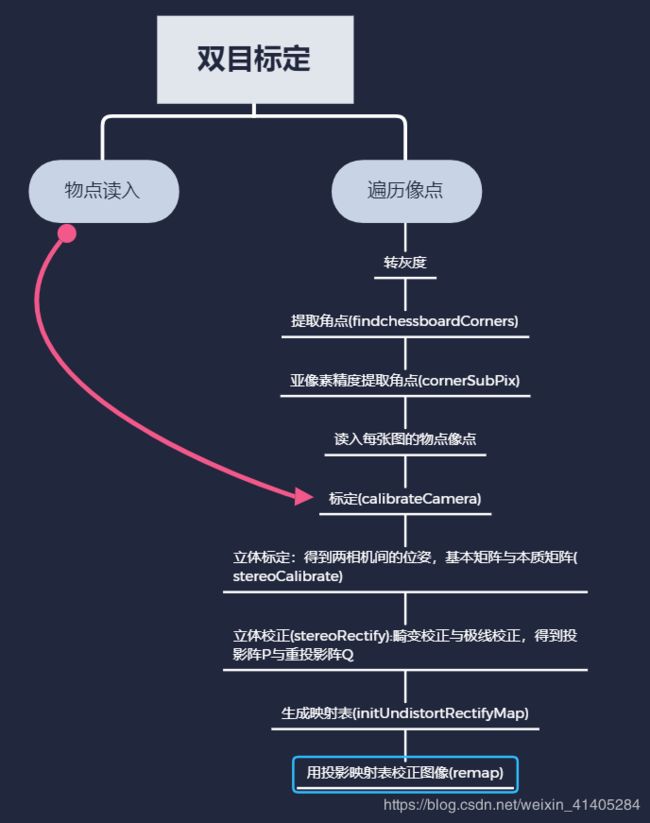
opencv双目标定+立体校正+立体匹配(源码&讲解)
//双目标定无非就是重复两次单目标定的流程,单目标定参考我上一篇博客。
//在学习双目视觉之前,建议大家补充下,双目视觉模型,对极几何的知识,今天只讲源码的流程,以后出一篇对极几何的讲解。
//老规矩先来一段源码
#include "opencv2/core.hpp"
#include //下面对源码实现流程分段讲解
//先定义一些变量,物点像点,图像路径,图像信息…
//将物点保存
for (int i = 0; i < numCornersHor; i++)
for (int j = 0; j < numCornersVer; j++)
obj.push_back(Point3f((float)j * numSquares, (float)i * numSquares, 0));
//我在遍历像点与物点的时候,出现了如下错误:
OpenCV(4.2.0) Error: Unspecified error (> Number of object and image points must be equal (expected: ‘numberOfObjectPoints == numberOfImagePoints’)
原因是:物点,与提取的数量角点不匹配,之前我将提取物点的for循环放到提取像点的for循环中,导致不匹配,
解决方法:物点与像点提取流程分开编写
//保存像点
for (int i = 0; i < 16; i++) {
printf("image file : %s \n", files_left[i].c_str());
image_l = imread(files_left[i]);
printf("image file : %s \n", files_right[i].c_str());
image_r = imread(files_right[i]);
s1 = image_l.size();
s2 = image_r.size();
cvtColor(image_l, gray_l, COLOR_BGR2GRAY);//转灰度
cvtColor(image_r, gray_r, COLOR_BGR2GRAY);//转灰度
vector<Point2f> corners_r;
vector<Point2f> corners_l;
bool ret1 = findChessboardCorners(gray_r, Size(11, 8), corners_r, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_FILTER_QUADS);//该函数的功能就是判断图像内是否包含完整的棋盘图,若能检测完全,就把他们的角点坐标(从上到下,从左到右)记录,并返回true,否则为false,CALIB_CB_FILTER_QUADS用于去除检测到的错误方块。
bool ret2 = findChessboardCorners(gray_l, Size(11, 8), corners_l, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_FILTER_QUADS);
if (ret1)
{
cornerSubPix(gray_l, corners_l, Size(11, 11), Size(-1, -1), criteria);//用于发现亚像素精度的角点位置
drawChessboardCorners(image_l, Size(11, 8), corners_l, ret1);//将每一个角点出做标记,此为物点对应的像点坐标
//imshow("calibration-demo1", image_l);
waitKey(500);
}
if (ret2)
{
cornerSubPix(gray_r, corners_r, Size(11, 11), Size(-1, -1), criteria);//用于发现亚像素精度的角点位置
drawChessboardCorners(image_r, Size(11, 8), corners_r, ret2);//将每一个角点出做标记,此为物点对应的像点坐标
//将角点坐标存入imagePoints中,此为像点坐标
//imshow("calibration-demo", image_r);
waitKey(500);
}
if (ret1&&ret2)
{
image_rightPoints.push_back(corners_r);
image_leftPoints.push_back(corners_l);//将角点坐标存入imagePoints中,此为像点坐标
objectPoints.push_back(obj);
}
}
注意· if (ret1&&ret2)
{
image_rightPoints.push_back(corners_r);
image_leftPoints.push_back(corners_l);//将角点坐标存入imagePoints中,此为像点坐标
objectPoints.push_back(obj);
}
//此处易犯错误,每写入一张图像的像点,要同时写入其物点与其对应。
///////////////////////////////////////////////////////////////////////////////////////////
//标定准备工作完成,现在开始标定
calibrateCamera(objectPoints, image_rightPoints, s2, intrinsic_right, distCoeffs_right, rvecs_r, tvecs_r);
calibrateCamera(objectPoints, image_leftPoints, s1, intrinsic_left, distCoeffs_left, rvecs_l, tvecs_l);
//标定过程结束
//立体校正的时候需要两幅图像共面且行对准,
是两幅图像共面,每个相机都需要一个旋转矩阵(Rl,Rr),
Pl,Pr为两个相机的投影矩阵,作用是将3D点的坐标转换为2D点的坐标。
//Q为重投影矩阵,矩阵Q把2D平面的点投影到3D空间
//此函数包含两步,畸变校正和极线校正。
```cpp
stereoRectify(intrinsic_left, distCoeffs_left, intrinsic_right, distCoeffs_right, s1, R_total, T_total, R_L, R_R, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, s1, &validROIL, &validROIR);
//P1,P2的前三列与内参矩阵类似

//函数输出的R,P来计算图像的映射表 mapx,mapy,给remap()调用,是两幅图像共面且行对准。
//ininUndistorRectifyMap() 的参数newCameraMatrix就是校正后的相机矩阵(内参)。投影矩阵P中包含新的相机矩阵(内参).
initUndistortRectifyMap(intrinsic_left, distCoeffs_left, R_L, P1, s1, CV_16SC2, mapLx, mapLy);
initUndistortRectifyMap(intrinsic_right, distCoeffs_right, R_R, P2, s1, CV_16SC2, mapRx, mapRy);
//映射表map输入remap()完成双目校正
printf("get map\n");
Mat rectifyImageL2, rectifyImageR2;
remap(image_l, rectifyImageL2, mapLx, mapLy, INTER_LINEAR);
remap(image_r, rectifyImageR2, mapRx, mapRy, INTER_LINEAR);
printf("rectify done\n");
//cout << "按Q2退出 ..." << endl;
imshow("rectifyImageL", rectifyImageL2);
imshow("rectifyImageR", rectifyImageR2);
waitKey(10000);
//校正效果如图
