OpenCV学习笔记(九)——Sobel边缘检测
前言:
Sobel算子是像素图像边缘检测中最重要的算子之一,在机器学习、数字媒体、计算机视觉等信息科技领域起着举足轻重的作用。在技术上,它是一个离散的一阶差分算子,用来计算图像亮度函数的一阶梯度之近似值。在图像的任何一点使用此算子,将会产生该点对应的梯度矢量或是其法矢量。
一、sobel算子的性质及构建方法
1.1 sobel算子的分离性
我们先来看一个3阶的Sobel边缘检测算子,如下所示:
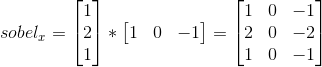

显然,3*3的Sobel算子是可分离的,它是Sobel算子的标准形式,可以利用二项式展开式的系数构建窗口更大的Sobel算子,如5*5、7*7等,但是有一点必须要注意,窗口大小要为奇数。
那么怎么来构建任意大小的sobel算子呢?
1.2 sobel算子的构建过程
Sobel算子是在一个坐标轴的方向上进行非归一化的高斯平滑,在另外一个坐标轴方向上进行差分处理,
![]() 的Sobel算子是由平滑算子和差分算子full卷积而得到的,其中
的Sobel算子是由平滑算子和差分算子full卷积而得到的,其中![]() 为奇数。对于窗口大小为
为奇数。对于窗口大小为![]() 的非归一化的
的非归一化的
Sobel平滑算子等于![]() 阶的二项式展开式的系数,那么问题只剩下怎么构建窗口大小为
阶的二项式展开式的系数,那么问题只剩下怎么构建窗口大小为![]() 的Sobel差分算子?其
的Sobel差分算子?其
实,窗口大小为![]() 的Sobel差分算子是在
的Sobel差分算子是在![]() 阶的二项式展开式的系数两侧补零,然后向后差分得到的。
阶的二项式展开式的系数两侧补零,然后向后差分得到的。
接下来我们来构建一个4阶的非均一化的Sobel平滑算子(其实就是高斯平滑算子)和Sobel差分算子,来理解整个构建过程。
第一步:取二项式的指数n=3,然后计算展开式的系数,如下所示:
![]()
也就是:
![]()
这就是4阶的非均一化的Sobel平滑算子(其实就是高斯平滑算子)。
第二步: 取二项式的指数![]() ,然后计算展开式的系数,即:
,然后计算展开式的系数,即:
![]()
也就是:
![]()
然后在两侧补零,得到:
![]()
接着后向差分(后面的数值减去前面相邻的数值),即得到差分后的结果为:
![]()
这就是4阶的Sobel差分算子。
第三步:将4阶的Sobel平滑算子(其实就是高斯平滑算子)和Sobel差分算子进行full卷积,即可得到![]() 的Sobel算子,即:
的Sobel算子,即:


Sobel平滑算子和差分算子总结如下:

二、代码实现
#include
#include
#include
using namespace cv;
using namespace std;
/*********************************************************************************************************/
/* 用sobel算子对灰度图像进行滤波 */
int factorial(int n)
{
// factorial()函数实现阶乘
int fac = 1;
if (n == 0)
{
return fac;
}
for (int i = 1; i <= n; ++i)
{
fac *= i;
}
return fac;
}
Mat getPascalSmooth(int n)
{
// getPascalSmooth()函数用来创建sobel平滑算子
Mat pascalSmooth = Mat::zeros(Size(n, 1), CV_32FC1);
for (int i = 0; i < n; ++i)
{
pascalSmooth.at(0, i) =float( factorial(n - 1) / (factorial(i)*factorial(n - 1 - i)));
}
return pascalSmooth;
}
Mat getPascalDiff(int n)
{
// getPascalDiff()函数用来创建sobel差分算子
Mat pascalDiff = Mat::zeros(Size(n, 1), CV_32FC1);
Mat pascalSmooth_previous = getPascalSmooth(n - 1);
for (int i = 0; i < n; ++i)
{
if (i == 0)
{
pascalDiff.at(0, i) = 1;
}
else if (i == n - 1)
{
pascalDiff.at(0, i) = -1;
}
else
{
pascalDiff.at(0, i) = pascalSmooth_previous.at(0, i) - pascalSmooth_previous.at(0, i - 1);
}
}
return pascalDiff;
}
void conv2D(InputArray src, InputArray kernel, OutputArray dst, int ddepth, Point anchor = Point(-1, -1), int borderType = BORDER_DEFAULT)
{
// conv2D()函数用来完成same卷积运算
Mat kernelFlip;
flip(kernel, kernelFlip, -1); // 卷积运算的第一步,将卷积核逆时针翻转180°
filter2D(src, dst, ddepth, kernelFlip, anchor, 0.0, borderType); //卷积运算的第二步
}
void sepConv2D_Y_X(InputArray src, OutputArray src_kerY_kerX, int ddepth, InputArray kernelY, InputArray kernelX, Point anchor = Point(-1, -1), int borderType = BORDER_DEFAULT)
{
// 对于可分离的离散二维卷积,先进行垂直方向上的卷积,再进行水平方向上的卷积
Mat src_kerY;
conv2D(src, kernelY, src_kerY, ddepth, anchor, borderType); // 输入矩阵与垂直方向上的卷积核的卷积
conv2D(src_kerY, kernelX, src_kerY_kerX, ddepth, anchor, borderType); // 把从上面得到的卷积结果和水平方向上的卷积核卷积
}
void sepConv2D_X_Y(InputArray src, OutputArray src_kerX_kerY, int ddepth, InputArray kernelX, InputArray kernelY, Point anchor = Point(-1, -1), int borderType = BORDER_DEFAULT)
{
// 对于可分离的离散二维卷积,先进行水平方向上的卷积,再进行垂直方向上的卷积
Mat src_kerX;
conv2D(src, kernelX, src_kerX, ddepth, anchor, borderType); // 输入矩阵与水平方向上的卷积核的卷积
conv2D(src_kerX, kernelY, src_kerX_kerY, ddepth, anchor, borderType); // 把从上面得到的卷积结果和垂直方向上的卷积核卷积
}
Mat sobel(Mat& image, int x_flag,int y_flag,int winSize, int borderType)
{
// sobel函数用来完成图像灰度矩阵与sobel核的卷积
CV_Assert(winSize >= 3 && winSize % 2 == 1); // sobel卷积核的窗口大小为大于3的奇数
Mat pascalSmooth = getPascalSmooth(winSize); // sobel平滑算子
Mat pascalDiff = getPascalSmooth(winSize); // sobel差分算子
Mat image_con_sobel; // 输出矩阵
if (x_flag != 0)
{
sepConv2D_Y_X(image, image_con_sobel, CV_32FC1, pascalSmooth.t(), pascalDiff, Point(-1, -1), borderType); //先进行一维垂直方向上的平滑,再进行一维水平方向上的差分,即图像与sobel_x进行卷积运算
}
if (x_flag == 0 && y_flag != 0)
{
sepConv2D_X_Y(image, image_con_sobel, CV_32FC1, pascalSmooth, pascalDiff.t(), Point(-1, -1), borderType); //先进行一维水平方向上的平滑,再进行一维垂直方向上的差分,即图像与sobel_y进行卷积运算
}
return image_con_sobel;
}
/********************************************************************************************************************/
// 主函数
int main( )
{
const Mat src_img = imread("test11.png");
if (src_img.empty())
{
printf("could not load image...\n");
return -1;
}
namedWindow("原图:", CV_WINDOW_AUTOSIZE);
imshow("原图:", src_img);
// 将彩色图转化为灰度图,调用OpenCV提供的cvtColor接口
Mat gray_img;
cvtColor(src_img, gray_img,CV_BGR2GRAY);
namedWindow("灰度图", CV_WINDOW_AUTOSIZE);
imshow("灰度图", gray_img);
// 用sobel算子计算度图像的水平和垂直方向上的差分
Mat image_con_sobel_Ix, image_con_sobel_Iy;
image_con_sobel_Ix = sobel(gray_img, 1, 0, 3, BORDER_DEFAULT);
image_con_sobel_Iy = sobel(gray_img, 0, 1, 3, BORDER_DEFAULT);
// 水平方向和垂直方向上的边缘强度
// 数据类型转换,边缘强度的灰度级显示
Mat scale_sobel_Ix, scale_sobel_Iy;
convertScaleAbs(image_con_sobel_Ix, scale_sobel_Ix); // 转化为8位灰度级显示
convertScaleAbs(image_con_sobel_Iy, scale_sobel_Iy);
imshow("垂直方向的边缘", scale_sobel_Ix);
imshow("水平方向的边缘", scale_sobel_Iy);
waitKey(0);
return 0;
}