IOU & GIOU & DIOU 介绍及其代码实现
IOU & GIOU & DIOU 介绍及其代码实现
微信公众号:幼儿园的学霸
个人的学习笔记,关于OpenCV,关于机器学习, …。问题或建议,请公众号留言;
从IOU,到GIOU,然后到最近的DIOU、CIOU。
目录
文章目录
- IOU & GIOU & DIOU 介绍及其代码实现
- 目录
- IOU
- 介绍
- 计算代码
- GIOU
- 介绍
- 代码
- DIOU
- 介绍
- 代码
- CIOU
- 介绍
- DIOU CIOU结果分析
- 代码
- 总结
- 参考资料
IOU
介绍
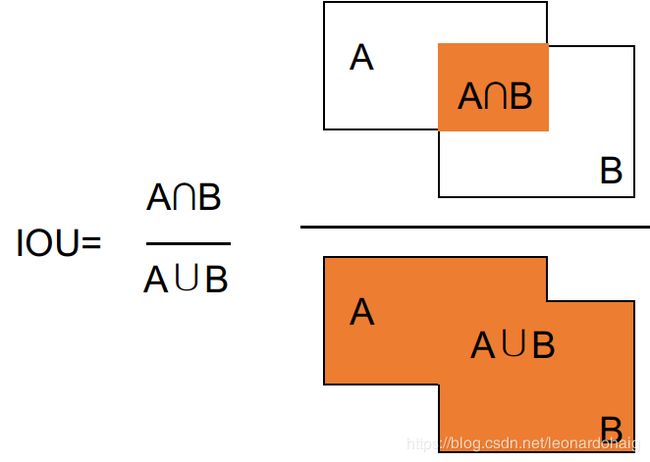
IoU 的全称为交并比(Intersection over Union),通过这个名称我们大概可以猜到 IoU 的计算方法。IoU 计算的是 “预测的边框” 和 “真实的边框” 的交集和并集的比值。计算过程如下:
IOU的优点:
- IOU可以作为距离,loss=1-IOU。但是当两个物体不相交时无回传梯度。
- IOU对尺度变化具有不变性,即不受两个物体尺度大小的影响。
以A,B两个box重合的情况为例,若boxes1=[[0,0,10,10],[0,0,5,5]],boxes2=[[0,0,10,10],[0,0,5,5]],此时IOU=[1,1]
IOU的缺点: - 无法衡量两框是相邻还是甚远
如下图2所示,两种情况下IOU均为0,(a)中两框距离较近,(b)中两框明显距离要远,但是仅从IOU数值上无法判断两者距离较近还是较远(两个物体不相交时无回传梯度) - IOU不能反映两个物体如何重叠(相交方式)。
如下图3所示,两种情况下的IOU均为0.1428,(a)中两框要比(b)中的相交更整齐一些,但是IOU并没有反映出这个特点。
计算代码
def bboxes_iou(boxes1,boxes2):
'''
cal IOU of two boxes or batch boxes
such as: (1)
boxes1 = np.asarray([[0,0,5,5],[0,0,10,10],[0,0,10,10]])
boxes2 = np.asarray([[0,0,5,5]])
and res is [1. 0.25 0.25]
(2)
boxes1 = np.asarray([[0,0,5,5],[0,0,10,10],[0,0,10,10]])
boxes2 = np.asarray([[0,0,5,5],[0,0,10,10],[0,0,10,10]])
and res is [1. 1. 1.]
:param boxes1:[xmin,ymin,xmax,ymax] or
[[xmin,ymin,xmax,ymax],[xmin,ymin,xmax,ymax],...]
:param boxes2:[xmin,ymin,xmax,ymax]
:return:
'''
#cal the box's area of boxes1 and boxess
boxes1Area = (boxes1[...,2]-boxes1[...,0])*(boxes1[...,3]-boxes1[...,1])
boxes2Area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
#cal Intersection
left_up = np.maximum(boxes1[...,:2],boxes2[...,:2])
right_down = np.minimum(boxes1[...,2:],boxes2[...,2:])
inter_section = np.maximum(right_down-left_up,0.0)
inter_area = inter_section[...,0] * inter_section[...,1]
union_area = boxes1Area+boxes2Area-inter_area
ious = np.maximum(1.0*inter_area/union_area,np.finfo(np.float32).eps)
return ious
GIOU
介绍
GIOU是为克服IOU的缺点同时充分利用优点而提出的.(论文:Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression)
GIOU计算公式:
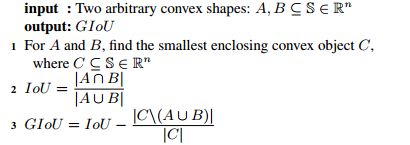
可以这样理解:
1.假设A为预测框,B为真实框,S是所有框的集合
2.不管A与B是否相交,C是包含A与B的最小框(包含A与B的最小凸闭合框),C也属于S集合
3.首先计算IoU,A与B的交并比
4.再计算C框中没有A与B的面积,比上C框面积;
5.IoU减去前面算出的比;得到GIoU
6.Note:本文提出的例子中A、B均是矩形框,但是也可以为其他的。比如:A、B为椭圆形,那么此时C将是包含A、B的最小椭圆形;或者A、B均是3D box也可。
过程如下图5所示:
论文作者给出几个GIoU的性质:
- 对尺度的不变性
- GIoU可认为是IoU的下界,小于等于IoU
如boxes1=[0,0,10,10],boxes2=[0,0,10,10],此时IOU=1,GIOU=1,这种情况下A与B重合
boxes1=[0,0,10,10],boxes2=[0,10,10,20],此时IOU=0,GIOU=0
boxes1=[0,0,10,10],boxes2=[5,5,15,15],此时IOU=0.1428,GIOU=-0.07936 -1<=GIoU<=1,当A=B时,GIoU=IoU=1;当A与B不相交而且离得很远时,GIoU(A,B)趋向于-1。
如boxes1=[[10,10,15,15],[100,100,105,105]],boxes2=[5,5,10,10],计算的GIOU为[-0.5,-0.995],即A与B不相交,随着两者距离增加,GIOU值将趋向于-1,如下图6所示。- 因此选用loss=1-GIoU
- GIoU能够更好地反应相交情况。如上面图3所示,虽然两种情况下IOU一致,但是(a)中相交的更为整齐,因此GIOU要比(b)中大。
GIoU最主要的作用: (1)对于相交的框,IOU可以被反向传播,即它可以直接用作优化的目标函数。但是非相交的,梯度将会为0,无法优化。此时使用GIoU可以完全避免此问题。所以可以作为目标函数
(2)可以分辨框的对齐方式
代码
def bboxes_giou(boxes1,boxes2):
'''
cal GIOU of two boxes or batch boxes
such as: (1)
boxes1 = np.asarray([[0,0,5,5],[0,0,10,10],[15,15,25,25]])
boxes2 = np.asarray([[5,5,10,10]])
and res is [-0.49999988 0.25 -0.68749988]
(2)
boxes1 = np.asarray([[0,0,5,5],[0,0,10,10],[0,0,10,10]])
boxes2 = np.asarray([[0,0,5,5],[0,0,10,10],[0,0,10,10]])
and res is [1. 1. 1.]
:param boxes1:[xmin,ymin,xmax,ymax] or
[[xmin,ymin,xmax,ymax],[xmin,ymin,xmax,ymax],...]
:param boxes2:[xmin,ymin,xmax,ymax]
:return:
'''
# cal the box's area of boxes1 and boxess
boxes1Area = (boxes1[...,2]-boxes1[...,0])*(boxes1[...,3]-boxes1[...,1])
boxes2Area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
# ===========cal IOU=============#
#cal Intersection
left_up = np.maximum(boxes1[...,:2],boxes2[...,:2])
right_down = np.minimum(boxes1[...,2:],boxes2[...,2:])
inter_section = np.maximum(right_down-left_up,0.0)
inter_area = inter_section[...,0] * inter_section[...,1]
union_area = boxes1Area+boxes2Area-inter_area
ious = np.maximum(1.0*inter_area/union_area,np.finfo(np.float32).eps)
# ===========cal enclose area for GIOU=============#
enclose_left_up = np.minimum(boxes1[..., :2], boxes2[..., :2])
enclose_right_down = np.maximum(boxes1[..., 2:], boxes2[..., 2:])
enclose = np.maximum(enclose_right_down - enclose_left_up, 0.0)
enclose_area = enclose[..., 0] * enclose[..., 1]
# cal GIOU
gious = ious - 1.0 * (enclose_area - union_area) / enclose_area
return gious
DIOU
介绍
由于IOU Loss在候选框和真实框没有重叠的时候不提供任何移动梯度(LIoU=1-IOU始终为1),于是GIOU Loss引入了一个惩罚项(即图5中的(C-A并B)/C)。由于惩罚项的引入,在不重叠的情况下,预测框会向目标框移动。
但是考虑如下图图7情况。
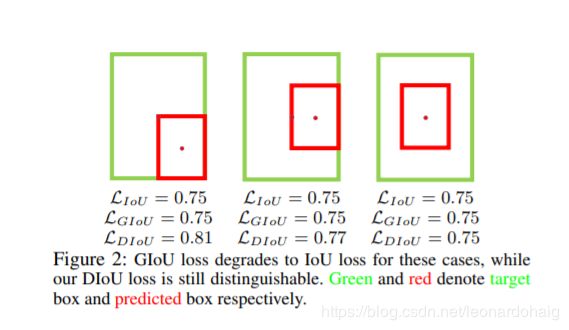
当出现上图情况时,GIoU Loss完全降级成IoU Loss,因此引入DIoU Loss
,DIoU Loss是在IoU Loss基础上引入一个惩罚项,定义如下:

上述损失函数中,b,bgt分别代表了anchor框和目标框的中心点,且p代表的是计算两个中心点间的欧式距离。c代表的是能够同时覆盖anchor和目标框的最小矩形的对角线距离。因此DIoU中对anchor框和目标框之间的归一化距离进行了建模。直观的展示如下图所示。

DIoU的优点如下:
1.与GIoU loss类似,DIoU loss在与目标框不重叠时,仍然可以为边界框提供移动方向。
2.DIoU loss可以直接最小化两个目标框的距离,而GIOU loss优化的是两个目标框之间的面积,因此比GIoU loss收敛快得多。
3.对于包含两个框在水平方向和垂直方向上这种情况,DIoU损失可以使回归非常快,而GIoU损失几乎退化为IoU损失
代码
def bboxes_diou(boxes1,boxes2):
'''
cal DIOU of two boxes or batch boxes
:param boxes1:[xmin,ymin,xmax,ymax] or
[[xmin,ymin,xmax,ymax],[xmin,ymin,xmax,ymax],...]
:param boxes2:[xmin,ymin,xmax,ymax]
:return:
'''
#cal the box's area of boxes1 and boxess
boxes1Area = (boxes1[...,2]-boxes1[...,0])*(boxes1[...,3]-boxes1[...,1])
boxes2Area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
#cal Intersection
left_up = np.maximum(boxes1[...,:2],boxes2[...,:2])
right_down = np.minimum(boxes1[...,2:],boxes2[...,2:])
inter_section = np.maximum(right_down-left_up,0.0)
inter_area = inter_section[...,0] * inter_section[...,1]
union_area = boxes1Area+boxes2Area-inter_area
ious = np.maximum(1.0*inter_area/union_area,np.finfo(np.float32).eps)
#cal outer boxes
outer_left_up = np.minimum(boxes1[..., :2], boxes2[..., :2])
outer_right_down = np.maximum(boxes1[..., 2:], boxes2[..., 2:])
outer = np.maximum(outer_right_down - outer_left_up, 0.0)
outer_diagonal_line = np.square(outer[...,0]) + np.square(outer[...,1])
#cal center distance
boxes1_center = (boxes1[..., :2] + boxes1[...,2:]) * 0.5
boxes2_center = (boxes2[..., :2] + boxes2[...,2:]) * 0.5
center_dis = np.square(boxes1_center[...,0]-boxes2_center[...,0]) +\
np.square(boxes1_center[...,1]-boxes2_center[...,1])
#cal diou
dious = ious - center_dis / outer_diagonal_line
return dious
CIOU
介绍
一个好的目标框回归损失应该考虑三个重要的几何因素:重叠面积、中心点距离、长宽比。
GIoU:为了归一化坐标尺度,利用IoU,并初步解决IoU为零的情况。
DIoU:DIoU损失同时考虑了边界框的重叠面积和中心点距离。
然而,anchor框和目标框之间的长宽比的一致性也是极其重要的。基于此,论文作者提出了Complete-IoU Loss。
CIOU Loss又引入一个box长宽比的惩罚项,该Loss考虑了box的长宽比,定义如下:

上述损失函数中,CIoU比DIoU多出了α和v这两个参数。其中α是用于平衡比例的参数。v用来衡量anchor框和目标框之间的比例一致性。
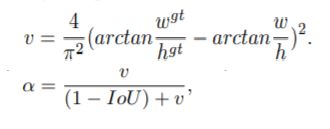
从α参数的定义可以看出,损失函数会更加倾向于往重叠区域增多方向优化,尤其是IoU为零的时候。
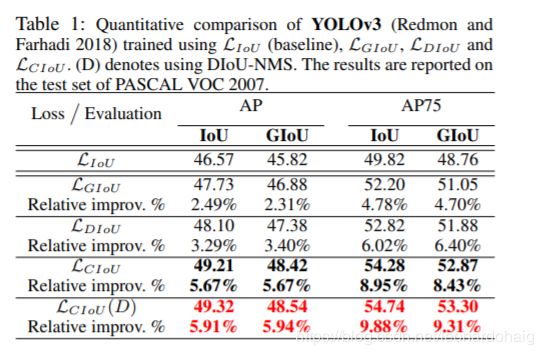
DIOU CIOU结果分析
代码
关于惩罚项的计算,我是按照论文中公式来编写的。不过可能与这个文章中代码 的计算不一样,有待分析差别。
def bboxes_ciou(boxes1,boxes2):
'''
cal CIOU of two boxes or batch boxes
:param boxes1:[xmin,ymin,xmax,ymax] or
[[xmin,ymin,xmax,ymax],[xmin,ymin,xmax,ymax],...]
:param boxes2:[xmin,ymin,xmax,ymax]
:return:
'''
#cal the box's area of boxes1 and boxess
boxes1Area = (boxes1[...,2]-boxes1[...,0])*(boxes1[...,3]-boxes1[...,1])
boxes2Area = (boxes2[..., 2] - boxes2[..., 0]) * (boxes2[..., 3] - boxes2[..., 1])
# cal Intersection
left_up = np.maximum(boxes1[...,:2],boxes2[...,:2])
right_down = np.minimum(boxes1[...,2:],boxes2[...,2:])
inter_section = np.maximum(right_down-left_up,0.0)
inter_area = inter_section[...,0] * inter_section[...,1]
union_area = boxes1Area+boxes2Area-inter_area
ious = np.maximum(1.0*inter_area/union_area,np.finfo(np.float32).eps)
# cal outer boxes
outer_left_up = np.minimum(boxes1[..., :2], boxes2[..., :2])
outer_right_down = np.maximum(boxes1[..., 2:], boxes2[..., 2:])
outer = np.maximum(outer_right_down - outer_left_up, 0.0)
outer_diagonal_line = np.square(outer[...,0]) + np.square(outer[...,1])
# cal center distance
boxes1_center = (boxes1[..., :2] + boxes1[...,2:]) * 0.5
boxes2_center = (boxes2[..., :2] + boxes2[...,2:]) * 0.5
center_dis = np.square(boxes1_center[...,0]-boxes2_center[...,0]) +\
np.square(boxes1_center[...,1]-boxes2_center[...,1])
# cal penalty term
# cal width,height
boxes1_size = np.maximum(boxes1[...,2:]-boxes1[...,:2],0.0)
boxes2_size = np.maximum(boxes2[..., 2:] - boxes2[..., :2], 0.0)
v = (4.0/np.square(np.pi)) * np.square((
np.arctan((boxes1_size[...,0]/boxes1_size[...,1])) -
np.arctan((boxes2_size[..., 0] / boxes2_size[..., 1])) ))
alpha = v / (1-ious+v)
#cal ciou
cious = ious - (center_dis / outer_diagonal_line + alpha*v)
return cious
总结
DIoU要比GIou更加符合目标框回归的机制,将目标与anchor之间的距离,重叠率以及尺度都考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。
参考资料
1.论文笔记:GIoU
2.目标检测------CVPR2019------对GIOU的认识
3.【论文阅读】Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
4.论文地址
5.DIoU YOLOv3 | AAAI 2020:更加稳定有效的目标框回归损失
下面的是我的公众号二维码图片,欢迎关注。
