蓝桥杯之单片机设计与开发——第八届省赛_基于单片机的电子钟程序设计与调试
目前在准备蓝桥杯,自己写了往届的赛题,调试以后觉得没什么问题。希望大家能给出一些建议,指出其中的错误和不足,也真挚地希望能给大家提供一些方法和思路。共勉!
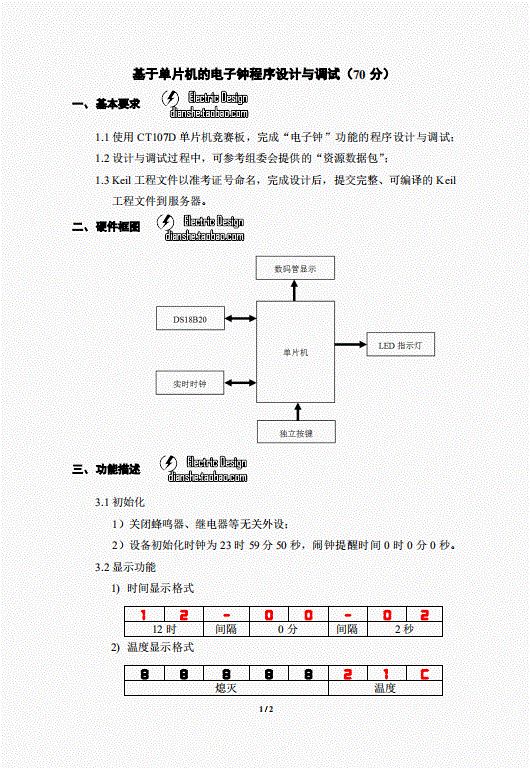
赛题

main.c
#include
#include
#include
#define uchar unsigned char
#define uint unsigned int
void writedata(uchar gate,uchar mydata);
void display();
void choose(uchar value);
uchar readtab();
void m1c0();
void blink5s();
code uchar tab[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71,0x00,0x40};
uchar disp[]={16,16,17,16,16,17,16,16};
bit flag20ms,flag500ms,flagin,flagblink,flag100ms,flag400ms,flagpush;
uchar tem,shi1,fen1,miao1,shi,fen,miao,mode=1,ii=0,a,b,c,ala=0,alb=0,alc=0,temp80=0xff,count;
void main()
{
uchar value=0xff;
TMOD=0x01;
TH0=(65536-2000)/256;
TL0=(65536-2000)%256;
TR0=1;
ET0=1;
EA=1;
writedata(0xa0,0x00);
set_time(23,59,50);
while(1)
{
miao1=Read_Ds1302(0x81);miao=miao1/16*10+miao1%16;
fen1=Read_Ds1302(0x83);fen=fen1/16*10+fen1%16;
shi1=Read_Ds1302(0x85);shi=shi1/16*10+shi1%16;
tem=rd_tem();
while(tem>50)
tem=rd_tem();
if(flagblink)
blink5s();
if(flag20ms)
{
flag20ms=0;
value=readtab();
if(flagblink&&value!=0xff)
{
flagblink=0;flagin=0;
P0=0xff;temp80=0xff;writedata(0x80,temp80);
}
choose(value);
}
if(mode==1)
{
if(ii==0&&flagpush==0)
{
disp[0]=shi/10;disp[1]=shi%10;disp[3]=fen/10;disp[2]=17;
disp[4]=fen%10;disp[5]=17;disp[6]=miao/10;disp[7]=miao%10;
}
if(mode==2&&flagpush==0)
{
disp[0]=a/10;disp[1]=a%10;disp[3]=b/10;disp[2]=17;
disp[4]=b%10;disp[5]=17;disp[6]=c/10;disp[7]=c%10;
}
if(ii==0)
{
if(!flagin)
{
if(shi==ala&&fen==alb&&miao==alc)
{
count=0;
flagin=1;
flagblink=1;
}
}
}
}
}
}
void choose(uchar value)
{
if(mode==1)
{
switch(value)
{
case 0:m1c0();break;
case 4:
{
if(ii==0)
{
a=ala;b=alb;c=alc;mode=2;
disp[0]=a/10;disp[1]=a%10;disp[3]=b/10;disp[2]=17;
disp[4]=b%10;disp[5]=17;disp[6]=c/10;disp[7]=c%10;
}
}break;
}
}
if(mode==2)
{
switch(value)
{
case 4:m1c0();break;
}
}
switch(value)
{
case 8:
{
if(ii!=0)
{
switch(ii)
{
case 1:{if(++a>=24) a=23;}break;
case 2:{if(++b>=60) b=59;}break;
case 3:{if(++c>=60) c=59;}break;
}
}
}break;
case 12:
{
if(ii!=0)
{
switch(ii)
{
case 1:{if(a--==0) a=0;};break;
case 2:{if(b--==0) b=0;};break;
case 3:{if(c--==0) c=0;};break;
}
}
}break;
}
}
void m1c0()
{
if(mode==1)
{
if(ii==0) {a=shi;b=fen;c=miao;}
}
if(++ii==4)
ii=0;
if(mode==1)
{
if(ii==0) set_time(a,b,c);
}
if(mode==2)
{
if(ii==0) {ala=a;alb=b;alc=c;mode=1;}
}
}
void blink5s()
{
flagin=0;
if(flag100ms)
{
flag100ms=0;
temp80^=0x01;
P0=0xff;
writedata(0x80,temp80);
}
if(count==50||ii!=0)
{
count=100;
flagblink=0;
P0=0xff;temp80=0xff;writedata(0x80,temp80);
}
}
void writedata(uchar gate,uchar mydata)
{
P2=(P2&0x1f)|gate;
P0=mydata;
P2&=0x1f;
}
void display()
{
static uchar i;
if(ii!=0)
{
if(flag500ms)
{
switch(ii)
{
case 1:{disp[0]=16;disp[1]=16;}break;
case 2:{disp[0]=a/10;disp[1]=a%10;disp[3]=16;disp[4]=16;}break;
case 3:{disp[3]=b/10;disp[4]=b%10;disp[6]=16;disp[7]=16;}break;
}
}
else
{
switch(ii)
{
case 1:{disp[0]=a/10;disp[1]=a%10;}break;
case 2:{disp[0]=a/10;disp[1]=a%10;disp[3]=b/10;disp[4]=b%10;}break;
case 3:{disp[6]=c/10;disp[7]=c%10;}break;
}
}
}
if(++i==8)
i=0;
writedata(0xe0,0xff);
writedata(0xc0,1<=100) count=100;
count++;
flag100ms=1;
}
if(dd++==200)
{
dd=0;
flag400ms=1;
}
} ds1302.c
/*
程序说明: DS1302驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include
#include
#define uchar unsigned char
#define uint unsigned int
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302复位
void Write_Ds1302_Byte(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302( unsigned char address,unsigned char dat )
{
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
Write_Ds1302_Byte(address);
Write_Ds1302_Byte(dat);
RST=0;
}
unsigned char Read_Ds1302 ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
Write_Ds1302_Byte(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0;
_nop_();
RST=0;
SCK=0;
_nop_();
SCK=1;
_nop_();
SDA=0;
_nop_();
SDA=1;
_nop_();
return (temp);
}
void set_time(uchar shi,uchar fen,uchar miao)
{
Write_Ds1302(0x8e,0x00);
Write_Ds1302(0x80,miao/10*16+miao%10);
Write_Ds1302(0x82,fen/10*16+fen%10);
Write_Ds1302(0x84,shi/10*16+shi%10);
Write_Ds1302(0x8e,0x80);
} onewire.c
/*
程序说明: 单总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台(外部晶振12MHz) STC89C52RC单片机
日 期: 2011-8-9
*/
#include "reg52.h"
#define uchar unsigned char
#define uint unsigned int
sbit DQ = P1^4; //单总线接口
//单总线延时函数
void Delay_OneWire(unsigned int t) //STC89C52RC
{
while(t--);
}
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20设备初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float rd_tem()
{
uchar low,high;
float tem;
uint temp;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
Delay_OneWire(200);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low=Read_DS18B20();
high=Read_DS18B20();
temp=high;
temp=(temp<<8)|low;
tem=temp*0.0625;
return tem;
}onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#define uchar unsigned char
#define uint unsigned int
unsigned char rd_temperature(void); //; ;
float rd_tem();
#endif
ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
#define uchar unsigned char
#define uint unsigned int
void Write_Ds1302_Byte(unsigned char temp);
void Write_Ds1302( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302 ( unsigned char address );
void set_time(uchar shi,uchar fen,uchar miao);
#endif
坐等各位大佬地批评指正,谢谢!