ETH Programming for Robotics--- Introduction to ROS作业及其初学ROS心得
ROS系统很强大,学习起来坑很多,时间并不是花在写代码分析问题上面,多数时候都在baidu bug, 并莫名一脸懵逼。 经常一个bug解决完一天就过去了。所以学习ROS还是适合找几个小伙伴一起研究分享效率更高。
ETH这5次作业,看起来似乎不难,但是。。。极其费时间。打个比方,前面我在python3.6下干了很长时间,各种不匹配的出错,baidu上一个一个找权衡的办法,后来火大了,干脆装anaconda用python2.7, 然后发现,原来前面几天都做了无用功,时间都白白打了水漂。
ETH的作业有个特点,就是不是光对照教材和视频就能完成的,需要去查资料找各种细节,很多地方我是找到了相关细节的例程才知道具体怎么用的。不过做完了看着自己的无人车自己开车撞电线杆子,还是蛮有成就感的:)
关于课程主页与题目本身,在这里http://www.rsl.ethz.ch/education-students/lectures/ros.html,relay zhang老师博客https://blog.csdn.net/ZhangRelay/article/details/79463689写的也很详细,懒得打字了。具体聊几个小细节。
1. 关于画图工具与利用共享资源的意识
一个是第四题的画图,ros本身的3d建模和视觉效果非常强,但是画曲线的功能却比较弱,自带的rqt几个功能连曲线的横坐标都没得选,只能是时间。所以ETH课程推荐了multiplot package,但是坑就坑在这个包我用不了,不管上直接装binary还是build 源码,结果都是段错误,核心已转存。搜索了很久都没找到能解决的办法,后来想算了不就是画图么,我自己移植其他的画图工具包不好么?有gnuplot,有opencv, 还有Python的matplotlib,都试了一遍,但是作为初学者,对ros之外的包的融合还是不能搞定,即便把cmakelist改了还是不能正常实现,都快要放弃了突然想起来,这么重要的功能肯定其他人做过了啊,于是去github还有ros.org下面搜,一下出来好多,挑了几个发现一个plotJuggler非常好用,于是终于在这里解决了。一个教训就是,有利用已有共享资源的意识,在ros中太重要了。
2. EKF与码盘的理解
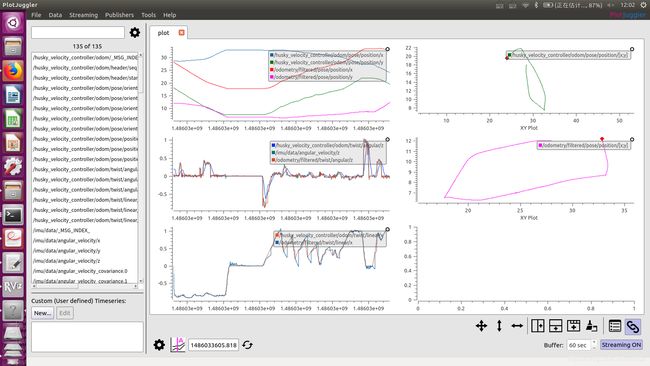
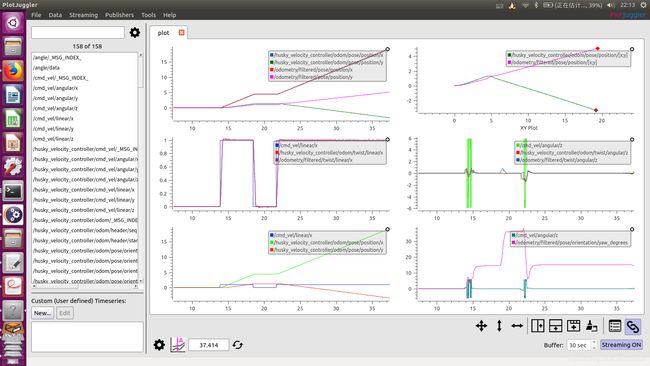
从第三题开始,题目开始引导着构建一个闭合控制回路,说实在的,题目出的好,才是我花时间做题的动力。作为一个纯控制出身的,看着车子满屏幕的跑,比整天对着的动态方程和曲线,有着不一样的兴奋,但是,新鲜过去了,只有车子没有对比曲线显然完全不能给人安全感,我连好坏都无从对比啊。于是会画图了之后,终于找到了熟悉的感觉。在画出了和视频中一样的曲线后,就是下图右下角
 我在想,这个图是ekf给出的轨迹,那准不准啊?没对比哪知道?所以有了上图其他几条曲线,也就是用码盘给出的odometry信息,和处理前的原始信息比终归没错。然而,大吃一惊的是,这差的也太远了。。。
我在想,这个图是ekf给出的轨迹,那准不准啊?没对比哪知道?所以有了上图其他几条曲线,也就是用码盘给出的odometry信息,和处理前的原始信息比终归没错。然而,大吃一惊的是,这差的也太远了。。。
然后我分析了一下,找到了ekf package的文档,然后先把配置文件localization.yaml拷贝到自己目录下,把里面初值改了,在最后加入了
initial_state: [28, 12, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0]
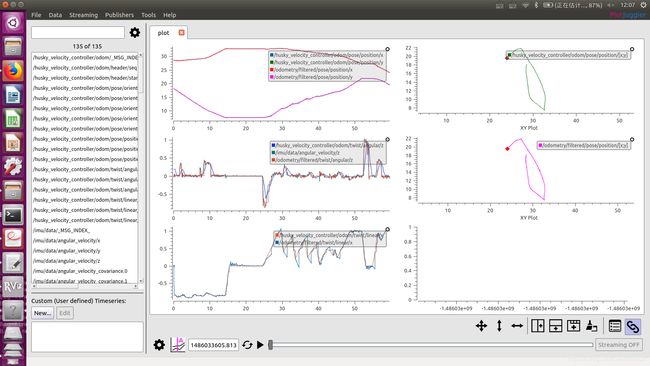
然后变成了这样
 初值对上了,然而曲线还是不对啊。事实上,我的初值显然只给了位置的初始估计,姿态的初值依然是0,所以看到的轨迹连运动大方向都对不上了。当然,如果我连姿态初值也给的差不多,那么轨迹也就大体能对上了。然而我没有这么做,因为这tm是大名鼎鼎的ekf啊,一个初值的影响都搞不定(虽然根据lindquist的理论结果,kf的初值对系统影响确实比较大,但是在初始位置都给的差不多的情况下,说初值差的远已经说不过去了),肯定其他地方出问题了。然后我看到了配置文件的其他地方:
初值对上了,然而曲线还是不对啊。事实上,我的初值显然只给了位置的初始估计,姿态的初值依然是0,所以看到的轨迹连运动大方向都对不上了。当然,如果我连姿态初值也给的差不多,那么轨迹也就大体能对上了。然而我没有这么做,因为这tm是大名鼎鼎的ekf啊,一个初值的影响都搞不定(虽然根据lindquist的理论结果,kf的初值对系统影响确实比较大,但是在初始位置都给的差不多的情况下,说初值差的远已经说不过去了),肯定其他地方出问题了。然后我看到了配置文件的其他地方:
odom0: husky_velocity_controller/odom
#odom0_config: [false, false, false, # not estimate position, noly velocity, why? of course position estimation is needed
odom0_config: [false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]
根据http://docs.ros.org/melodic/api/robot_localization/html/state_estimation_nodes.html#sensor-config,这是码盘的配置矩阵,5行分别是位置,姿态,线速度,角速度,线加速度。我注意到ekf并不使用码盘的位置信息做融合,三个值全都是false, 我想了一下我理解的ekf,从理论上我完全想不到有不用位置的理由,所以果断改掉,改成3个true ! 结果是显著的:
 这下完全吻合了。好开心, 因为我似乎通过改配置文件,把轨迹的跟踪精度大大提高了。然后我就去relay zhang老师的博客下面显摆了一下。 然而,这并不是故事的结局。。。
这下完全吻合了。好开心, 因为我似乎通过改配置文件,把轨迹的跟踪精度大大提高了。然后我就去relay zhang老师的博客下面显摆了一下。 然而,这并不是故事的结局。。。
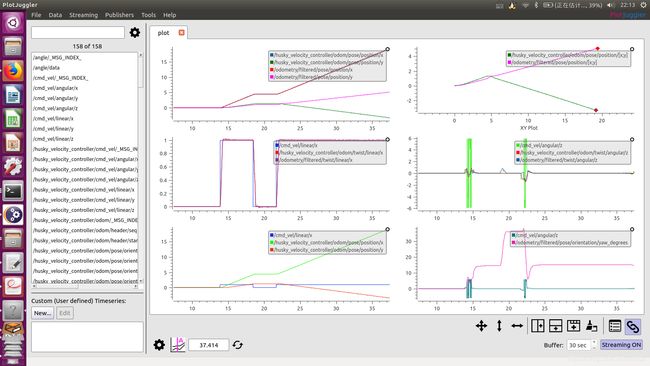
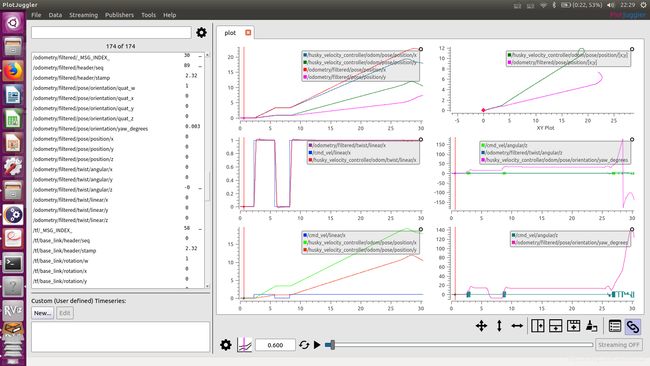
在第五题的时候,显然我做了同样的事情,这次我嫌麻烦,连配置文件都懒得拷过来,直接去husky_control pkg里面用sudo强行改了原配置文件(幸亏我有备份原文件的好习惯),一劳永逸。改完之后,小车的轨线估计(只看top两幅图就好,中左的矩形波是手动service启动停止的结果)从
 变成了
变成了
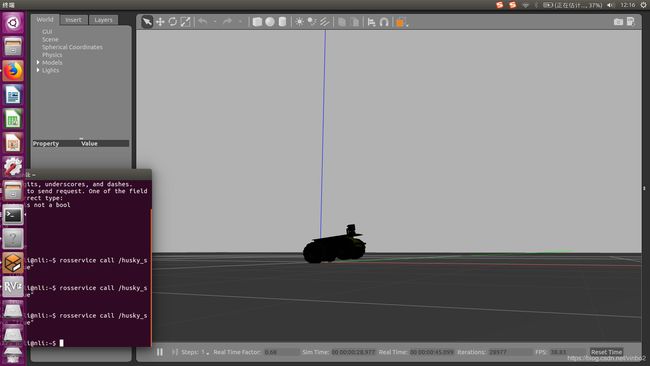
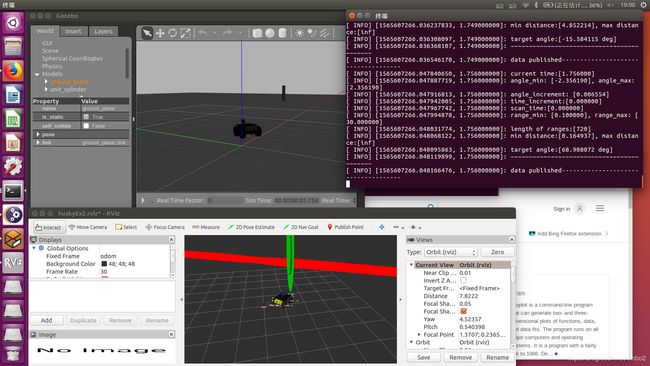
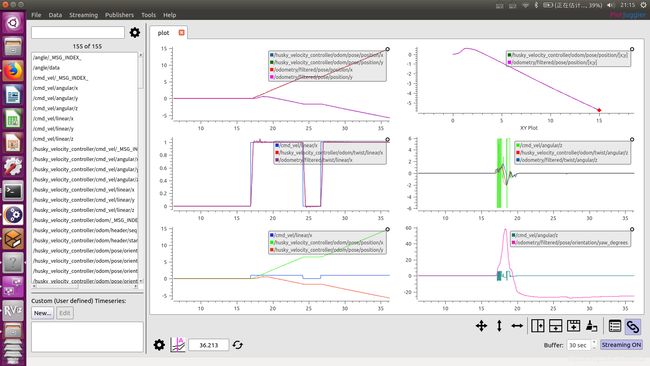 看似跟踪完美,然而,真相却是残酷的: 我的车什么时候跑到y轴负半平面去了?!!! 我的车在pid 负反馈下一直从来都是向着电线杆子走的直线啊!!!电线杆子在第一象限啊!!!有gazebo图为证:
看似跟踪完美,然而,真相却是残酷的: 我的车什么时候跑到y轴负半平面去了?!!! 我的车在pid 负反馈下一直从来都是向着电线杆子走的直线啊!!!电线杆子在第一象限啊!!!有gazebo图为证:
 这货从来一直都在走直线啊!!!我差点没崩溃了!那我的ekf估计的是啥啊。。。
这货从来一直都在走直线啊!!!我差点没崩溃了!那我的ekf估计的是啥啊。。。
反省:
经过多次仿真观察,终于有了结果。
首先,事实一:gazebo的物理模型做的太好了,对真实世界的模型远远超出了几个微分方程的刻画。在汽车启停和转弯的时候,轮胎对地面的相对摩擦,是经常发生的。甚至车子有轮胎短暂腾空的时候,这些在gazebo里面也都会发生。这些时候,码盘的读数,并不是车体的真实位移。
事实二:我在设计控制器的时候,为了夸大视觉效果,加大了控制量,比例控制系数尽量给的比较大,以至于每次车体启动,车身都会倾斜并腾空。。。出现这种情况的原因可能还有自带的速度环husky_velocity_control做的不太好,我记得好像右转的时候限制了右前轮是速度为0,所以后轮加速的情况下容易侧翻。启动侧翻图这样:(截的效果不太好)
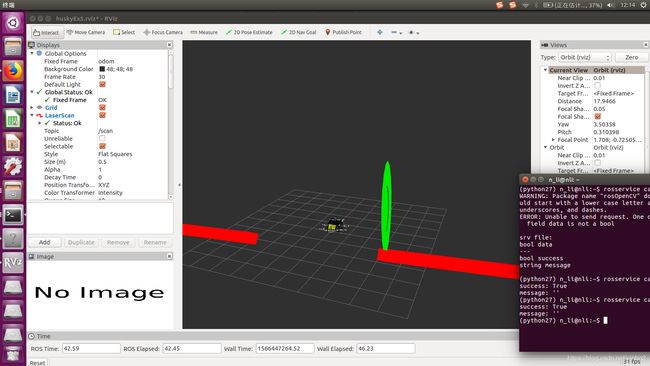
 侧翻时车体倾斜,以至于激光雷达扫到地面,并把扫到的地面最近点当成目标的rviz图:(图中红线是激光在地面扫描点,绿柱子是最近的一个点,被误认为是柱子。
侧翻时车体倾斜,以至于激光雷达扫到地面,并把扫到的地面最近点当成目标的rviz图:(图中红线是激光在地面扫描点,绿柱子是最近的一个点,被误认为是柱子。
 由于以上两点,在码盘经常与地面相对滑动时候,不要依赖码盘来读位移,才是ekf的正确使用方法!所以,码盘主要采用线速度,而陀螺仪主要采用角速度。所以husky control包既然被当成tutorial,这里的基本配置还是值得学习的。幸亏配置文件我备份了,赶紧改回去。
由于以上两点,在码盘经常与地面相对滑动时候,不要依赖码盘来读位移,才是ekf的正确使用方法!所以,码盘主要采用线速度,而陀螺仪主要采用角速度。所以husky control包既然被当成tutorial,这里的基本配置还是值得学习的。幸亏配置文件我备份了,赶紧改回去。
然后前面的正确的图我再贴一遍。。。也就是说,这个图
 或者这个图
或者这个图
才是对的,ekf给出了精确的跟踪轨迹。
然后是时候回到第四题了,第四题是直接读bag file信息,没有gazebo的物理信息,所以本质上讲无法判断真实轨迹的样子,但是上面的教训告诉我,ekf给出的信息比码盘可靠,也就是原视频的轨线结果更接近真实值。为了在rviz中直观显示出来,我自己又单独写了一个节点,功能是把ekf和码盘的给定当前坐标,作为path topic发布出去,然后在rviz里面添加topic显示就可以了(这个节点以后在其他地方也可以用),效果如下:
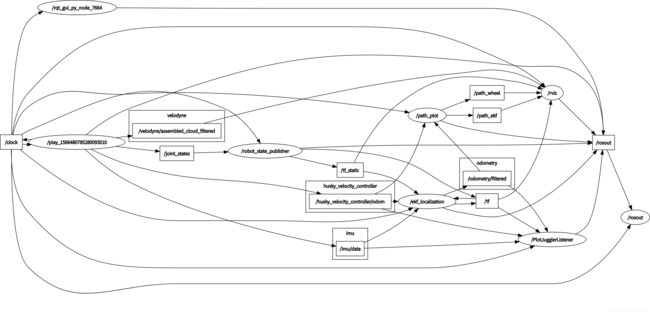
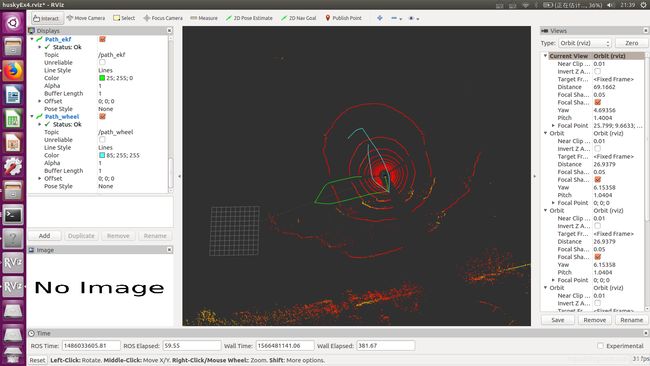 绿色的是ekf给的路径,青色的是码盘路径,显而易见rviz采用的是ekf数据来显示车体的位置,这一点从rqt graph可见:
绿色的是ekf给的路径,青色的是码盘路径,显而易见rviz采用的是ekf数据来显示车体的位置,这一点从rqt graph可见:
3. 关于倾车现象
最后稍微说一点车体倾斜和翻车现象。目前出现的情况有:加速前进,急刹车,急转弯,造成的倾斜,还有压过电线杆并翻车,还有两次一启动就翻车的情况,好像是因为比例控制参数调的太大了,并不是每次都能重现。倾斜的后果就激光雷达照到地面,以为目标在眼前或者身后,造成车头乱晃,所以我的曲线一般在启动阶段都会车头乱颤(在身后时扫描最大角度是2.35弧度,即正负135度,我设的比例控制系数是P=2.5,所以2.35*2.5=5.85,所以才有图上接近6的速度指令振荡),想消除减小控制量就好了,或者其实应该通过分析扫描到的直线判断这不是一个柱子,从而重新寻找远方的柱子。另外这台车的设计本身也由于车轮不能偏转,感觉容易倒。
终于告一个段落了,做完这几次作业,才有了ROS算基本入门的感觉。后续,有空读一下ekf的代码实现,这个代码的应用非常灵活,之前没想到有这么多自由度。另外看看机器人控制,还有导航有关的package。