MSP430F6638单片机复习笔记
作者:BerenCamlost
适应于南理工王宏波老师的《MSP430单片机》课
紧急更新!!!已完结 。求关注、收藏、点赞、评论
更新啦!还是到第七章,小更新,对部分错误做出修改,还有增加了部分重要知识点。
参考:
- MSP430数据手册
- 王宏波老师的PPT
- 王宏波老师的实验教程
- 作者之前写的MSP430笔记:MSP430单片机应用技术
第一章 绪论
1.1 单片机基础
- 全称:单片微型计算机(Single Chip MicroComputer)
- 它是把MPU、存储器、I/O口、定时器/计数器、中断系统、时钟电路、A/D-D/A等集成在一个芯片上构成的微型计算机系统。
- 单片机又称:单片微控制器、嵌入式微控制器
1.2 MSP430F663x片内资源
- MSP430F663x 系列配置有一个高性能12 位ADC、比较器、两个USCI、USB2.0、硬件乘法器、DMA、四个16 位定时器、带有报警功能的RTC、LCD 驱动器和多达74 个I/O 。
1.3 进制转换
- 【注意】小数的进制转换
1.4 原码、反码、补码的书写
- 【注意】一般是8位补码,有时也有16位补码
1.5 位操作
P1OUT|=BIT1; //P1.1置1
P1OUT|=BIT0+BIT2+BIT6+BIT7; //P1.0、 P1.2、 P1.6、 P1.7置1
P1OUT&=~BIT7; //P1.7清0
P1OUT&=~(BIT1+BIT3); //P1.3、 P1.1清0
P1OUT^=BIT0; //P1.0取反
P1OUT^= BIT0+BIT2+BIT4+BIT6; //P1.0、 P1.2、 P1.4、 P1.6取反
- MSP430的C编译器不支持位寻址,所以运算中尽量减少位操作。
第2章 硬件结构
2.1 MSP430 CPU 与 MSP430X CPU
- MSP430 CPU是指MSP430F1xx系列采用的16 位CPU,数据总线宽度16位,地址总线宽度16位,寄存器16位。寻址空间216=64KB。
- MSP430X CPU(简称CPUX)是指MSP430F2xx/4xx/5xx/6xx系列采用的CPU,数据总线宽度16位,地址总线宽度20位,寄存器20位。寻址空间220=1MB。CPUX的算术逻辑单元(ALU)也可以完成20位的计算。
- CPUX向下兼容MSP430 CPU。
2.2 PC、SP、SR
- PC:
取完指令后CPU根据该指令的字节数自动增量PC,因此20位的PC(R0)的值总是指向下一条要执行的指令。PC总是指向偶地址(bit0=0)。 - SP:
- 20位的堆栈指针,始终指向偶地址
- 【作用】:保护现场和恢复现场。
- 先进后出
- 堆栈分两种:
(1)向上增长,栈底占用较低地址,栈顶占用较高地址:8051
(2)向下增长,栈底占用较高地址,栈顶占用较低地址:MSP430、AVR
(3)ARM支持两种增长方式的堆栈。
- SR:
- 用作源或目标寄存器的16位状态寄存器(SR,也称为R2)只能用于通过字指令寻址的寄存器模式。 寻址模式的其余组合用于支持常数发生器。
- SCG1:系统时钟发生器1该位可用于根据器件系列启用或禁用时钟系统中的功能; 例如,DCO偏置启用或禁用。
- SCG0:系统时钟发生器0该位可用于根据器件系列启用或禁用时钟系统中的功能; 例如,FLL(频率锁定环)启用或禁用。
- OSCOFF:关闭振荡器。 该位置1时,当LFXT1 CLK不用于MCLK或SMCLK时,它会关闭LFXT1晶体振荡器。
- CPUOFF:CPU关闭。 该位置1时,将关闭CPU。
- CPUOFF,OSCOFF,SCGO和SCG1位请求系统进入低功耗模式。
- 【例如】:关闭和打开锁频环(FLL)
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_3; // Set RSELx for DCO = 4.9 MHz
UCSCTL2 = FLLD_1 + 74; // Set DCO Multiplier for 2.45MHz
// (FLL_N + 1) * FLLRef = FdcoCLKDIV
// (74 + 1) * 32768 = 2.45MHz
// Set FLL Div = fDCOCLK/2
__bic_SR_register(SCG0); // Enable the FLL control loop
//其中__bis_SR_register()函数是将SR寄存器中的相应位置1
//__bic_SR_register()函数是将SR寄存器中的相应位置0
2.3 三种系统复位
2.4 复位状态
- 在BOR之后,初始设备条件是:
- RST / NMI引脚配置为复位模式。
- I / O引脚切换到输入模式。
- 状态寄存器(SR)复位。
- 看门狗定时器在看门狗模式下上电。
第3章 中断、时钟与低功耗
3.1 中断
3.1.1 各种中断向量
| 中断名称(不规范) | 宏定义 |
|---|---|
| port1口中断 | PORT1_VECTOR |
| port2口中断 | PORT2_VECTOR |
| 振荡器失效中断 | 0xFFFA |
| WDT间隔定时器模式中断 | WDT_VECTOR |
| WDT看门狗模式中断 | 0xFFFE |
| TAxCCR0中断中断 | TIMER0_A0_VECTOR |
| TAIFG中断 | TIMER0_A1_VECTOR |
| ADC12中断 | ADC12_VECTOR |
| 串口中断 | USCI_A1_VECTOR |
- 【注意】排序顺序为实验顺序,不代表优先级大小
- 中断向量的计算

3.1.2 中断优先级
- 不同中断源发出的中断请求重要程度不同,每个中断源对应一个优先级,称为中断优先级。
- 【作用】:多个中断同时发生时,决定哪个中断被响应。
- 【注意】:
- 中断优先级只有在多个中断同时到来时才起作用,在中断嵌套中是不考虑的
- 中断优先级固定不变,取决于模块在中断向量表中的排序
3.1.3 中断嵌套
- CPU响应某一中断时,在开总中断的前提下若有其他中断发生,CPU将中断当前ISR,执行新的ISR。
- MSP430默认关闭中断嵌套,即进入中断服务函数后,默认关闭总中断。如果想要开启中断嵌套需要用户使用软件开启总中断。
- 开启和关闭总中断例程中最常用的方式是
__bis_SR_register(GIE); // 开启总中断
__bic_SR_register(GIE); // 关闭总中断
//其中__bis_SR_register()函数是将SR寄存器中的相应位置1
//__bic_SR_register()函数是将SR寄存器中的相应位置0
3.1.4 中断服务函数

- 如果是多元中断,可能会在终端服务函数中查看是那种中断置位,即用if或switch语句判断中断标志位是否为1.例如:
// Timer_A1 Interrupt Vector (TAIV) handler
#pragma vector=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{
switch(__even_in_range(TA0IV,14))// __even_in_range()本征函数,用于多源中断的查询。
{
case 0: break; // No interrupt
case 2: break; // CCR1 not used
case 4: break; // CCR2 not used
case 6: break; // reserved
case 8: break; // reserved
case 10: break; // reserved
case 12: break; // reserved
case 14: P4OUT ^= BIT1; // TAIFG
break;
default: break;
}
}
3.2 UCS时钟系统
3.2.1 五种时钟源和三种时钟信号
| name | function |
|---|---|
| XT1 CLK | 外部低频,一般接32768Hz |
| VLOCLK | 内部,10K振荡器 |
| REFOCLK | 内部,32768Hz |
| DCOCLK | 内部,数控振荡器,借助参考时钟 |
| XT2 CLK | 外部高频,4~32MHZ |
- 【注】DCOCLKDIV时钟为DCOCLK分频得到
| name | function | 默认 | 默认频率 | 输出方法 |
|---|---|---|---|---|
| ACLK | 用于低速外设,可由P1.0输出 | XT1CLK | 32768Hz | P1.0 |
| MCLK | 用于CPU和系统 | DCOCLKDIV | 1048576Hz | 使用__delay_cycles();和LED查看 |
| SMCLK | 用于高速外设,可由P3.4输出 | DCOCLKDIV | 1048576Hz | P3.4 |
3.2.2 FLL——锁频环
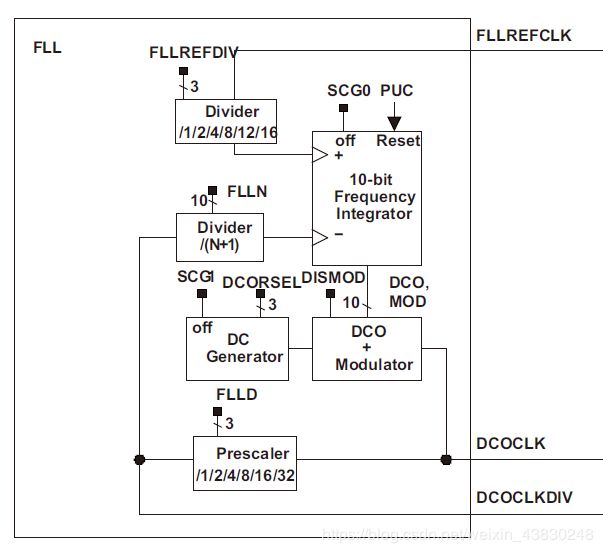
- 计算公式:fDCOCLK ÷[D × (N + 1) ] = fFLLREFCLK ÷ n
- 【注释】:
- D:FLLD,默认为2
- N:FLLN,默认为31
- n:FLLREFDIV, 默认为1
- fFLLREFCLK :FLL的参考时钟,默认为XT1CLK(32768Hz)
- 所以fDCOCLK 默认为2097152Hz,fDCOCLKDIV默认为1048576Hz
3.2.3 UCS复位之后
- 由于复位的时候XT1CLK未稳定,所以ACLK和FLL的参考时钟会自动变为REFOCLK(注意这里是REFOCLK,和后边WDT看门狗模式下的时钟故障保护功能,自动变成VLOCLK相区别)
- 根据实验情况,如果在配置ACLK和FLL之前,XT1CLK未稳定,那么时钟频率会相对变低
//稳定XT1CLK和XT2CLK的程序
//1. 解锁XT1的引脚,这是f66xx设备独有的
while(BAKCTL & LOCKBAK)// Unlock XT1 pins
{
BAKCTL &= ~(LOCKBAK);
}
//2. 设置XT2的引脚
P7SEL |= BIT2 + BIT3; // Port select XT2
//3. 开启XT1, XT2
UCSCTL6 &= ~(XT1OFF + XT2OFF); // Set XT1, XT2 On
//4. 稳定XT1CLK、XT2CLK、DCOCLK
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
//5. ACLK选择XT1CLK、SMCLK选择XT2CLK
UCSCTL4 |= SELA__XT1CLK + SELS__XT2CLK; // Select SMCLK, ACLK source
3.2.4 设置DCOCLK输出的频率范围
- 使用UCSCTL1寄存器中的DCORSEL位来设置范围
- 不用看UCSCTL0寄存器中的DCO和MOD位,单片机会自动设置
- 尽可能让输出的频率在DCORSEL控制的范围的中间位置
3.2.5 UCS模块失效安全操作
- 任何一种失效都会导致OFIFG(振荡器失效中断、非屏蔽)
- 受到OFIE使能位控制
- 振荡器关闭、打开但未正常工作时,对应振荡器失效位XT1 LFOFFG,XT1 HFOFFG, XT2OFFG置位;
- 振荡器失效位一旦置位必须用户软件清除;
- 若用户软件清除振荡器失效位后失效条件依然存在,振荡器失效位会自动置位。
- 振荡器失效事件不受GIE控制。
3.3 低功耗
| 模式 | 作用 |
|---|---|
| Active | 都可用FLL开 |
| LPM0 | ACLK、SMCLK可用 FLL开 |
| LPM3 | 仅ACLK可用(我发现这个和LPM2差不多) |
| LPM4 | 都不可用(软件关机) |
- 最常用的开启低功耗的方式
__bis_SR_register(LPM3_bits);//开启低功耗模式3
__bic_SR_register(LPM3_bits);//关闭低功耗模式3
//也可以这样:
LPM3;//开启
LPM3_EXIT;//关闭
第四章 数字I/O模块
4.1 数字I/O模块寄存器设置
| 寄存器 | 名称 | 0 | 1 | 复位值 |
|---|---|---|---|---|
| PxIN | 输入寄存器 | 输入低 | 输入高 | 不确定 |
| PxOUT | 输出寄存器 | 输出低 | 输出高 | 不确定 |
| 决定上下拉输入 | 下拉 | 上拉 | 不确定 | |
| PxDIR | 方向寄存器 | 输入(默认) | 输出 | 0 |
| PxREN | 上下拉寄存器 | 不使能 | 使能 | 0 |
| PxSEL | 引脚功能选择 | I/O功能 | 片内外设 | 0 |
- 关于PxDIR,PxREN和PxOUT在正确I / O配置中的用法
| PxDIR | PxREN | PxOUT | I / O配置 |
|---|---|---|---|
| 0 | 0 | x | 输入,无上下拉 |
| 0 | 1 | 0 | 下拉输入 |
| 0 | 1 | 1 | 上拉输入 |
| 1 | x | 0/1 | 输出0/1 |
- 对于P1,P2引脚而言,具有中断能力,利用PxIFG, PxIE,和PxIES 寄存器进行配置。
| 寄存器 | 名称 | 0 | 1 | 复位 |
|---|---|---|---|---|
| PxIFG | 中断标志位 | 无中断 | 有中断在等待 | 0 |
| PxIE | 中断使能位 | 不使能 | 使能 | 0 |
| PxIES | 中断边沿选择 | 上升沿 | 下降沿 | 不确定 |
4.2 按键
4.2.1 关于上下拉
- 对于按键必须要有上下拉,因为要有默认的输入值,不能让输入值处于浮空状态
- 可以选择内部的上下拉和外部的上下拉
- MSP430F6638具有内部上下拉,所以不一定必须使用外部上下拉
4.2.2 按键消抖
- 软件消抖:在首次检测到按键按下后,先执行一段延时子程序,然后再次确认按键是否按下,达到消抖目的。
- 硬件消抖:常用双稳态电路、单稳态电路和RC积分电路等方法。
4.3 额外的东西
对于在中断服务函数中手动清零中断标志位IFG,其实有一种更方便的方法老师没讲——PxIV,这个东西会在后边讲Timer_A中看到类似的寄存器——TAxIV
- 读/写这个寄存器都会使得正在等待处理的最高中断标志位清零
- 如果有多个中断同时到来,那么处理完最高中断后会从新开启一个中断。
第5章 看门狗WDT_A
5.1 看门狗概述
5.1.1 看门狗的作用
看门狗(Watchdog Timer-WDT)分硬件看门狗和软件看门狗,用于程序跑飞时的系统复位。
5.1.2 程序跑飞
程序跑飞不是一种硬件故障,但它会引起死机。
5.1.3 看门狗是什么
简单的说是一个定时器,从程序开始运行的时候就开始计数,当计数满的时候就会使程序复位。所以要在计满之前让看门狗定时器的数值清零,俗称喂狗。如果在计满之前看门狗没有收到喂狗信号,则认为程序已经跑飞。
5.1.4 看门狗的两种功能
- 分别是看门狗模式和间隔定时器模式
- 这两种模式使用不同的中断向量,但是都是单源中断(所以中断标志位
WDTIFG可以自动清零)- 看门狗模式的中断是系统中断
- 间隔定时器的中断是可屏蔽中断
- 看门狗和间隔定时器使用相同的中断标志位:WDTIFG
- 这两种模式不能同时使用
- 看门狗模式具有时钟故障保护功能,但是间隔定时器模式没有
5.2 看门狗的默认复位时间
WDTIS默认为4h,其时钟信号默认为SMCLK,而SMCLK的时钟源默认为DCOCLKDIV,DCOCLKDIV的频率默认为1048576Hz,所以时间间隔默认为
1 1048576 H z ÷ 2 15 = 1 32 s = 32 m s \frac{1}{1048576Hz\div 2^{15}}=\frac{1}{32}s=32ms 1048576Hz÷2151=321s=32ms
5.3 时钟故障保护
- 为保证WDT在看门狗模式下能工作,如果SMCLK或ACLK作为WDT_A时钟源发生故障,WDT将自己的时钟自动调整为VLOCLK(注意这里是VLOCLK,而不是
REFOCLK) - WDT_A提供故障安全时钟功能,确保在看门狗模式下不能禁止WDT_A的时钟。 这意味着LPM可能会受到WDT_A时钟选择的影响。
- 当WDT_A模块用于间隔定时器模式时,WDT A中没有用于时钟源的故障安全功能。
5.4 低功耗模式下的操作
用程序的要求和使用的时钟类型决定了WDT_A的配置方式。 例如,如果用户想要使用LPM3,则WDT_A不应配置为看门狗模式,其时钟源最初来自DCO,XT1为高频模式,XT2为SMCLK或ACLK。 在这种情况下,SMCLK或ACLK将保持启用状态,从而增加LPM3的当前消耗。
5.5 关闭看门狗的方法
//1. 正确的方法
WDTCTL = (WDTPW + WDTHOLD);
WDTCTL = WDTPW | WDTHOLD;
//2. 错误的方法
WDTCTL |= (WDTPW + WDTHOLD);//错误
第6章 定时器Timer_A
6.1 各种寄存器(x代表数字,比如我们用的TA1,那么x=1)
6.1.1 TAxR——16位计数器
- 16位定时器/计数器寄存器TAxR随时钟信号的每个上升沿递增或递减(取决于工作模式)。 可以使用软件读取或写入TAxR。 另外,定时器在溢出时可以产生中断。
- 可以通过将TAxCTL寄存器中的TACLR位置1来清零TAxR。 将该位置1会复位TAxR,定时器时钟分频器逻辑和计数方向。 TACLR位自动复位,始终读为0。
6.1.2 TAxCTL——时钟控制
- TASSEL——选择时钟
- MC——设置计数模式
| MC | Mode | 中文 | Description |
|---|---|---|---|
| 00 | Stop | 停止计数 | 定时器停止 |
| 01 | Up | 增计数 | 定时器重复从零计数到TAxCCR0的值 |
| 10 | Continuous | 连续计数 | 定时器重复从零到0FFFFh。 |
| 11 | Up/down | 增减计数 | 定时器重复从零开始计数到TAxCCR0的值并返回到零。 |
- TACLR——清空TAxR
- TAIE——中断使能
6.1.3 TAxCCTLn——Timer_Ax捕捉/比较控制寄存器n
捕获比较模块一共7个,n=(0~6)
- CAP——设置捕获模式/比较模式
- OUTMOD——设置输出方式(共8种)
- 第一种是电平输出,可以指定输入的电平(OUT位)
- 模式 2, 3, 6, and 7 对于 TAxCCR0 是没有用的因为 EQUx = EQU0.
- CCIE——中断使能
【注意】:这个是捕获比较的中断使能,和上面的Timer_A的中断不同。
6.1.4 TAxCCRn——捕捉/比较寄存器n
放数的
6.1.5 TAxIV——中断寄存器
- 用于查询是哪个中断到来
- 其中包含的中断事件不包括TAxCCR0中断
6.2 中断
6.2.1TAxCCR0中断
- TAxCCR0 CCIFG具有最高的Timer_A中断优先级,并具有专用中断向量(TIMER0_A0_VECTOR)。 当TAxCCR0中断请求被服务时,TAxCCR0 CCIFG自动复位。
- 这是一个单源中断
6.2.2 TAxIV中断
- TAxCCRy CCIFG和TAIFG被优先化并组合以获得单个中断向量。
(这表明其优先级可以被软件设置,这和所谓中断优先级是两个概念)这话大错特错!!优先级不能设置,写错了! - TAxIV用于确定请求中断的标志。
- 禁用Timer_A中断不会影响TAxIV值。
- TAxIV寄存器的任何访问,读取或写入都会自动重置最高的待处理中断标志。 如果设置了另一个中断标志,则在服务初始中断后立即产生另一个中断。(如果你们做过实验会发现后边的串口通信也有这个性质)
- 这是一个多源中断,但是不用手动清中断标志位
6.3 程序
6.3.1 TA0CCR0 中断
下面程序采用增计数模式,那么增加到TA0CCR0 就会产生TA0CCR0 中断,然后计数器自动清零,重新计数
- 【注意】:这是一个单源中断
#include6.3.2 TAxIV中断
下面程序,由于是连续计数模式,计数器会从0到FFFF重复计数,但是又未设置TA0CCRn的值,所以只在0FFFFh的时候才产生TAIFG这个中断,这个中断的查询在TAxIV=14的位置
- 【注意】:这是多源中断
#include第7章 模数转换器ADC12_A
7.1 概述
7.1.1 ADC12
- 这是一个12位的模拟量转换为数字量的内部外设
- 主要的过程为:
- 将模拟量通过某个单片机的引脚输入进去
- ADC读取该引脚的电压值,并根据参考电压的大小,将其转化为12位的数字量的值
- 将这个12位的数字值保存到一个12位寄存器中
- 在ADC12的中断服务函数中读取这个寄存器的值,从而进行相应的操作
7.1.2 分辨率
- 用数字量的二进制位数来表示。如12位ADC的分辨率就是12位
- 用1个LSB使输出变化的程度表示,如12位ADC的分辨率为满刻度的1/212
7.1.3 量化间隔
- 满量程输入电压/(2n-1)
- 其中n为ADC的位数,这里为12
- 满量程输入电压一般为正参考电压,即VR+
7.1.4 量化误差
是ADC的有限位数对模拟量进行量化而引起的误差,有两种计算方法:
- 绝对误差=量化间隔/2
- 相对误差=1/(2n+1)
- 这里的n还是12
7.1.5 关于参考电压的选取(REFMSTR的设置)
在REFCTL这个寄存器中有一个神奇的位叫做REFMSTR,可以通过它来设定由谁控制ADC12的参考电压。
- 当REFMSTR=1时,ADC12允许通过REFCTL寄存器控制参考系统,ADC寄存器组(ADC12REFON,ADC12REF2_5,ADC12TCOFF和ADC12REFOUT)内的原先的控制位就失去了作用,但是 ADC12SR和ADC12REFBURST仍由ADC12_A控制,因为它们非常特定于ADC12_A模块。
- 当REFMSTR=0时,ADC12的参考电压由它自己的寄存器组设置,就是上边提到的那些寄存器
7.1.6 转换的计算公式
N A D C = 4095 × V I N − V R − V R + − V R − N_{ADC}=4095\times \frac{V_{IN}-V_{R-}}{V_{R+}-V_{R-}} NADC=4095×VR+−VR−VIN−VR−
- 其中4095的由来是 2 12 − 1 = 4095 2^{12}-1=4095 212−1=4095
- 当输入电压大于正参考电压时,寄存器的值为0x0fff,当输入电压小于负参考电压时,寄存器的值为0x0000
7.2 ADC12的采样
7.2.1 SHI
- 一次AD转换由采样输入信号SHI的上升沿触发
- SHI的来源:

7.2.2 SAMPCON
- 采样控制信号SAMPCON控制采样周期和转换开始,当SAMPCON 为高时采样激活, SAMPCON 的下降沿触发模数转换。
- ADC12SHP 定义了2种采样时序(方法):
- 扩展采样模式
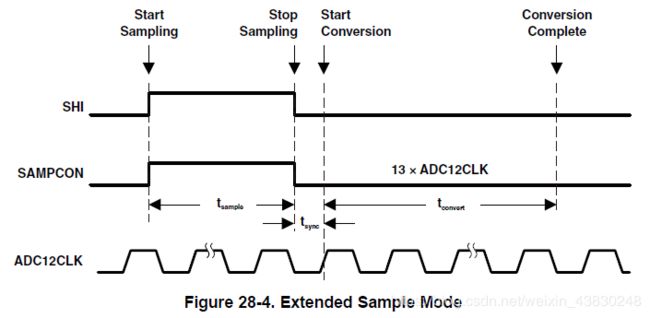
SAMPCON的长度由SHI的时间控制。即,采样输入信号SHI直接作为采样控制信号SAMPCON,决定采样的起始时刻、采样周期和转换时刻 - 脉冲采样模式
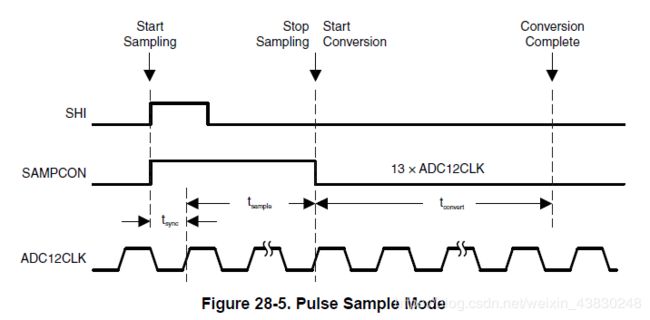
脉冲采样模式下,采样输入信号SHI仅用于触发采样,采样周期由采样定时器(ADC12SHT0x和ADC12SHT1x设置)确定
- 扩展采样模式
7.3 各种寄存器
7.3.1 ADC12CTL0
- ADC12SHT1x & ADC12SHT0x
- 用于设定采样的周期,其中
- ADC12SHT1x配置ADC12MEM8 ~ADC12MEM15寄存器的采样周期
- ADC12SHT0x配置ADC12MEM0 ~ADC12MEM7寄存器的采样周期
- ADC12REF2_5V
内部参考电压的设置 - ADC12REFON
内部参考电压开启/关闭 - ADC12ON
ADC12的开启/关闭 - ADC12ENC
ADC12_A的转换使能,这个位在配置寄存器之前应该置0,配置结束后置1 - ADC12SC
ADC12的转换开始,这个位在转换结束后会自动复位,所以在应用程序中转换结束后应该将这一位软件置1
7.3.2 ADC12CTL1
- ADC12CSTARTADDx
转换地址选择,即ADC12MEMx的选择 - ADC12SHSx
SHI信号选择 - ADC12SHP
采样模式选择(扩展采样和脉冲采样) - ADC12SSELx
ADC12CLK的选择 - ADC12CONSEQx
模式选择,一般选择单通道单次转换,即00
7.3.3 ADC12MEMx
转换出来的值存放在这里,一般在终端服务函数中查看这个寄存器。当转换结果写入选定的ADC12MEMx, ADC12IFGx中对应标志位置位;当这个寄存器的值被读取之后,IFG自动复位。
- 强调一下:转换结果写入ADC12MEMx时对应的ADC12IFGx置位,若对应的ADC12IEx 和GIE 置位,将会产生中断请求。
7.3.4 ADC12MCTLx
这里的x是由ADC12CTL1寄存器中的ADC12CSTARTADDx位确定的
- ADC12SREFx参考电压选择
- ADC12INCHx模拟量输入通道选择
7.3.5 ADC12IE
中断使能寄存器,使能哪一位也是由ADC12CTL1寄存器中的ADC12CSTARTADDx位确定的
7.3.6 ADC12IV
这个寄存器可以查看是哪个中断标志位置位,具体的代码是:
switch(__even_in_range(ADC12IV,34))// 注意这个内置函数,用于查看是哪个中断到来
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow
case 6: break;// Vector 6: ADC12IFG0
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
7.4 例程
注释都在例程里,仔细看哦~
#include 第八章 通用串行通信接口USCI
最后一章了!!!加油!!
8.1 串行通信概述
8.1.1 异步通信
发送设备、接收设备使用各自的时钟控制数据的发送和接收过程。为使双方的收发协调,要求发送和接收设备的时钟尽可能一致。
8.1.2 串行异步通信特点
- 数据按帧传输,一个数据帧包含起始位、数据位、地址
位、校验位和停止位。 - 不要求收发双方时钟的严格一致
- 依靠起始位、停止位保持帧内数据同步。
- 每个字符都要附加2~3位用于起始位和停止位,各帧之
间还有间隔,因此传输效率不高,适用于传输速度较低的
场合。
8.2 UART——通用异步收发传输器
8.2.1 如何工作?
USCI_Ax 模块通过UCAxRXD、UCAxTXD两个引脚连接外部系统。 UCSYNC位清0时,USCI模块配置为UART模式。
8.2.2 波特率
-
收发采用相同的波特率
-
波特率指的是每秒钟传输二进制代码的位数

-
UART字符格式由起始位,7或8个数据位,偶数/奇数/无奇偶校验位,地址位(地址位模式)和一个或两个停止位组成。
8.3 USCl操作
8.3.1 初始化和复位
- PUC或者置位UCSWRST后,USCI自动复位;PUC后,UCSWRST自动置位
- UCTXIFG传输中断标志位置位,其他的标志位和中断使能都清零。
- 仅可以在UCSWRST=1时配置USCI
- UCSWRST=0时,启动USCI
- 推荐的USCI配置过程如下:

8.3.2 奇偶效验位
- 奇效验:要求数据位中的1的个数和奇效验位的1的个数之和为奇数。
- 偶效验:要求数据位中的1的个数和偶效验位的1的个数之和为偶数。
- 比如:0xAA的二进制为10101010,其中“1”的个数为4个,那么奇效验位的“1”的个数应为1个,则奇效验位是1;如果是偶效验,那个偶效验位应该是0
8.3.3 发送和接受中断
- USCI收、发共用1个中断矢量。
- UCTXIFG置位表明UCAxTXBUF为空,可向其写入待发送字符,若UCTXIE 和GIE也置位,将产生发送中断请求。写UCAxTXBUF自动清除UCTXIFG。
- 每接收一个字符并将其装入UCAxRXBUF后,UCRXIFG置位,若UCRXIE和GIE也置位,将产生接收中断请求。读UCAxRXBUF自动清除UCRXIFG。
- 建议在这两个中断中只是用一个,不然有可能出现问题。。。
- 使用UCAxIV寄存器看是哪个中断到来
8.4 波特率的产生
产生波特率有两种模式,低频波特率产生模式和过采样波特率产生模式,通过设置UCOS16位进行选择。
8.4.1 关于波特率
- 波特率指的是每秒钟传输二进制代码的位数
- 波特率最大是有限制的。
- 在每个波特率的周期中,采样三次,采用投票法选取。
8.4.1 低频模式(UCOS16=0)
- 波特率最大不能超过BRCLK(USCI时钟)的1/3
- 波特率发生器使用一个预分频器和一个二级调制器产生位时钟BITCLK ,实现小数分频。
- 三次采样发生在N/2-1/2、N/2和N/2+1/2 BRCLK处,此处N为每个位时钟BITCLK周期内时钟源BRCLK周期的个数。
8.4.2 过采样模式(UCOS16=1)
- 在此模式下,USCI的最大波特率是UART源时钟频率BRCLK的1/16。
- 此模式下,波特率发生器使用一个预分频器和一个一级调制器产生位时钟BITCLKI6,该时钟比 BITCLK快16倍。
- 当UCBRx设置为0或1时,第一个预分频器和调制器级被旁路,BRCLK等于BITCLKI6 - 在这种情况下,不能对BITCLKI6进行调制,因此忽略UCBRFx位。
8.4.4 波特率的设置
若N <16,设置UCOS16=0选择低频波特率产生模式。
若N ≥16,设置UCOS16=1选择过采样波特率产生模式。
- 在低频模式下:
- 预分频器设置: UCBRx=INT(N)
- 二级调制器设置: UCBRSx=round[(N - INT(N)) X 8],round[ ]表示就近取整
//时钟源32768Hz,波特率2400,低频模式
UCA1CTL1 |= UCSWRST; // Put state machine in reset
UCA1CTL1 |= UCSSEL_1; // CLK = ACLK = 32768Hz
UCA1BR0 = 0x0D; // (32768/2400=13.65)
UCA1BR1 = 0x00; //
UCA1MCTL |= UCBRS_5; // (0.65*8=5.2)
UCA1CTL1 &= ~UCSWRST; // Initialize USCI state machine
- 过采样模式:
- 预分频器设置: UCBRx=INT(N/16)
- 一级调制器设置: UCBRFx=round([(N/16) - INT(N/16)] X 16)
- 若需更高波特率精度,可同时使用二级调制器UCBRSx。
//时钟源1048576Hz,波特率9600,过采样模式
UCA1CTL1 |= UCSWRST; // **Put state machine in reset**
UCA1CTL1 |= UCSSEL_SMCK; // BRCLK = SMCLK
UCA1BR0 = 6; // 1048576/9600=109.23;109.23/16=6.83
UCA1BR1 = 0; //
UCA1MCTL = UCBRF_13 + UCOS16; //UCBRFx=0.83*16=13.28,并置位UCOS16
UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
8.5 关于UCAxIV
- 可以通过UCAxIV确定中断由那个中断源提出
- 关闭中断不会影响UCAxIV的值
- UCAxIV寄存器的任何访问,读取或写入都会自动复位最高待处理的中断标志
- 如果设置了另一个中断标志,则在服务初始中断后立即产生另一个中断。
8.6 各种寄存器
8.6.1 UCAxCTL1
- UCSSELx,USCI时钟源,即BRCLK
- UCSWRST,复位USCI,必须复位后才能配置寄存器
8.6.2 UCAxBR0 & UCAxBR1
预分频寄存器。UCAxBR0 是低八位,一般只需要配置这个就可以了
8.6.3 UCAxMCTL
- UCBRFx,一级调制器,只能用于过采样模式
- UCBRSx,二级调制器,一般用于低频模式
- UCOS16,为1时,过采样;为0时,低频模式
8.6.4 UCAxRXBUF
接收数据的缓冲寄存器
8.6.5 UCAxTXBUF
发送数据的缓冲寄存器
8.6.6 UCAxIE
中断使能寄存器
- UCTXIE,发送中断使能
- UCRXIE,接收中断使能
8.6.7 UCAxIV
USCI中断向量寄存器
00h = 无中断待处理
02h =中断源:数据已经接收;中断标志位:UCRXIFG;中断优先级:最高
04h =中断源:传送缓冲区空; 中断标志位: UCTXIFG;中断优先级:最低
- 【注意】:这里给大家道个歉,我在帮扶班讲的关于这个IV寄存器的部分是有点问题的。其实其中的中断优先级是不能自己定义的,单片机还是已经给你定义好了,并且在数据手册中给出。如图:

8.7 例程
8.7.1 查询方式发送/接收数据
采用查询方式,低频模式波特率,时钟源ACLK=32768Hz,波特率2400.
#include 8.7.2 中断方式
采用中断方式,过采样,时钟源SMCLK=1048576Hz,波特率9600
这里省略了很多代码。
#include 第九章
结束!祝大家考个好成绩