机器学习——马尔可夫模型及马尔可夫决策过程(MDP)
一、马尔可夫模型
1. 马尔可夫链
设![]() 表示随机变量X在离散时间t时刻的取值。若该变量随时间变化的转移概率仅依赖于它的当前值,即:
表示随机变量X在离散时间t时刻的取值。若该变量随时间变化的转移概率仅依赖于它的当前值,即:
![]()
也就是时候状态转移概率指依赖于前一个状态,称这个变量为马尔可夫变量,其中 ![]() 为随机变量X可能的状态,这个性质称为马尔可夫性质,具有马尔可夫性质的随机过程称为马尔可夫过程。
为随机变量X可能的状态,这个性质称为马尔可夫性质,具有马尔可夫性质的随机过程称为马尔可夫过程。
马尔可夫链是满足马尔可夫性质的随机过程,指在一段时间内随机变量X的取值序列(![]() )满足上述性质
)满足上述性质
2、转移概率
马尔可夫链是通过转移概率定义的,转移概率指随机变量从一个时刻到下一个时刻,从状态![]() 转移到状态
转移到状态![]() 的概率:
的概率:
![]()
记![]() 表示变量X在时刻t的取值为
表示变量X在时刻t的取值为![]() 的概率,则随机变量X在时刻t+1的取值为
的概率,则随机变量X在时刻t+1的取值为![]() 的概率为:
的概率为:
}_i=P(X_{t+1}=s_{i}) =P(X_{t+1}=s_{i}|X_{t}=s_{0})P(X_{t}=s_{0})+P(X_{t+1}=s_{i}|X_{t}=s_{1})P(X_{t}=s_{1})+... =\sum_{k}P(X_{t+1}=s_{i}|X_{t}=s_{k})\cdot P(X_{t}=s_{k}) =\sumP_{k,i}\cdot \pi^{(t)}_{k}")
假设状态的数目为n,则:
3 马尔可夫链的平稳分布
- 1.周期性:即经过有限次的状态转移,又回到了自身
-
- 不可约:两个状态之间的转移
马尔可夫模型如下所示:
可见状态之间没有转换概率,但是隐含态和可见态之间存在一个概率叫做输出概率。
上述概率转移公式就是表示模型中状态转移的情况。
如果一个马尔可夫过程既没有周期性,又不可约,则称为各态遍历的。
对于一个各态遍历的马尔可夫过程,无论初始值![]() 取何值,随着转移次数的增多,随机变量的取值分布最终都收敛到唯一的平稳分布
取何值,随着转移次数的增多,随机变量的取值分布最终都收敛到唯一的平稳分布![]() :
:
![]()
其中![]() 为转移概率矩阵。
为转移概率矩阵。
二、隐含马尔可夫模型(HMM)
HMM是关于时序的概率模型,描述由一个隐藏的马尔可夫链生成的不客观状态随机序列,再由各个状态生成观测的随机序列的过程,如下所示:

1. HMM的定义
HMM的参数:
Q 是所有可能的状态的集合, 其中 N 是可能的状态数;
V 是所有可能的观测的集合, 其中 M 是可能的观测数;
![]()
I 是长度为 TT 的状态序列; O 是对应的观测序列:
![]()
隐马尔科夫也比马尔科夫多了一个假设,即输出仅与当前状态有关,可以用如下公式表示:
P(O1,O2,…,Ot|S1,S2,…,St)=P(O1|S1)P(O2|S2)…*P(Ot|St)
其中,O1,O2,…,Ot为从时刻1到时刻t的观测状态序列,S1,S2,…,St则为隐藏状态序列。
HMM的三要素:
HMM由初始概率分布 ππ (向量)、状态转移概率分布 A(矩阵) 以及观测概率分布 B (矩阵) 确定. π 和 A 决定状态序列, BB 决定观测序列。因此, HMM可以用三元符号表示, 称为HMM的三要素:
![]()
A是状态转移矩阵:
![]()
其中, ![]() 是在时刻 t 处于状态
是在时刻 t 处于状态 ![]() 的条件下时刻 t+1 转移到状态
的条件下时刻 t+1 转移到状态 ![]() 的概率:
的概率:
![]()
B是观测转移概率矩阵:
![]()
其中, ![]() 是在时刻 t 处于状态 qi 的条件下生成观测
是在时刻 t 处于状态 qi 的条件下生成观测 ![]() 的概率:
的概率:
![]()
π 是初始状态概率向量:
![]()
其中![]() 是时刻t=1处于状态
是时刻t=1处于状态![]() 的概率:
的概率:
![]()
HMM增加了一个假设:
齐次马尔可夫性假设 任意时刻 t 的状态, 只依赖于其前一刻的状态, 与其他时刻的状态及观测无关, 也与时刻 t 无关.
![]()
观测独立性假设 任何时刻的观测只依赖于该时刻的马尔科夫链状态. 与其他观测及状态无关.
![]()
概率计算问题:
1.计算模型λ下观测序列O出现的概率P(O|λ)
2.估计模型![]() 的参数,使得该模型下观测序列P(O|λ)最大
的参数,使得该模型下观测序列P(O|λ)最大
3.已知模型 λ=(A,B,π) , 和观测序列 O={o1,o2,⋯,oT}
求给定观测序列条件概率 P(I∣O,λ)P(I∣O,λ) 最大的状态序列![]()
2、直接计算
状态![]() 的概率
的概率
![]()
对固定的状态序列 ![]() ,观测序列
,观测序列 ![]() 的概率是:
的概率是:
![]()
O 和 I 同时出现的联合概率:
![]()
对所有可能的状态序列I求和,得到观测序列O的概率:
&=\sum_I P(O\mid I, \lambda)P(I\mid\lambda)\notag\\ &=\sum_{\underbrace{i_1,i_2, \cdots ,i_T}_{N\times N\times \cdots \times N}}\pi_{i_1}a_{i_1i_2}b_{i_1}(o_1) \cdots a_{i_{T-1}i_T}b_{i_T}(o_T),\quad\quad O(TN^T)\notag \end{align}")
此外还有前向算法,及后向算法。
参考 :https://clyyuanzi.gitbooks.io/julymlnotes/content/hmm.html
三、马尔可夫决策过程(MDP)
MDP也具有马尔可夫性,与上面不同的是,MDP考虑了动作,即系统的下个状态不仅和当前的状态有关,也与当前采取的动作有关。比如下棋,当我们在某个局面(状态s)走了一步(动作a),这是对手的选择(导致下个状态s’)我们不确定,但是他的选择只与状态s和动作a有关,而与之前的状态和动作无关。
1 、 马尔可夫决策过程
一个马尔可夫决策过程由一个四元组构成M = (S, A, Psa, R)
S: 表示状态集(states),有s∈S,si表示第i步的状态。
A:表示一组动作(actions),有a∈A,ai表示第i步的动作。
Psa: 表示状态转移概率。Psa 表示的是在当前s ∈ S状态下,经过a ∈ A作用后,会转移到的其他状态的概率分布情况。比如,在状态s下执行动作a,转移到s’的概率可以表示为p(s’|s,a)。
R: S×A⟼ℝ ,R是回报函数(reward function)。有些回报函数状态S的函数,可以简化为R: S⟼ℝ。如果一组(s,a)转移到了下个状态s’,那么回报函数可记为r(s’|s, a)。如果(s,a)对应的下个状态s’是唯一的,那么回报函数也可以记为r(s,a)。
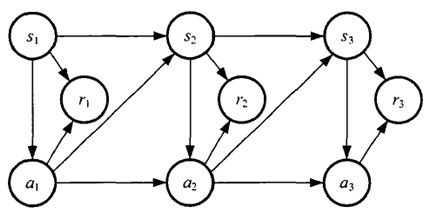
MDP 的动态过程如下:某个智能体(agent)的初始状态为s0,然后从 A 中挑选一个动作a0执行,执行后,agent 按Psa概率随机转移到了下一个s1状态,s1∈ Ps0a0。然后再执行一个动作a1,就转移到了s2,接下来再执行a2…,我们可以用下面的图表示状态转移的过程。

如果回报r是根据状态s和动作a得到的,则MDP还可以表示成下图:
2、 值函数(value function )
上篇我们提到增强学习学到的是一个从环境状态到动作的映射(即行为策略),记为策略π: S→A。而增强学习往往又具有延迟回报的特点: 如果在第n步输掉了棋,那么只有状态sn和动作an获得了立即回报r(sn,an)=-1,前面的所有状态立即回报均为0。所以对于之前的任意状态s和动作a,立即回报函数r(s,a)无法说明策略的好坏。因而需要定义值函数(value function,又叫效用函数)来表明当前状态下策略π的长期影响。
用Vπ(s)表示策略π下,状态s的值函数。ri表示未来第i步的立即回报,常见的值函数有以下三种:
 a)
a)
b)
 c)
c)
其中:
a)是采用策略π的情况下未来有限h步的期望立即回报总和;
b)是采用策略π的情况下期望的平均回报;
c)是值函数最常见的形式,式中γ∈[0,1]称为折合因子,表明了未来的回报相对于当前回报的重要程度。特别的,γ=0时,相当于只考虑立即不考虑长期回报,γ=1时,将长期回报和立即回报看得同等重要。接下来我们只讨论第三种形式,
现在将值函数的第三种形式展开,其中ri表示未来第i步回报,s’表示下一步状态,则有:

给定策略π和初始状态s,则动作a=π(s),下个时刻将以概率p(s’|s,a)转向下个状态s’,那么上式的期望可以拆开,可以重写为:
![]()
上面提到的值函数称为状态值函数(state value function),需要注意的是,在Vπ(s)中,π和初始状态s是我们给定的,而初始动作a是由策略π和状态s决定的,即a=π(s)。
定义动作值函数(action value functionQ函数)如下:
![]()
给定当前状态s和当前动作a,在未来遵循策略π,那么系统将以概率p(s’|s,a)转向下个状态s’,上式可以重写为:
![]()
在Qπ(s,a)中,不仅策略π和初始状态s是我们给定的,当前的动作a也是我们给定的,这是Qπ(s,a)和Vπ(a)的主要区别。
知道值函数的概念后,一个MDP的最优策略可以由下式表示:

即我们寻找的是在任意初始条件s下,能够最大化值函数的策略π*。
- 值函数与Q函数计算的例子
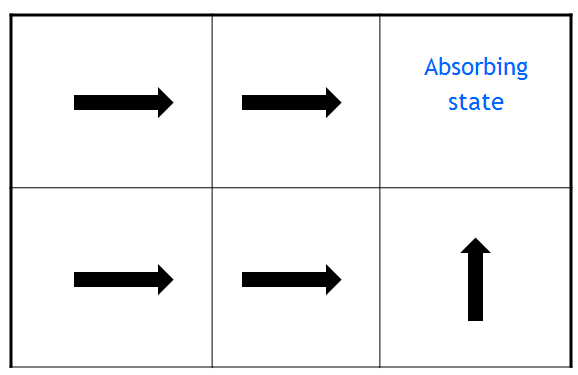
上面的概念可能描述得不够清晰,接下来我们实际计算一下,如图所示是一个格子世界,我们假设agent从左下角的start点出发,右上角为目标位置,称为吸收状态(Absorbing state),对于进入吸收态的动作,我们给予立即回报100,对其他动作则给予0回报,折合因子γ的值我们选择0.9。
为了方便描述,记第i行,第j列的状态为sij, 在每个状态,有四种上下左右四种可选的动作,分别记为au,ad,al,ar。(up,down,left,right首字母),并认为状态按动作a选择的方向转移的概率为1。

1.由于状态转移概率是1,每组(s,a)对应了唯一的s’。回报函数r(s’|s,a)可以简记为r(s,a)
如下所示,每个格子代表一个状态s,箭头则代表动作a,旁边的数字代表立即回报,可以看到只有进入目标位置的动作获得了回报100,其他动作都获得了0回报。 即r(s_12,ar_) = r(s_23,a_u) =100。

一个策略π如图所示:
值函数Vπ(s)如下所示

根据Vπ的表达式,立即回报,和策略π,有
Vπ(s12) = r(s12,ar) = r(s13|s12,ar) = 100
Vπ(s11)= r(s11,ar)+γ*Vπ(s12) = 0+0.9*100 = 90
Vπ(s23) = r(s23,au) = 100
Vπ(s22)= r(s22,ar)+γ*Vπ(s23) = 90
Vπ(s21)= r(s21,ar)+γ*Vπ(s22) = 81
- Q(s,a)值如下所示

有了策略π和立即回报函数r(s,a), Qπ(s,a)如何得到的呢?
对s11计算Q函数(用到了上面Vπ的结果)如下:
Qπ(s11,ar)=r(s11,ar)+ γ *Vπ(s12) =0+0.9*100 = 90
Qπ(s11,ad)=r(s11,ad)+ γ *Vπ(s21) = 72