微分几何I
微分几何I——度量、标架
在Guass 关于内蕴几何研究的启发下,Riemann认识到作为几何学的基本假设,应当将拓扑性质和空间度量性质区别开来,Riemann、Levi、Civita等人在Riemann度量的发展起到重要作用,Riemann提出为每条曲线提供长度的方法,首先为流形上的切向量指定长度,然后沿着曲线积分来定义曲线长度。在Riemman几何中,Levi-Civita平行移动的概念提出对几何发展起到重要作用。它发展为后续的联络以及向量丛上的联络。
在向量空间V中,考虑函数⟨⋅,⋅⟩:V×V⟶R,如果它满足下面两个条件就称为向量V的内积
1. 对称性 :⟨u,v⟩=⟨v,u⟩,∀u,v∈V
2. 非负性:⟨u,u⟩≥0,∀u∈V,等号成立当且仅当u=0
内积的作用就是可以定义长度、角度,有了长度角度应用叉积可以定义面积,它可以把欧式空间长度推广至曲面上,接着我们可以定义RIemann度量。从Riemann 度量从发 定义联络然后是 曲率
定义:设M是m维光滑流形,g是M上的二阶协变张量场或者称(0,2)型张量场,如果g是对称,正定的,称g是M上的一个Rimann度量。指定了Riemman度量的光滑流形M,称为Riemann流形,记为(M,g),简记为M。
假设正则曲线方程为r=r(s),切向量dr的长度按内积定义
|dr|g=√⟨dr,dr⟩
有了长度在定义切向量之间的角度:
θ=arccos(⟨dr,δr⟩|dr|g⋅|δr|g)
图1 曲面参数
设曲面Σ的参数方程为r(u,v)=(x(u,v),y(u,v),z(u,v)),则坐标u,v的切向量为
∂r∂u=(∂x∂u,∂y∂u,∂z∂u),∂r∂v=(∂x∂v,∂y∂v,∂z∂v)
如果处处有∂x∂v×∂x∂v≠0,则称Σ为正则曲面。
图2 曲面参数
切向量 dr=(∂r∂udu,∂r∂vdv)=(rudu,rvdv)
法向量 n=ru×rv|ru×rv|
通过叉积使用长度、角度定义微元面积
dA=|rudu×rvdv|g=|ru|⋅|ru|sin(θ)dudv=√r2ur2v(1−cos2(θ))dudv=√r2ur2v−(ru⋅rv)2dudv=√EG−F2dudv
定义第一基本形式:
I=d{\bf r^2}\\={\langle d{\bf r},d{\bf r}\rangle}={\langle( {\bf r}_udu+{\bf r}_vdv), ({\bf r}_udu+{\bf r}_vdv)\rangle} \\={{\bf r}_u \cdot {\bf r}_ududu+2 {\bf r}_u \cdot {\bf r}_v dudv+{\bf r}_v \cdot {\bf r}_vdvdv}\\=Edu^2+2Fdudv+Gdu^2
这是一个关于du,dv的二次型,整理成矩阵形式:
I= \begin{bmatrix} du & dv \\ \end{bmatrix} \cdot \begin{bmatrix}E &F \\F & G \\ \end{bmatrix} \cdot \begin{bmatrix} du \\dv\\\end{bmatrix}
记
g=\begin{bmatrix}E &F \\F & G \\ \end{bmatrix}
g称为度量矩阵。上述计算的微元面积可简化为:
dA=\sqrt {det(g)}dudv
考虑微分流形M上的两个开集A,B,如下图所示,它满足A,B相交非空,设A的局部坐标为(x,y)度量为\rho;B的局部坐标是(u,v),度量为g。它们满足坐标变换。h:(x,y) \rightarrow (u,v),相应地微分形式满足变换:
\begin{bmatrix} du \\dv\\\end{bmatrix}=\begin{bmatrix}u_x &u_y \\v_x & v_y \\ \end{bmatrix} \cdot \begin{bmatrix} dx \\dy\\\end{bmatrix}
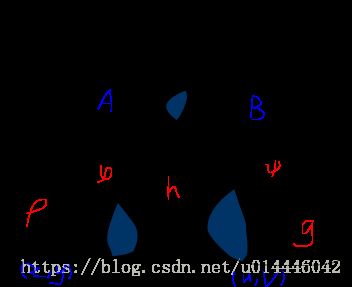
图3 流形M上的坐标变换
在 A 与 B 相交的区域,它的基本形式I不依赖于坐标选取,所以有:
\begin{bmatrix} dx & dy\\\end{bmatrix}\cdot\rho \cdot \begin{bmatrix} dx \\dy\\\end{bmatrix}=\begin{bmatrix} du & dv\\\end{bmatrix}\cdot g \cdot \begin{bmatrix} du \\dv\\\end{bmatrix}
进一步把微分形式变换带入就有:
\begin{bmatrix} dx & dy\\\end{bmatrix}\cdot\rho \cdot \begin{bmatrix} dx \\dy\\\end{bmatrix}=\begin{bmatrix} dx & dy\\\end{bmatrix}\cdot \begin{bmatrix}u_x &u_y \\v_x & v_y \\ \end{bmatrix} ^T \cdot g \cdot \begin{bmatrix}u_x &u_y \\v_x & v_y \\ \end{bmatrix}\cdot \begin{bmatrix} dx \\dy\\\end{bmatrix}
所以 \rho= \begin{bmatrix}u_x &u_y \\v_x & v_y \\ \end{bmatrix} ^T \cdot g \cdot \begin{bmatrix}u_x &u_y \\v_x & v_y \\ \end{bmatrix}
满足上述形式的度量称为在曲面上指定了Riemann 度量。

图4 向量内积
文中开头就介绍了内积定义,那是公理化的定义,现在考虑Riemann度量g定义的内积,假设某点的两个向量为 d{\bf r},\delta {\bf r} ,则 d{\bf r}=(dx,dy) , \delta{\bf r}=(\delta x,\delta y)
它们的内积表示为:
\langle d{\bf r},\delta {\bf r}\rangle=\begin{bmatrix} dx & dy\\\end{bmatrix}\cdot\rho \cdot \begin{bmatrix} \delta x \\\delta y\\\end{bmatrix}
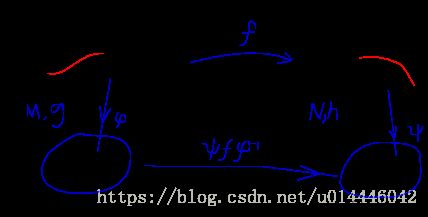
图5 拉回度量
考虑两个Riemann流形 (M,g) , (N,h) , \phi,\psi 分别表示两个流形的局部坐标, M 上的曲线通过 f 映射到 N 上,由于在 N 上有相应的度量,它可以定义 N 上的长度,这个长度然后拉回到 M 上,认为是 M 上的长度。角度也类似。如此就在原 M 上定义新的度量 f^*h ,称为拉回度量。
微分形式从M映射到N : (dx,dy)\rightarrow(du,dv) 。拉回度量的内积不变
\begin{bmatrix} dx & dy\\\end{bmatrix}\cdot f^*h \cdot \begin{bmatrix} dx \\dy\\\end{bmatrix}=\begin{bmatrix} du & dv\\\end{bmatrix}\cdot h \cdot \begin{bmatrix} du \\dv\\\end{bmatrix}
可得到 f^*h=\left(\frac{\partial (u,v)}{\partial (x,y)}\right)^T\cdot h\cdot \left(\frac{\partial (u,v)}{\partial (x,y)}\right)
如果拉回度量与原度量相等 f^*h=g ,则 f 是等距变换,若拉回度量与原度量相差一个标量函数 f^*h=e^{2 \lambda}g , \lambda:S\rightarrow\mathbb{R} 是曲面到 \mathbb{R} ,则 f 称为共形变换。
\quad\quad微分几何的出发点是微积分,一条曲线的切线和微分是同一概念,一条封闭曲线包围的面积相当于对其内部积分。微积分在几何上应用主要是曲线和曲面。首先考虑空间正则曲线\Gamma,可以认为它是曲面\Sigma上的曲线嵌入在欧式\mathbb{R^3}中,曲线参数方程r=r(s),s是其弧长参数。对参数方程求导,令{\bf T}(s)=r'(s),则{\bf T}(s)是曲线的切向量(tangent vector)。为了描述曲线的弯曲程度,常常使用曲率的概念,它是切向量对弧长的导数d{\bf T}(s)/ds,记为\kappa(s)。即:
{\kappa(s)}=\dfrac{d{\bf T}(s)}{ds}
对于单位切向量\left|{\bf T}(s)\right|=1,取平方求导可得,{\bf T'}(s){\bf T}(s)=0,由此可以得出{\bf T'}(s)与{\bf T}(s)垂直。定义{\bf T'}(s)单位向量为{\bf N}(s),它表示曲线\Gamma的主法向量。有了{\bf T}(s),{\bf N}(s)这两个向量,可以确定唯一的第2法向量,即:
{{\bf B}(s)}={\bf T}(s)\times{\bf N}(s)
这样{\{r(s),{\bf T}(s),{\bf N}(s),{\bf B}(s)}\}构成曲线r(s)的正交标架。
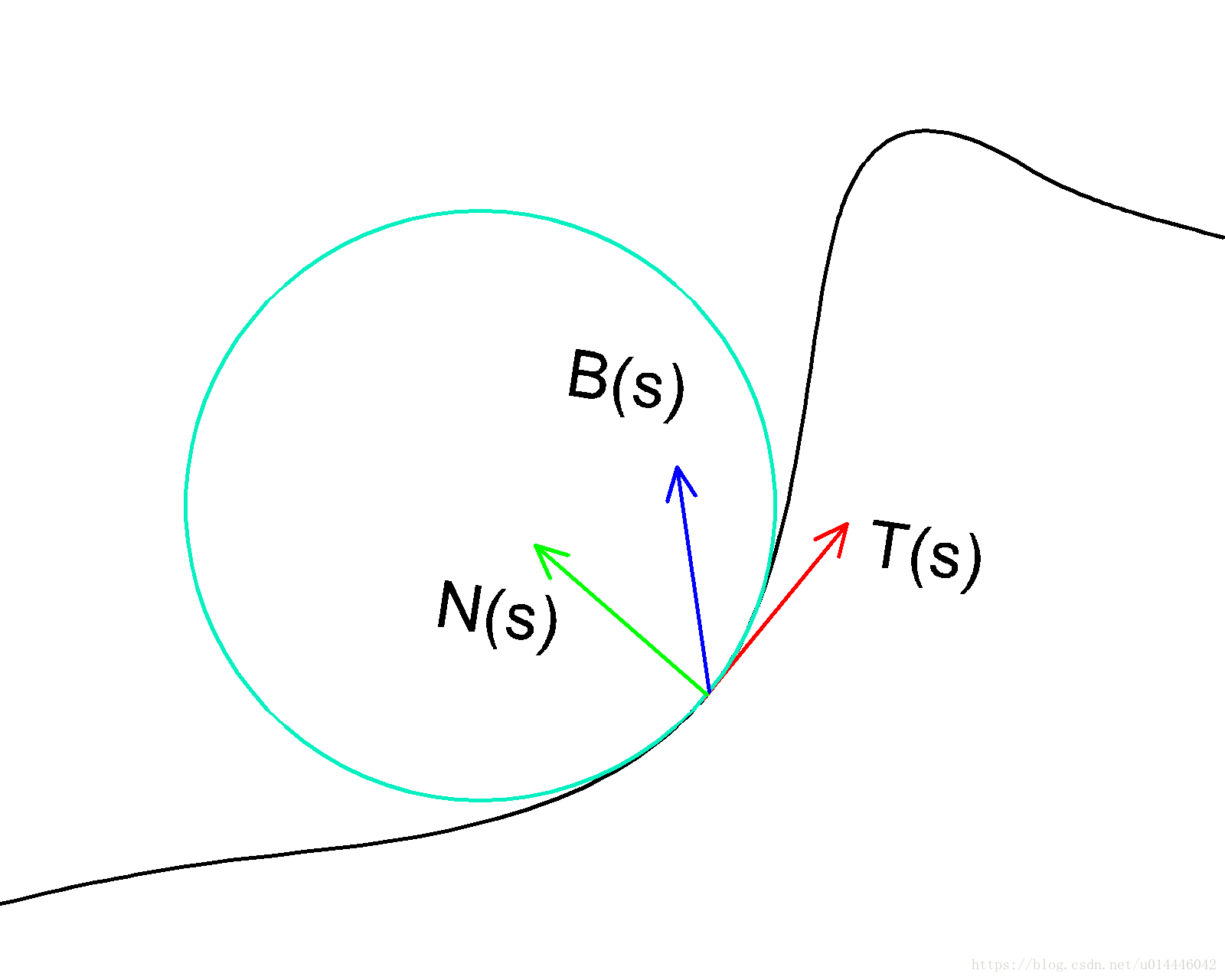
图6 曲线标架
\quad曲线在一点的切线和主法线所张的平面是曲线的密切平面,它的法向量是曲线在p点的次法向量{\bf B}。前面说过,曲线单位切向量{\bf T}关于s的导数的长度表示曲线的曲率,反映的是曲线的切线方向转动的快慢;类似的是,次法向量关于s的导数,反映出曲线的密切平面方向转动的快慢,因而它刻画了曲线偏离平面曲线的程度,即曲线的“挠率”。
由于{\{{\bf T}(s),{\bf N}(s),{\bf B}(s)}\}分别是单位切向量、单位主法向量、单位次法向量,和前面类似,
{\bf B'} \bot {\bf B},此外,{\bf B}(s)={\bf T}(s)\times{\bf N}(s),{\bf T'}(s) \parallel {\bf N}(s)
对{\bf B}(s)求导可得:
{\bf B'}(s)={\bf T'}(s)\times{\bf N}(s)+{\bf T}(s)\times{\bf N'}(s)={\bf T}(s)\times{\bf N'}(s)
所以{\bf B'} \bot {\bf T},{\bf B'}和{\bf N}共线,既然共形两者相差一个常数,不妨设{\bf B'}=- \tau(s) {\bf N}(s)
先前已有 {\bf N}(s)是单位向量,上式两边同乘以 {\bf N}(s)可得:
\tau(s)=-{\bf B'} (s){\bf N}(s)
这里插一个定义:设 {\bf N}(s)和 {\bf B}(s)分别是曲线C的主法向量和次法向量,其中s是曲线的弧长参数,则 \tau(s)=-{\bf B'} (s){\bf N}(s)称为曲线C的挠率。
有了这些曲率、挠率、标架后我们可以推出曲线运动公式
\begin{align} {\bf T}(s) & = r'(s) &\text{切向量} \tag 1\\ {\bf T'}(s) & =\kappa(s){\bf N}(s)& \text{曲率} \tag 2\\ {\bf B'}(s) & = -\tau(s){\bf N}(s) & \text{挠率} \tag 3\\ \end{align}
要使用运动公式,上述还缺{\bf N'}(s) ,由右手法则可知:
{\bf N}(s) ={\bf B}(s)\times{\bf T}(s)
两边微分:
\begin{align} {\bf N}'(s) & = B'(s) \times T(s)+B(s) \times T'(s) \tag 1\\ & = -\tau(s)N(s)\times T(s)+B(s)\times\kappa(s)N(s) \tag2 \\ & =-\tau(s)\times(-B(s))+\kappa(s)\times(-T(s)) \tag 3\\ & =\tau(s)B(s)-\kappa(s)T(s)\tag4 \end{align}
如果整理成矩阵形式:
\begin{bmatrix} {\bf T'}(s) \\ {\bf N'}(s)\\ {\bf B'}(s) \\ \end{bmatrix} = \begin{bmatrix}0 & \kappa(s) & 0 \\-\kappa(s) & 0 & \tau(s) \\0 & -\tau(s) & 0\\ \end{bmatrix} \cdot \begin{bmatrix} {\bf T}(s) \\ {\bf N}(s)\\ {\bf B}(s) \\ \end{bmatrix}
这个公式称为Frenet公式。
考虑曲面\Sigma的参数方程r(u,v),定义e_1是曲面S的单位切向量场,在切平面上将e_1逆时针旋转90^\circ 得到e_2,e_1\times e_2得到e_3向量场。\{r(u,v),e_1(u,v),e_2(u,v),e_3(u,v)\}构成曲面的局部标架场

图7 标架场
由微分1形式在切平面上分解
d\mathbb{r}=\mathbb{r}_udu+\mathbb{r}_vdv\\= (\langle\mathbb{r}_u,e_1\rangle e_1+\langle\mathbb{r}_u,e_2\rangle) e_2)du\\+(\langle\mathbb{r}_v,e_1\rangle e_1+\langle\mathbb{r}_v,e_2\rangle) e_2)dv\\= (\langle\mathbb{r}_u,e_1\rangle du+\langle\mathbb{r}_v,e_1\rangle) dv)e_1\\+ (\langle\mathbb{r}_u,e_2\rangle du+\langle\mathbb{r}_v,e_2\rangle) dv)e_2\\=\omega_1e_1+\omega_2e_2
构成微分形式分解。
同理切向量存在分解: de_i=\omega_{i1}e_1+\omega_{i2}e_2+\omega_{i3}e_3
\langle e_i,e_j\rangle=\delta^i_j \implies \langle de_i,e_j\rangle+\langle e_i,de_j\rangle=0$ \implies \omega_{ij}+\omega_{ji}=0
曲面标架运动方程:
d\mathbb{r}=\mathbb{r}_udu+\mathbb{r}_vdv=\omega_1e_1+\omega_2e_2
d \begin{bmatrix} {{\bf e}_1} \\ {\bf e}_2\\ {\bf e}_3\\ \end{bmatrix} = \begin{bmatrix}0 & \omega_{12} & \omega_{13} \\-\omega_{12} & 0 &\omega_{23} \\-\omega_{13} & -\omega_{23} & 0\\ \end{bmatrix} \cdot \begin{bmatrix} {\bf e}_1 \\ {\bf e}_2\\ {\bf e}_3 \\ \end{bmatrix}
有了微分1-形式的公式,后面的几何计算都可以采用微分形式表示,比较方便。也便于联系上同调等。
基本量用微分形式表示:
1.Riemann 度量: \langle d{\bf r},d{\bf r}\rangle=\omega_1^2+\omega_2^2
2.面元: dA_g=\omega_1 \wedge \omega_2
3.联络: \omega_{12}
联络和平行移动
联络D是为了定义曲面上的切向量的微分而出现的,它与平行移动有关,谈到平行移动首先考虑测地线上的平行移动,测地线是曲面上两点最短线,曲面S在点p处的切向量\vec v_p沿着测地线\gamma(t)平行移动满足:1.切向量\vec v_p和该点处的测地线的切向量\gamma'(0) 保持夹角不变;2.切向量\vec v_p模长不变;3.\vec v_p \in T_p^*S。对于普通曲线取曲线上的分点,在分点之间取测地线,这就是分段测地线,让分点取更细,最后取极限,即可得到平行移动。对于欧式空间的平行移动比较简单,因为测地线是线段,平行移动后向量不变,而对于曲面上的平行移动就比较复杂了。从分析上描述平行移动有利于计算,参考欧式的平行移动,曲面的平行移动可以描述为D_{\gamma'(t)}\vec v(t))=0,测地线方程可以描述为D_{\gamma(t)}\vec v(t)=0。所以有了联络就可以计算平行移动和测地线了。
定义联络D作用于函数:
D_{\vec v}f=df(\vec v)
定义联络D作用于向量:
D_{\vec v}({fe_1+ge_2})=D_{\vec v}({f})e_1+fD_{\vec v}e_1+D_{\vec v}({g})e_2+gD_{\vec v}e_2
其中:
D_{\vec v}({e_1})=\langle De_1, {\vec v}\rangle=\omega_{12}e_2
D_{\vec v}({e_2})=\langle De_2, {\vec v}\rangle=-\omega_{12}e_1
仿照曲面运动方程
D_\vec v \begin{bmatrix} {{\bf e}_1} \\ {\bf e}_2\\ {\bf e}_3\\ \end{bmatrix} = \begin{bmatrix}0 & \omega_{12} & 0 \\-\omega_{12} & 0 &0 \\0 & 0 & 0\\ \end{bmatrix} \cdot \begin{bmatrix} {\bf e}_1 \\ {\bf e}_2\\ {\bf e}_3 \\ \end{bmatrix}
有了上述公式后续的计算就可以进行了。
参考文献:
1.顾险峰,计算共形几何讲义,高等教育出版社,2008
2.陈省身,微分几何,世界图书出版公司,2006
3.陈维桓,微分几何,北京大学出版社,2006