无人驾驶常用传感器及其作用概述
<什么样的传感器有什么样的作用>
目录
1.1、摄像头
1.2、双目、RGB-D摄像头
1.3、激光雷达
1.4、惯性测量单元(Inertial Measurement Unit,简称 IMU)
1.5、毫米波雷达
1.6、GPS-RTK
1.7、超声波传感器
1.8、编码器、轮速计
1.1、摄像头
优点:成本低廉,用摄像头做算法开发的人员也比较多,技术相对比较成熟。
劣势:
获取准确三维信息非常难(单目摄像头难,双目或RGBD摄像头可以);
受环境光限制比较大;
摄像头的工作包括:
* 车道线检测;
* 障碍物检测,障碍物识别以及对障碍物进行分类,如行人和车辆检测;
* 交通标志的识别,比如识别红绿灯和限速牌。
* 视觉slam:通过摄像头实现定位与建图。
1.2、双目、RGB-D摄像头
双目方案:
最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
结构光方案:
目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
TOF方案:
传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。
双目、RGB-D工作包括:
* 障碍物检测,障碍物识别以及对障碍物进行分类;
* 视觉slam:通过摄像头实现定位与建图。
1.3、激光雷达
激光雷达能非常详细的获得一个实时的三维点云数据,包括目标的三维坐标、距离、方位角、反射激光的强度、激光编码、时间等等,常用的有单线、4线、16线、32线、64线、128线束。
优点:精度高、其探测距离较远,而且能够准确获取物体的三维信息;稳定性相当高,鲁棒性好。
缺点:
采集周期长,一般100ms一场数据,最快50ms但点会稀疏;
成本较高。
激光受大气及气象影响大,大气衰减和恶劣天气使作用距离降低,大气湍流会降低激光雷达的测量精度,容易丢失远处窄小目标。
激光雷达的工作包括:
第一是路沿检测;
第二是障碍物检测,障碍物识别,对静态物体和动态物体的识别;
第三是制作高精地图;
第四是定位,利用激光雷达配合AMCL、ICP算法分别实现单线、多线的激光定位;
1.4、惯性测量单元(Inertial Measurement Unit,简称 IMU)
一般由三个单轴加速度计和陀螺仪组成。惯导解算主要是通过加速度计测得的载体加速度和陀螺测得的载体相对于导航坐标系的角速度来对载体的位置、姿态及速度进行解算。
优点:
优势是不依赖外界环境,靠自身就可以实现定位。
缺点:
长时间推算,存在一个累计误差,随着时间越来越长,如果没有办法给它提供校正的话,这个误差就会越来越大。
高精度级的IMU成本居高不下,消费级精度的IMU又不能够满足自动驾驶领域的技术要求与可靠性要求。
IMU的工作包括:
- 提供机器人的姿态变化信息(三轴的加速度、角速度)。
- 根据姿态变化信息积分得到机器人当前时刻的位置、速度、姿态等信息。
- 可利用陀螺仪和加速度计配合轮速计通过车辆运动模型去推算车辆下一个时刻所处位置、航向。
- 配合GPS组成组合惯导系统。IMU可以在GPS信号消失的时候,仍然提供持续若干秒的亚米级定位精度,并且提供相对位置和相对姿态,还可以在GPS信号发生漂移的时候对GPS信号进行纠偏。
- 配合视觉摄像头组成VIO,做视觉里程计。
- 配合激光做lamb状态估计与建图。
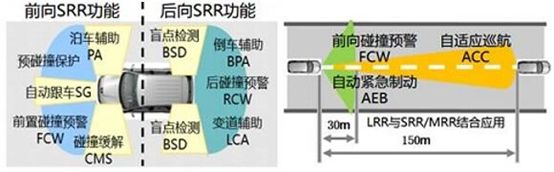
1.5、毫米波雷达
毫米波雷达可能是当前最受欢迎的传感器了,毫米波,是工作在毫米波波段(millimeter wave),工作频率在 30~100GHz,波长在1~10mm之间的电磁波,通过向障碍物发射电磁波并接收回波来精确探测目标的距离、速度和角度,其全天候全天时以及准确的测速测距深受开发者的喜爱。
凭借出色的测距测速能力,毫米波雷达被广泛地应用在自适应巡航控制(ACC)、前向防撞报警(FCW)、盲点检测(BSD)、辅助停车(PA)、辅助变道(LCA)等汽车ADAS中。
优缺点:
优点:
1、与红外、激光等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,传输距离远,具有全天候全天时的特点;
2、性能稳定,不受目标物体形状、颜色等干扰。毫米波雷达很好的弥补了如红外、激光、超声波、 摄像头等其他传感器在车载应用中所不具备的使用场景。
3、毫米波雷达的探测距离一 般在150m-250m之间,有的高性能毫米波雷达探测距离甚至能达到300m,可以满足汽车在高速运动时探测较大范围的需求。与此同时,毫米波雷达的探测精度较高。
缺点:不具备对障碍物的识别能力,容易误检测。噪声严重。
1.6、GPS-RTK
利用差分GPS卫星定位技术,通过双天线的接收机,实现对车辆的厘米级定位和准确的航向确认。配合IMU组成组合惯导设备,实现优势互补。
优点:使用方便,定位精度高;
缺点:是容易收到电磁干扰、环境遮挡影响(大楼、树荫)。
1.7、超声波传感器
超声波传感器是根据超声波在空气中的传播速度为已知,超声波遇到障碍物会反射回来的特性进行距离测量的一种传感器。首先,超声波传感器会发射一组高频声波,一般为40-45KHz,当声波遇到物体后,就会被反弹回,并被接受到。通过计算声波从发射到返回的时间,再乘以声波在媒介中的传播速度(344 米/秒,空气中)。从而获得物体相对于传感器的距离值。
1、精度:超声波测距的测量精度是厘米级;
2、报错概率:超声波测距传感器容易报错,主要原因在于超声波测距传感器是声波发射,具有声波的扇形发射特性,所以当声波经过之处障碍物较多时,反射回来的声波较多,干扰较多,易报错;
3、测量范围:超声波测距仪的测量范围通常在80米以内,车用超声探头一般2.5米以内。
优点:成本低,使用方便;
缺点:
由于声速固定,所以探测距离和探测评率一般较小;
容易受到干扰,经常出现误报、错报;
容易丢失面积较小的障碍物;
探测角度大,只能得到障碍物的大致方位,无法精确获取障碍物的具体位置;
超声测距传感器一般都有探测盲区,单探头超声传感器盲区在20-30厘米。
1.8、编码器、轮速计
编码器是安装在底盘驱动电机、驱动轴或者轮子上的测量电机、轮子转动速度、位置的传感器,根据单位时间的脉冲个数或者单位脉冲的时间差即可计算出轮子单位时间的转动速度。
优点:成本低,使用方便,精度高,速度反馈准确、及时;
缺点:对于非电机自带的传感器,安装较为麻烦,机械设计要求较高。