INPHO常见问题处理之Match_at
INPHO常见问题处理之Match_at
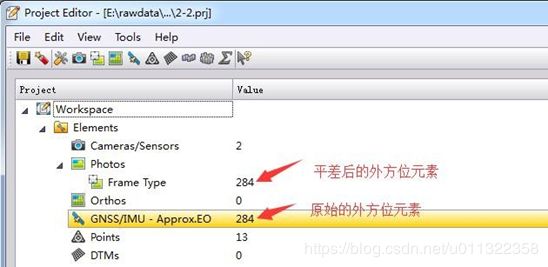
1.Match_at 之 pos 辅助平差相关设置
使用不同精度 pos 辅助控制点平差时,可减少控制点数量达到精度要求;
1 关于 pos 辅助平差时其权重的设置:先使用无 pos 辅助仅控制点平差,记录其像方中 误差 sigma 值;然后利用 pos 设备宣称精度或者记录无 pos 辅助时平差前后 pos 信息改正量 作为其权重初始值,辅助控制点平差,若是 sigma 值陡增,说明 pos 权重过大,其值应调大, 重新平差做调整直至与无 pos 平差时 sigma 值相仿。
2 关于 pos 辅助平差时控制点分布及数量要求:需要控制点在测区内均匀分布;不同精 度的 pos 信息辅助平差时,需要的控制点分布密度不同;pos 精度越高,需要的控制点越少; pos 精度降低,需要适度增加控制点分布密度,来保证测区精度。
比如测区 pos 平面相差 3m 以上,高程相差 1m 以上,GNSS 权重先设 3,3,1,勾选 gnss 辅助平差,若平差结果整体中误差 sigma 比原来未加 pos 时平差 sigma 值大幅增大,比如原 来 2 微米,添加 pos 后变成 20 微米,说明 pos 权重设置过大,与控制点冲突,影响工程整 体精度,建议 pos 权重适当变小值增大继续平差,直至 sigma 与未添加 pos 时的 sigma 相差 不多,即说明 pos 权重设置接近实际情况。
 其次,平差时要勾 use GNSS
其次,平差时要勾 use GNSS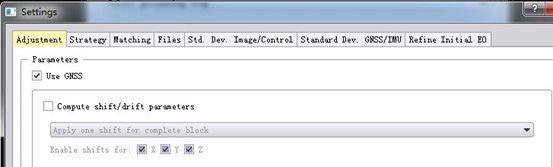 在对应的 pos 权重设置栏设置 pos 解算的初始值
在对应的 pos 权重设置栏设置 pos 解算的初始值
2 match_at 之影像调色相关
如果原始影像之间由于飞行光照条件不一样或者不同批次影像等原因造成影像色彩差 异大,可以在 image commander 中使用 vignetting、radiometrix 和 tilting 工具进行色彩预处 理,三种工具都不会对影像本身做改变,仅会生成.rdx 颜色索引文件 Vignetting 工具对影像内部匀光预处理、tilting 工具对影像间匀色预处理;两种工具都建议 选中全部影像处理Cleo « »rre»i »ns Close
Vignetting 工具对影像内部匀光预处理、tilting 工具对影像间匀色预处理;两种工具都建议 选中全部影像处理Cleo « »rre»i »ns Close
e s s age s / Pv o y e s s ’
NOTE: Vignetting is alnays applied to all images of the project! ’ Using project C:lprj templ wangzhuanglprj8. 011.prj .
Running vignetting adjustment
Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extracting color information Extractine color information
Bron t nage DSC 66246 Bron trage DSC 66219 Bron Image DSC 66127 Bror Image DSC 66249 Bron t nage DSC 66216 Bron trage DSC 66128 Bron Image DSC 66248 Bror Image DSC 66217 Bron t nage DSC 66129 Bron trage DSC 66181 Bron Image DSC 66138 Bror Image DSC 66131 Bron t nage DSC 66183 Bron trage DSC 66132 Bron Image DSC 66182 Bror Image DSC 66133 Bron t nage DSC 66185 Bron trage DSC 66134 Bron Image DSC 66184 Bror Image DSC 66135 Bron t nage DSC 66187 Bron trage DSC 66136 Bron Image DSC 66186 Bror Image DSC 66137 Bron t nage DSC 66189 Bron trage DSC 66138 Bron Image DSC 66188 Bror Image DSC 66139 Bron t nage DSC 66148 Bron trage DSC 66141 Bron Image DSC 66142 Bror Image DSC 66194 Bron t nage DSC 66143 Bron trage DSC 66236 Bron Image DSC 66193 Bror Image DSC 66144 Bron t nage DSC 66237 Bron trage DSC 66192 Bron Image DSC 66145 Bror Image DSC 66191
Bron t naee DSC 661
·radiometrix 中可以对单个或者多个影像进行色彩定义 自动\手动对比度调整 若是 16bit 影像(ADS 或者卫星影像)在 8bit 显示器显示往往会特别暗,可选中
若是 16bit 影像(ADS 或者卫星影像)在 8bit 显示器显示往往会特别暗,可选中
,对直方图进行拉升即可
自动\手动强度调整
 强度\对比度、饱和度及色彩调整;此三项在色域空间中分别由一个点代表一张影像,其在 空间中的位置代表其对应强度\对比度、饱和度及色彩属性;可以选中单点或者多点调整其 在空间中的位置,达到调整影像色彩目的;所有调整都记录在.rdx 颜色索引文件中;在输出 最终正射影像的时候才会将 rdx 文件写入影像中
强度\对比度、饱和度及色彩调整;此三项在色域空间中分别由一个点代表一张影像,其在 空间中的位置代表其对应强度\对比度、饱和度及色彩属性;可以选中单点或者多点调整其 在空间中的位置,达到调整影像色彩目的;所有调整都记录在.rdx 颜色索引文件中;在输出 最终正射影像的时候才会将 rdx 文件写入影像中
3 INPHO 成果导入 IX4 测图流程

 3 进入到单模型模块,选择 patb 工程目录,即.adj 和.im 文件所在文件地址。
3 进入到单模型模块,选择 patb 工程目录,即.adj 和.im 文件所在文件地址。
Ps:务必将 adj.adj 和 iamge.im 放置到同一文件中
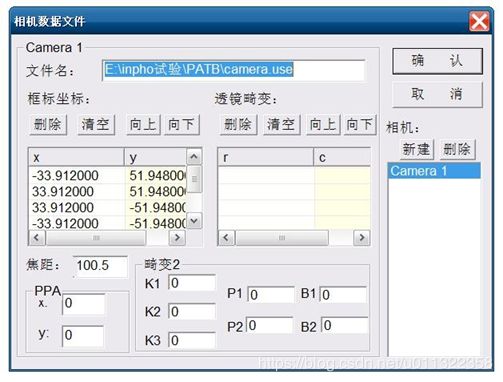
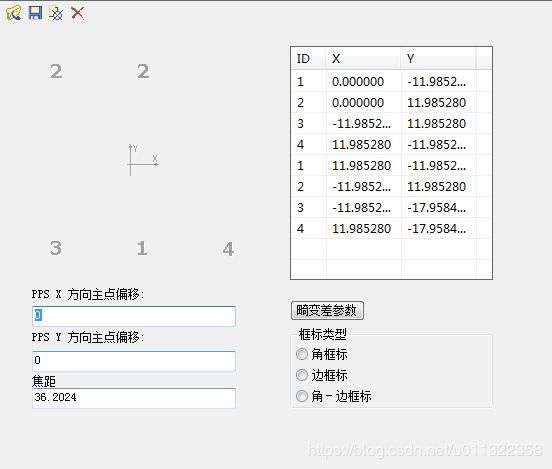
 4 设置工程中所用相机文件参数
4 设置工程中所用相机文件参数
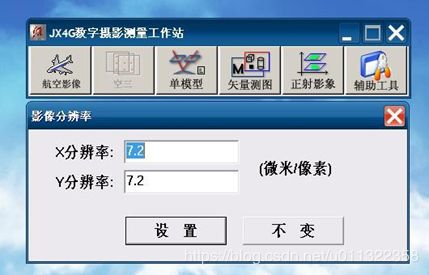
 5 设置影像路径
5 设置影像路径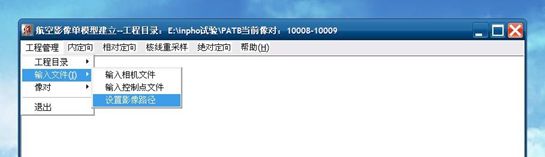
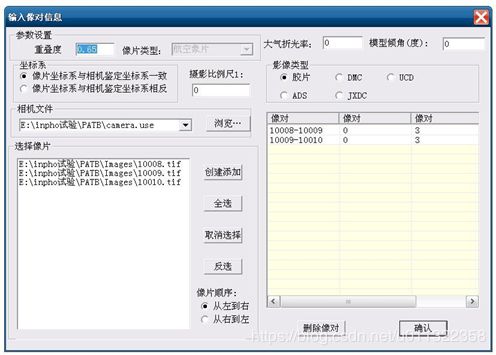
 6 建立影像像对
6 建立影像像对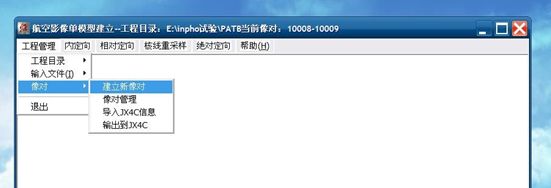
 8 进入到像对管理中,设置空三成果格式和文件路径
8 进入到像对管理中,设置空三成果格式和文件路径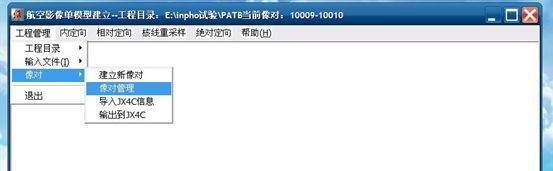
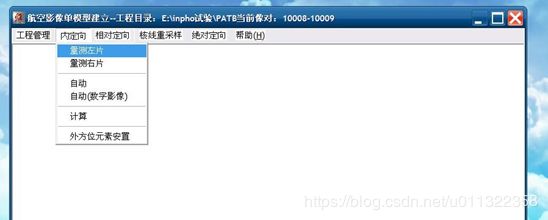
 10 影像内定向。先建立单个影像内定向模板,对其它影像进行自动内定向,具体如下:
10 影像内定向。先建立单个影像内定向模板,对其它影像进行自动内定向,具体如下:
(1) 进入到内定向列表中,分别;量测一个影像的左影像和右影像
(2) 进入到内定向列表中,选择自动(数字影像),以对剩余影像进行自动内定向
 11 进入到像对管理中个,将所有影像的相对定向和核线重采样设置为需要做,再利用执 行批处理来对所有影像同时进行相对定向和核线重采样。
11 进入到像对管理中个,将所有影像的相对定向和核线重采样设置为需要做,再利用执 行批处理来对所有影像同时进行相对定向和核线重采样。 12 进入到绝对定向中,进行量测和定义工作区
12 进入到绝对定向中,进行量测和定义工作区
5 inpho 至 mapmatrix 导入的相关问题
Inpho 成果导入至 Mapmatrix 进行测图,一般选择 inpho 工程导出 ZI 格式,也可以 inpho
工程文件直接导入至 Mapmatrix(inpho6.1 以前版本工程文件)。
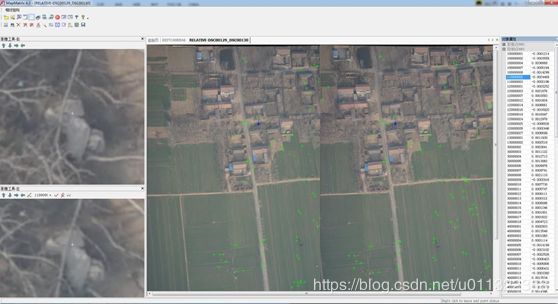
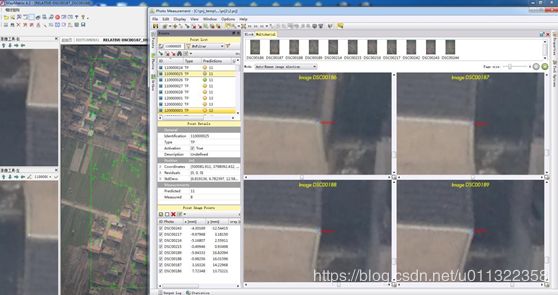
第三方格式的空三成果导入至 Mapmatrix 中,显示立体效果有两种:实时核线像对以及 核线像对;实时核线像对利用显卡实时计算显示区域的核线影像构成立体,不需要事先采集 核线即可,主要针对无人机类的小框幅影像;核线像对需要事先采集核线影像构成像对,主 要针对专业量测相机类的大框幅影像,立体效果好显示稳定;
空三成果导入后首先要检查成果是否导入正确;检查的标准有:
A 相对定向界面像点的像方位置是否正确;–需要像点正确
B 立体环境下立体显示是否正确—需要外方位元素 kappa 正确 确保以上两项正确则保证空三成果导入正确;
在正式立体采集之前,需要立体环境下套合控制点检查空三精度;利用 inpho 做空三, 在不确定空三精度前可直接打开 DTMaster 中查看立体和控制点套合情况判断空三是否需要 再调整。
针对原始数据种类及状态不同,工程导入 mapmatrix 后需要针对性的做一些操作,主要 操作:重新输入相机文件重新数码内定向(ZI 工程一般只会读取焦距,其他信息会丢失,需 手动输入);
对影像和像点根据情况旋转; 影像外方位元素加减常数(二分之 PI 的倍数)
以下针对常见数据类型做个介绍:
大飞机影像,竖直存储
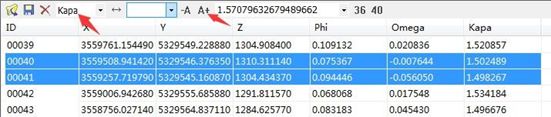
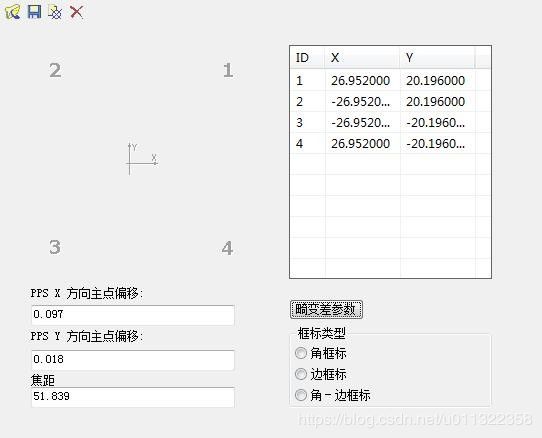
A 有主点偏移,一个相机,x 轴向下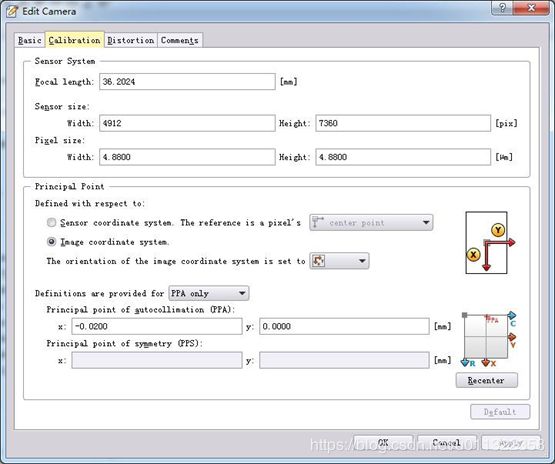 数据导入后设置相机文件,数码相机内定向(Mapmatrix 中默认相机 x 轴相机向右,不能更 改,此处需根据 inpho 中 x 轴指向与 x 轴指右的相对关系调整主点偏移值)
数据导入后设置相机文件,数码相机内定向(Mapmatrix 中默认相机 x 轴相机向右,不能更 改,此处需根据 inpho 中 x 轴指向与 x 轴指右的相对关系调整主点偏移值)
 由于有 x 轴指右向 x 轴指下的转换,像点需顺时针旋转
由于有 x 轴指右向 x 轴指下的转换,像点需顺时针旋转
 再进入相对定向界面,检查像点(与 inpho 中像点位置比较)
再进入相对定向界面,检查像点(与 inpho 中像点位置比较)

 另一种相机文件输入错误时,像点位置
另一种相机文件输入错误时,像点位置
 所有影像外方位元素 kappa 角加二分之 pi,立体正确,导入成功。
所有影像外方位元素 kappa 角加二分之 pi,立体正确,导入成功。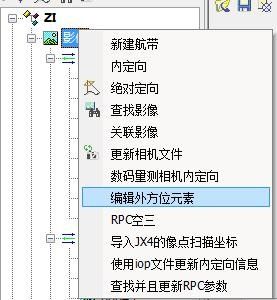
 B 有主点偏移,一个相机,x 轴向右
B 有主点偏移,一个相机,x 轴向右 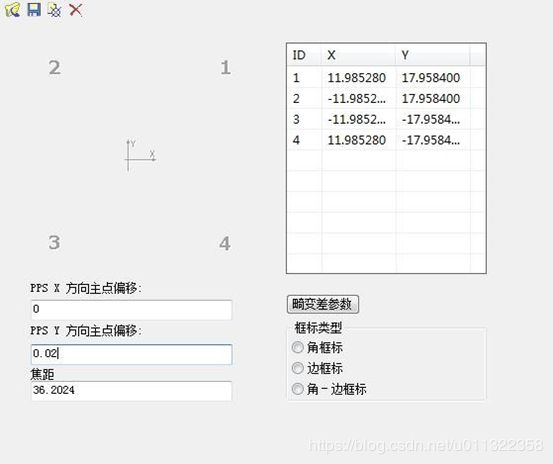
 C 有主点偏移,隔航带影像翻转:
C 有主点偏移,隔航带影像翻转:
1)有主点偏移,两个相机,x 轴向右(另一个相机 x 轴翻转 180,主点取反),严格按照相 机文件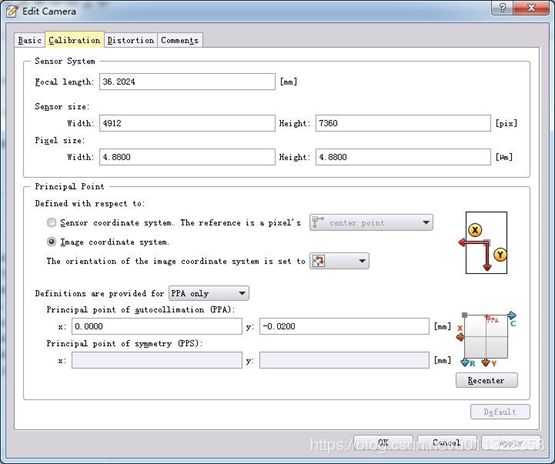
导入 Mapmatrix 后设置相机参数(Mapmatrix 中只认一个相机文件)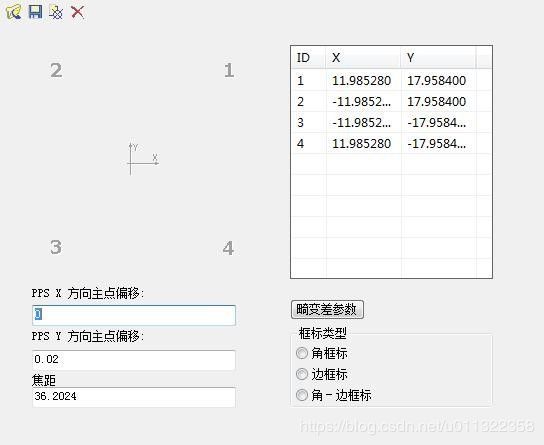 使用相机 1 的航带,不用任何调整,像点立体均正确
使用相机 1 的航带,不用任何调整,像点立体均正确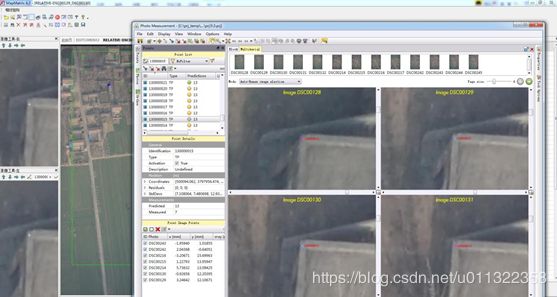 使用相机 copy1 的航带,像点立体均不对
使用相机 copy1 的航带,像点立体均不对 像点旋转 180,像点正确
像点旋转 180,像点正确 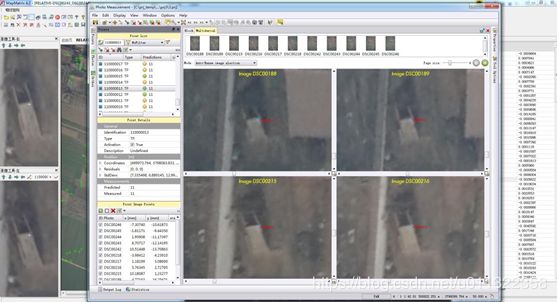 同时需要更新外方位元素,对应影像外方位元素 kappa 角加 PI,立体正确,导入成功。
同时需要更新外方位元素,对应影像外方位元素 kappa 角加 PI,立体正确,导入成功。 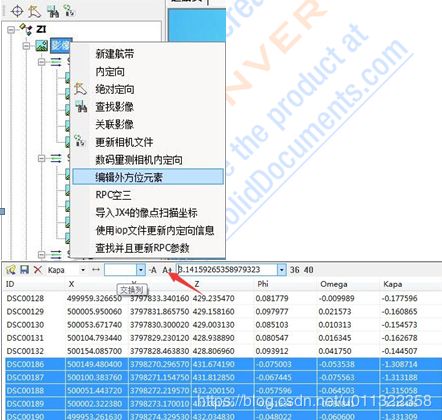
 注:
注:
1 mapmatrix 默认相机文件 x 轴向右,不能更改;inpho 内相机 x 轴可以任意设置;
Inpho 工程导入 mapmatrix 中,首先要根据两个软件内 x 轴指向的设置,做主点偏移及像点 的转换;
2 mapmatrix 不支持多相机文件工程(焦距、主点、畸变参数任意一项不同,因影像翻转指 定新相机文件不算)
3 如果对空三中间过程没有严格要求,大飞机影像空三时可以直接忽略主点偏移,对于需要 翻转的工程,建 2 个相机文件(其中一个 x 轴取反方向)、直接物理需旋转影像或者对应需 翻转影像 kappa 角加 180 均可
无人机影像
A 没有畸变参数,利用 inpho 检教相机(包含主点偏移,畸变参数)
 如果 inpho 内 x 轴不是向右,此处 x0y0 需要根据两个坐标系旋转;k123 对应远景 k357,取 反;p 参数直接对应。
如果 inpho 内 x 轴不是向右,此处 x0y0 需要根据两个坐标系旋转;k123 对应远景 k357,取 反;p 参数直接对应。
同时像点及外方位元素参照以上规律作调整。
B 包含畸变参数,先用插件去畸变,使用无畸变参数影像做空三处理,导入 MM 后影像和 像点根据实际情况做旋转即可
6 Match_at 之影像命令器相关
Inpho 处理影像是基于影像各级金字塔,从连接点匹配、dem 自动生成到正射影像相关运算; 在 image commander 中调出金字塔生成窗口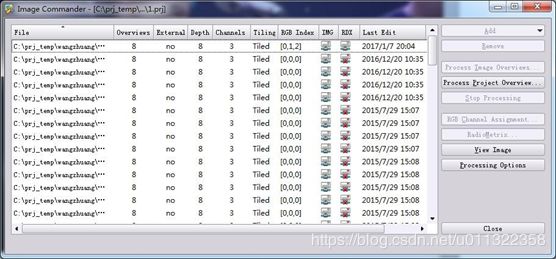 金字塔种类分为两种:tiled 和 scanline;
金字塔种类分为两种:tiled 和 scanline;
Scanline 类金字塔对应影像外部金字塔,生成.pyr 格式金字塔文件;按行形式存储影像信息;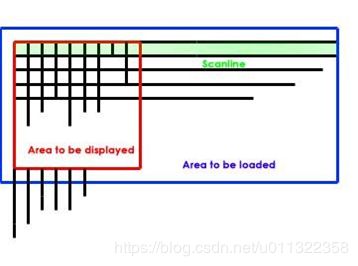 tiled 类金字塔对应为影像内部金字塔,金字塔信息写在影像内部;影像数据量增大 1/3 左右; 按块形式存储影像形式;减少影像读取时间,推荐使用
tiled 类金字塔对应为影像内部金字塔,金字塔信息写在影像内部;影像数据量增大 1/3 左右; 按块形式存储影像形式;减少影像读取时间,推荐使用 Overviews 指金字塔级别,影像框幅越大,金字塔级别越高; 通过如下窗口生成金字塔:
Overviews 指金字塔级别,影像框幅越大,金字塔级别越高; 通过如下窗口生成金字塔: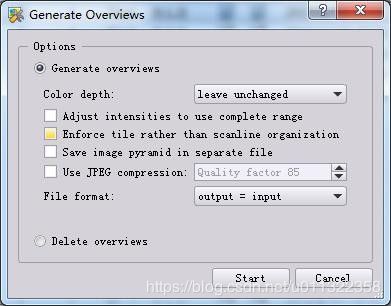 注:在使用内部金字塔的情况下,inpho 空三成果导入三方软件进行 DLG 采集时,要使用上 述工具删除金字塔,否则在影像显示的时候会有黑边。
注:在使用内部金字塔的情况下,inpho 空三成果导入三方软件进行 DLG 采集时,要使用上 述工具删除金字塔,否则在影像显示的时候会有黑边。
7 inpho 中支持相机检校
inpho 中支持相机检校,检校方式分为两种,可以在 inblock 中进行检校,也可以在 postprocessing 中进行检校。如果要得到相对可靠的检校参数,需要自由网的结果和控制 点的数量满足生产要求。
方法一:在 inblock 中进行相机检校
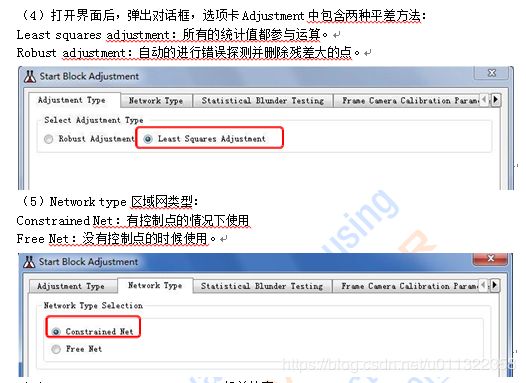
(1)在 inblock 中进行相机检校的步骤为:
在主界面中 products-inblock-calibration,打开相机检校模块。
 Thorough blunder checking :此种方法处理较大的粗差值,同时探测粗差值,在平差 中将粗差大的点降低权重。但是花费的时间比较长。
Thorough blunder checking :此种方法处理较大的粗差值,同时探测粗差值,在平差 中将粗差大的点降低权重。但是花费的时间比较长。
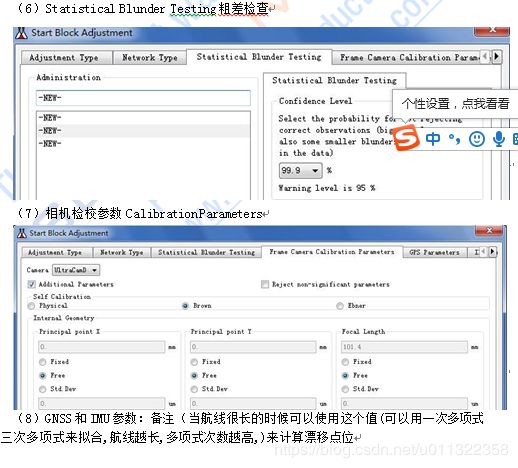
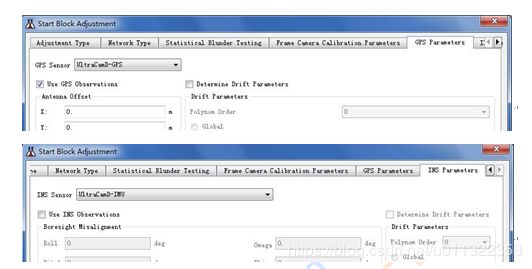 (Calibration Parameters,GPS 和 IMU)设置,当有足够控制点的情况下可以用来把 一些参数设置为 free,来让软件自动定位参数和输入的值来做比对,从而来确定误差的所在。
(Calibration Parameters,GPS 和 IMU)设置,当有足够控制点的情况下可以用来把 一些参数设置为 free,来让软件自动定位参数和输入的值来做比对,从而来确定误差的所在。
Inblock 计 算 完 相 机 检 校 参 数 后 , 会 在 工 程 中 形 成 一 个 新 的 相 机 文 件 cam-calibration.prj。打开相机文件,在 distortion 中显示此次相机检校的参数。需要注 意的是,inpho 中检校出来的相机参数与国内常用的检校参数存在一些符号差异。在利用 inpho 的检校参数进行影响去畸变时,要进行相应的修改。
如:由于 Lensdistortion 的计算公式与 inpho 的计算公式存在差异,在 Lensdistortion 中进行畸变纠正时,将 K1,K2,K3 值的正负号求反(例:inpho 反算出来的 K1=-4.0204E-005, 则在 Lensdistortion 中输入时,K1=4.0204E-005),P1、P2 值不变。
 方法二:在 inpho 的 postprocessing 中也可以进行相机检校。
方法二:在 inpho 的 postprocessing 中也可以进行相机检校。
方法二:在 inpho 的 postprocessing 中也可以进行相机检校。  此种方式对于生产 dom 结果来说,可直接将检校相机参数应用到空三结果中,保证 dom 生产的精度要求。不过检校出来的是一个 grid 的畸变参数,对于要进行测图处理的数据, 这种 grid 参数无法在通用插件中进行影像的畸变。
此种方式对于生产 dom 结果来说,可直接将检校相机参数应用到空三结果中,保证 dom 生产的精度要求。不过检校出来的是一个 grid 的畸变参数,对于要进行测图处理的数据, 这种 grid 参数无法在通用插件中进行影像的畸变。
8 match_at 之相机检教相关 如果工程平差以后检查连接点分布正常、影像
连接度正常、控制点分布正常、控制点刺
点位置没有问题,却发现连接点位置正确但单点残差比较大且残差值连续下降、sigma 值偏 大且无法降低、相机畸变分布矢量显示不正常、控制点残差超限调不下来,就需要考虑相机 文件是否准确以及相机自检校。
1
 勾选以后重新进行平差后处理即可(postprocessing)
勾选以后重新进行平差后处理即可(postprocessing)
2 使用相机自检校模块



 自检校后会在建立工程界面相机栏中生成新的相机文件并指定
自检校后会在建立工程界面相机栏中生成新的相机文件并指定
match_at 之三方成果导入相关
三方软件的空三成果导入 inpho 后可直接进行 dem、dom 生成;以 patb 格式空三成果 为例介绍导入过程
新建工程完毕以后导入影像,import 选项下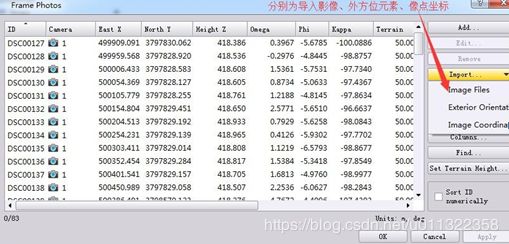
 也可以导入像点坐标
也可以导入像点坐标 空三成果导入后,进入到 PMT 界面检查连接点是否为同名点
空三成果导入后,进入到 PMT 界面检查连接点是否为同名点
9 match_at 之连接点匹配问题
连接点匹配数量与质量确定了区域网平差的相对精度;
根据原始 pos 精度以及影像像幅,匹配连接点大致分为以下三种情况: 1 大像幅专业量测相机数据(非高精度差分 pos) ,匹配和平差均不勾选 Use GNSS 和
1 大像幅专业量测相机数据(非高精度差分 pos) ,匹配和平差均不勾选 Use GNSS 和
Use IMU
2 中小像幅相机数据(非高精度差分 pos),匹配勾选 Use GNSS 不勾选 Use IMU,平差 时两者都不勾选
3 带高精度差分 pos 的数据,匹配和平差时 Use GNSS 和 Use IMU 都勾选

通过修改上述参数可改变连接点匹配效果外,还可以从如下方面找原因:
1 相机文件 —相机文件不准确会造成整体中误差大于半个像素甚至匹配失败;可重新 检教相机文件或者使用 inpho 的相机自检校功能
2 pos 文件精度—由于 inpho 基于金字塔边匹配边平差,原始 pos 精度越高,匹配效果 越好;在原始 pos 精度不好的情况下可对其精度进行修正再匹配,达到更好的匹配效果:
a 无人机数据可用快拼软件预处理后用精化 pos 再匹配;如果是规律性的 pos 偏差也可 手动修改
b 可先添加连接点或者控制点后引导匹配 c 利用计算过的外方位元素进行二次匹配 d 地形高差大的位置添加 DTM 辅助匹配
10 match_at 之控制点权重设置
在连接点匹配完毕,且数量及分布能够满足连接点分布基本要求后,需要进行添加控
制点进行绝对定向。 像方中误差一般设置为 1/2 像素以内 控制点权重设置:
 1 在导入控制点的时候,控制点权重可以默认设置:
1 在导入控制点的时候,控制点权重可以默认设置:
OBJECT(X/Y) = 1/3x pixel size x image scale= 1/3*GSD 此数值代表工程能够达到的最高精度情况下的设置方法:手工刺点的最高精度为 1/3 像素(人 眼对像素最高分辨率在 1/3 像素左右),才能保证最后工程能满足的精度就是单个像素代表 的地面大小,即 GSD
2 传统空三软件 patb,控制点权重设置方法:
patb 中设置是根据工程要求精度设置控制点权重,一般按照 1/3 工程精度设置为控制点权重 设置最终值
注:因为 inpho 自由网匹配后得到的连接点成果相对关系强,且准确率较高,需要控制点具 有高权重在整体平差的时候才能对自由网进行控制,否则会出现平差以后控制点被当成粗差 的情况;推荐按照的错误结果
11 match_at 之精度检查相关
空三精度检查包括几个方面:
match_at 之精度检查相关
1 连接点均匀分布与整个测区,保证影像间左右、上下相对关系有很好的连接度;控制点按 照规范要求布设
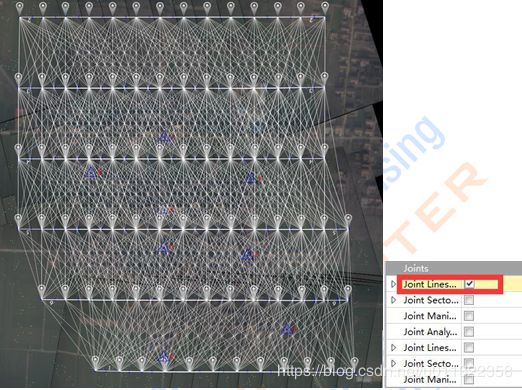 连接线表示了影像之间有连接点,如果有空洞表示此区域缺点
连接线表示了影像之间有连接点,如果有空洞表示此区域缺点 连接线表示连接点与影像间的连接,如果有空洞表示航带间缺点 以上情况需要补点,至少保证连接点的最低分布要求
连接线表示连接点与影像间的连接,如果有空洞表示航带间缺点 以上情况需要补点,至少保证连接点的最低分布要求
2 平差结果可视化显示,正常情况下影像标准差测区周边影像会较测区中心区偏大,若中心 区影像标准差突变说明此处精度异常,需检查

 正常情况相机畸变分布总体来看,方向无序周边数字略大(箭头长度)
正常情况相机畸变分布总体来看,方向无序周边数字略大(箭头长度) 5 利用平差工具中的计算控制点模型差,有针对性的调整控制点
5 利用平差工具中的计算控制点模型差,有针对性的调整控制点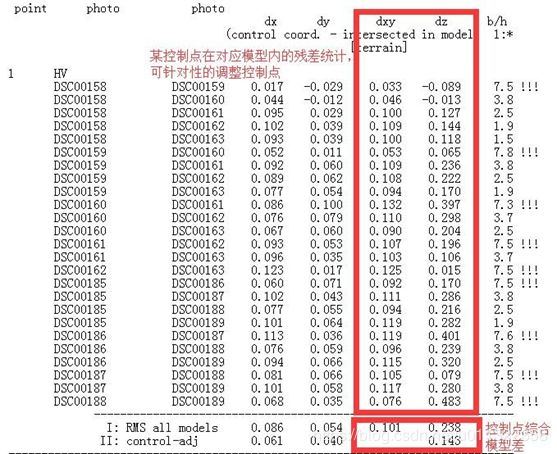 5 在 dtmaster 或者其他三方软件中恢复立体,套合控制点检查精度
5 在 dtmaster 或者其他三方软件中恢复立体,套合控制点检查精度