【Addicted TO ROS】ROS中的通信架构与通讯方式
ROS中的通信架构与通讯方式
- 关于PR2
- 通讯架构
- node(节点)
- 启动node
- master(节点管理器)——控制中心
- 启动master
- roslaunch
- *.launch文件书写规则
- 通讯方式
- Topic(话题)
- 概述
- 常用命令
- `topic`内容的数据类型——Message(消息)
- 概要
- 常用命令
- Service(服务)
- 概要
- Topic VS Service
- `Service`通信的数据格式——srv
- Parameter Service(参数服务器)
- 概要
- 使用`rosparam`进行参数的读写
- 使用`.lauch`文件进行参数的读写
- Action
- Action通信的数据格式——action
- action文件
关于PR2

百度百科:
PR2 (Personal Robot 2, 个人机器人2)是威楼加拉吉生产的机器人。它的前身是斯坦福研究生埃里克·伯格和基南·威罗拜克开发的PR1机器人。PR2价格高昂,2011年零售价高达40万美元。PR2现主要用于研究。
PR2有两条手臂,每条手臂七个关节,手臂末端是一个可以张合的钳子。PR2依靠底部的四个轮子移动。在PR2的头部,胸部,肘部,钳子上安装有高分辨率摄像头,激光测距仪,惯性测量单元,触觉传感器等丰富的传感设备。在PR2的底部有两台8核的电脑作为机器人各硬件的控制和通讯中枢。两台电脑安装有Ubuntu和ROS。
依靠强大的ROS平台,PR2已能够独立完成多种复杂的任务。到如今,PR2能够自己开门,找到插头并给自己充电,能打开冰箱取出啤酒,能打简单的台球等等。
由于PR2价格高昂而且能力还达不到商业应用的要求,如今PR2主要用于研究。到2010年底,仅斯坦福,麻省理工学院,卡内基梅隆大学等美国少数大学和一些研究机构拥有PR2。
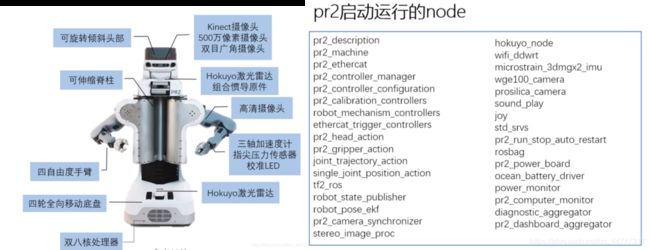
对于PR2这种众多功能模块集成的机器人怎么实现各个模块之间的通信呢?怎么实现到一些复杂的动作的呢?这就用到强大的ROS系统;ROS产生于PR2,同时ROS使PR2更加强大~
通讯架构
node(节点)
- ROS的进程、独立运行的可执行文件
- pkg里的可执行文件运行的实例
- 不同的节点可以使用不同的编程语言,可以分布在不同的主机上
- 节点在系统中的名称必须是唯一的
例如PR2这种众多功能模块集成的机器人,每个功能模块都是一个node,因此ROS的节点都是一功能来划分的,不同的功能用不同的node来实现;
启动node
- 启动node
rosrun [node_name]
- 列出当前运行的node信息
rosnode list
- 显示某个node的详细信息
rosnode info [node_name]
- 结束某个node
rosnode kill [node_name]
master(节点管理器)——控制中心
作用:
- 每个node(节点)启动时都要向master注册,即master为节点提供名和注册服务
- 管理node(节点)之间的通信;
- 跟踪结合记录话题、服务通信,辅助节点相互查找、建立连接;
- 提供参数服务器,节点使用此服务器存储和检索运行时的参数;

因此在我们启动ROS程序之前,第一步就是启动master;
启动master

roslaunch
当我们需要同时启动多个节点,需不需要多次在终端启动node呢?显然没有必要,ros给我们提供了roslaunch命令;
- 启动多个master和多个node
roslaunch [pkg_name] [file_name.launch]
如下图所示:launch文件的位置在包下面的launch文件里,*.launch文件已经配置好了用户的启动规则,执行launch文件就可以启动相关的master和node;

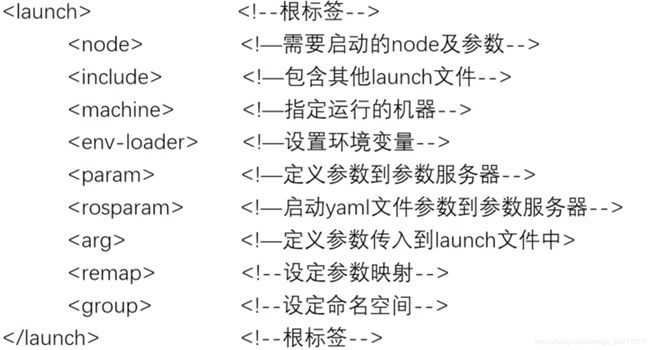
*.launch文件书写规则
通讯方式
Topic(话题)
概述
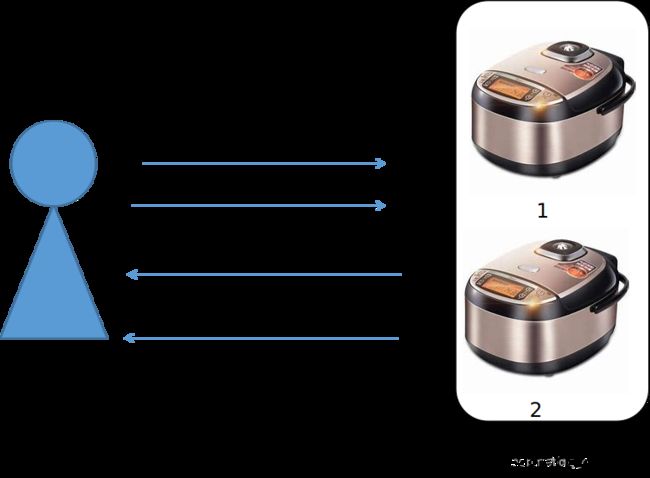
ROS中的一部通信方式,节点间通过publish-subscrible机制通信来传输数据的重要总线;publish-subscrible机制中,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一;
节点A通过在/Topic上发布消息,节点B通过在相应的/Topic订阅消息,进而实现通信;

话题的发布与订阅是一种异步的通讯方式:即发布者无需关注是否有人订阅消息,无需等待消息返回的状态;且订阅者,有自己订阅的消息则去处理,没有则去处理其他事情;
一个/Topic可以被多个node订阅;
常用命令
- 列出当前所有
topic
rostopic lsit
- 显示某个
topic的属性信息
rostopic info /topic_name
- 显示某个
topic的内容
rostopic echo /topic_name
- 向某个
topic发布内容
rostopic pub /topic_name ...
topic内容的数据类型——Message(消息)
消息(msg): msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。
概要
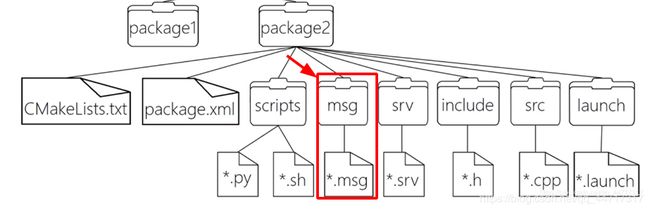
topic内容的数据类型(格式标准,相当于类)包括ROS提供的标准类型和用户自定义类型- 定义在
*.msg文件中,编译过程中会生成对应的代码文件(msg文件存放在package的msg目录下,srv文件则存放在srv目录下。)
结合面向对象的相关知识,可以做一个简单的类比,这里的message文件相当于是类,类是一种标准和规范,当我们引用这个message(比如publish)的时候,我们相当于new对象,显然,对象必须遵守累的规范;
msg文件实际上就是每行声明一个数据类型和变量名。可以使用的数据类型如下:
int8, int16, int32, int64 (plus uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] # 可变长数组
fixed-length array[C] #固定长数组
msg在 ROS中有一个特殊的数据类型:Header,它含有时间戳和坐标系信息。在msg文件的第一行经常可以看到Header header的声明。
下面是一个msg文件的样例,它使用了Header,string,和其他另外两个消息类型。
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
常用命令
- 列出系统上所有
msg
rosmsg list
- 显示某个
msg内容
rosmsg show /msg_name
Service(服务)
概要
ROS中的同步通信方式Node间可以通过request-reply方式通信,客户端发送请求数据,服务器完成处理后返回应答数据;
服务的请求与响应是一种同步的通讯方式:当Client发完一个请求之后,Node A会进入阻塞状态,直到服务器返回一个reply之后,Node A才会继续执行;

Topic VS Service
| Topic | Service | |
|---|---|---|
| 通信方式 | 异步通讯 | 同步通讯 |
| 实现原理 | TCP/IP |
TCP/IP |
| 通信模式 | Publish-Subscrible |
Request-Reply |
| 节点关系 | Publisher-Subscribler(多对多) |
Client-Server(多对一) |
接收者收到的数据回调(Callback) |
远程过程调用(PCR)服务器端的服务 |
|
| 应用场景 | 连续、高频的数据分布 | 偶尔调用的功能/具体的任务 |
| 举例 | 激光雷达、里程计发布数据 | 开关传感器、拍照、逆解计算 |
Service通信的数据格式——srv
Service通信的数据格式- 定义在
*.srv文件中
srv文件分为请求和响应两部分,由---分隔。下面是srv的一个样例:
int64 A
int64 B
---
int64 Sum
其中A 和 B是请求, 而Sum是响应。
Parameter Service(参数服务器)
概要
- 存储各种参数的字典
- 适合存储静态、非二进制的配置参数,不适合存储动态配置的数据;
- 读写灵活,可用命令行,
launch文件和node(API)读写
参数服务器是可通过网络API访问的共享的多变量字典(字典:即指key、value对,就是一种映射关系)。节点在运行时使用此服务器存储和检索参数。由于它不是为高性能而设计的,因此最适合用于静态,非二进制数据,例如配置参数。它意味着可以全局查看,以便工具可以轻松检查系统的配置状态并在必要时进行修改。
参数服务器使用XMLRPC实现,并在ROS Master内部运行,这意味着可以通过常规XMLRPC库访问其API。
使用rosparam进行参数的读写
- 列出当前所有参数
rosparam list
- 显示某个参数的值
rosparam get param_key
- 设置某个参数的值
rosparam set param_key parm_value
- 保存参数到文件
rosparam dump file_name
- 从文件读取参数
rosparam load file_name
- 删除参数参数
rosparam delete param_key
使用.lauch文件进行参数的读写
<lauch>
<param>param>
<rosparam>rosparam>
lauch>
Action
- 类似于
Service,带有状态反馈的通信方式 - 通常用在长时间、可抢占的任务中

- 类比:
Action通信的数据格式——action
action通信的数据格式- 定义在
*.action文件中
action文件
行为规范使用.action文件。.action文件有目标定义,然后是结果定义,然后是反馈定义,每个部分用3个连字符(—)分隔。
这些文件被放置在包的./action目录,看起来非常类似于服务.srv文件。一个行为规划的摆放可能看起来如下:
./action/DoDishes.action
# 定义目标goal
uint32 dishwasher_id # Specify which dishwasher we want to use
---
# Define the result
uint32 total_dishes_cleaned
---
# Define a feedback message
float32 percent_complete
在这个.action的基础上,需要生成6个消息,以便客户端和服务器进行通信。这一代可以在制作过程中自动触发;