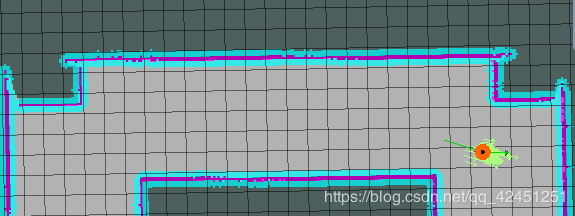
2)、可以看到,机器人已经开始自动导航了
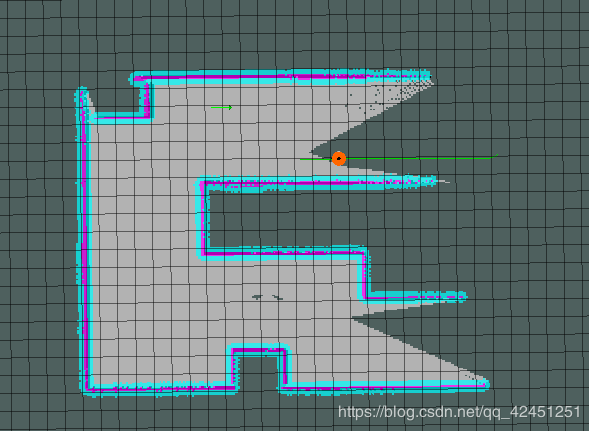
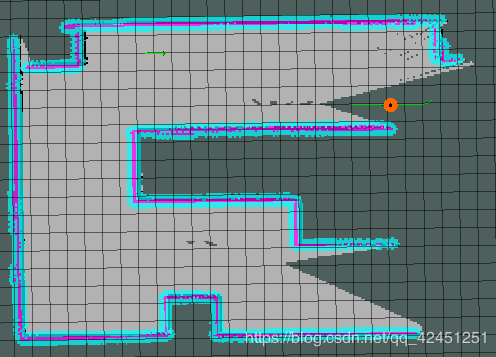
上面可以看出,一张地图跑完,gazebo仿真机器人自动规划完成,只要我们不终止python文件程序,机器人就会自己一直导航,进行最优路径规划,这就是未来人工智能的发展趋势吧,或许!
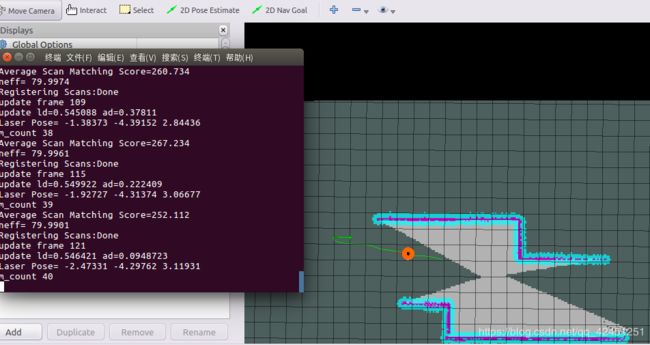
3)、在运行过程中,amcl终端一直在更新机器人的位置信息哦:
4、依次关闭终端,结束本次实验
温馨提示:以上所有的launch文件在运行之前,都记得为他们添加权限,不然在运行的时候可能会报错哦!
四、修改配置参数,调配机器人移动速度和运行自己封闭环境的地图
1、如何对自己搭建的环境地图上进行机器人自主导航
1)、首先,将自己搭建的环境通过键盘控制小车,将地图标记完整,然后保存地图
- 运行自己搭建环境launch文件
roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
- 运行hector_demo控件,进行我们设计的整个封闭环境的地图规划
roslaunch mbot_navigation gmapping_demo.launch
运行键盘控制器
roslaunch mbot_teleop mbot_teleop.launch
记住,一定要通过键盘控制小车,跑完自己的规划的整体地图,只有将地图完全显示出来,然后保存,后面才会有效果哦!
2)、将整个地图规划完整之后,保存地图到功能包mbot_navigation下的maps文件夹下面,命名为自己想要命名的文件名,比如map1:
rosrun map_server map_saver -f /home/chenlin/ros/src/mbot_navigation/maps/map1
3)、打开mbot_navigation文件下的launch文件夹中的=nav_cloister_demo.launch文件,并修改文件中的地图配置,修改为自己的地图的yaml文件就好:
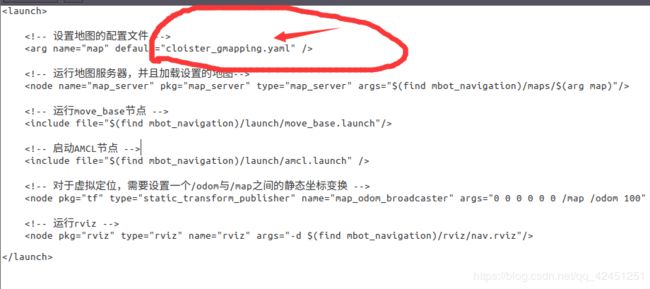
修改后保存并关闭,这样,再次运行这个文件就可以在我们自己的地图上面进行导航啦!
2、如何调配机器人的自主导航的速度
1)、哈哈,这个林君学长暂时还没有发现,后续发现了再更新此博客哦!
以上就是本次博客的全部内容哦,希望小伙伴对本次博客的阅读,可以帮助你们理解gazebo机器人的自主导航!
遇到问题的小伙伴,记得评论区留言,林君学长看到了会给大家解答的,这个学长不太冷!
陈一月的又一天编程岁月^ _ ^