基于单目视觉的四旋翼定点降落——地标设计与识别算法(四)
前面讲了三讲的环境搭建,今天终于要开始讲算法啦。先来描述一下定点降落的过程,四旋翼上搭载的摄像头识别地面上的标志,然后以地面标志作为引导,降落到标志所在处。所以,我们今天先来讲讲地标的设计与识别算法。
首先是地标设计,地标设计有一个最重要的原则就是特征明显。优秀的地标能够简化识别算法,提高降落效率与鲁棒性。我的地标是这个样子滴~~~
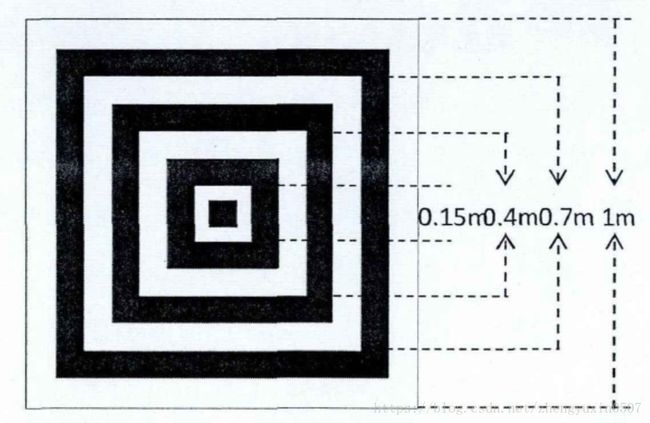
这样设计的好处在于特征明显,黑白相间的正方形非常容易识别。而且,正方形由小到大逐级嵌套,起到分级识别的作用。比如,飞机降落到接近地标的时候,我们很有可能看不到最大的那个矩形了,但是我们依然可以识别到稍小的矩形。当然,这个地标并非是我原创,借鉴于一篇硕士论文《基于视觉的小型无人直升机自主降落导航系统的设计和研究》,有兴趣的同学可以在CSDN上搜索一下。
下面,我就来讲讲最重要的地标识别算法吧。分为几个步骤:动态阈值二值化、轮廓提取与矩形检测、矩形聚类与识别。
1 动态阈值二值化
为了提高识别算法的鲁棒性,我决定采用大津动态阈值的方法将图像二值化。具体理论就不多讲了,毕竟不是什么新的东西,我们的重点也不在这块。直接上代码吧~~~(这里啰嗦一句,这段代码我是抄CSDN上一个哥们的,但是忘了出处,没有标明,实在抱歉)
//输入图像,输出阈值,很简单吧
int otsuThreshold(IplImage* img)
{
int T = 0;
int height = img->height;
int width = img->width;
int step = img->widthStep;
int channels = img->nChannels;
uchar* data = (uchar*)img->imageData;
double gSum0;
double gSum1;
double N0 = 0;
double N1 = 0;
double u0 = 0;
double u1 = 0;
double w0 = 0;
double w1 = 0;
double u = 0;
double tempg = -1;
double g = -1;
double Histogram[256]={0};// = new double[256];
double N = width*height;
for(int i=0;i255? 255:temp;
Histogram[(int)temp]++;
}
}
for (int i = 0;i<256;i++)
{
gSum0 = 0;
gSum1 = 0;
N0 += Histogram[i];
N1 = N-N0;
if(0==N1)break;
w0 = N0/N;
w1 = 1-w0;
for (int j = 0;j<=i;j++)
{
gSum0 += j*Histogram[j];
}
u0 = gSum0/N0;
for(int k = i+1;k<256;k++)
{
gSum1 += k*Histogram[k];
}
u1 = gSum1/N1;
//u = w0*u0 + w1*u1;
g = w0*w1*(u0-u1)*(u0-u1);
if (tempg 可以对比一下原图和二值化后的图像:

2 轮廓提取与矩形检测
轮廓提取用了opencv现成的函数——cvFindContours。具体用法直接百度就行,不再赘述。主要是矩形检测,我们分为两步:多边形近似、四边形提取。首先用cvApproxPoly函数对所有提取出的轮廓多边形近似,再寻找具有四条边且面积较大的(过滤较小的图形)的轮廓,我们暂且将其判定为矩形。代码如下:
void FindSquares( IplImage* src, CvSeq* squares, CvMemStorage* storage, vector &squares_centers, vector< vector > &squares_v, Point pt )
{
CvSeq* cv_contours; // 边缘
CvSeq* result; // the result of detecting squares
CvSeqReader reader; // the pointer to read data of "result"
CvPoint corner[4];
vector corner_v;
Point temp;
Point center;
cvFindContours( src, storage, &cv_contours, sizeof(CvContour),CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, pt ); //find contours
while(cv_contours)
{
if( fabs(cvContourArea(cv_contours)) > MIN_SQUARE_AREA ) //neglect the small contours
{
//findout the squares
result = cvApproxPoly( cv_contours, sizeof(CvContour), storage, CV_POLY_APPROX_DP, cvContourPerimeter(cv_contours)*0.02, 0 );
if( result->total == 4 && cvCheckContourConvexity(result) )
{
cvStartReadSeq( result, &reader, 0 );
for( int i = 0; i < 4; i++ )
{
cvSeqPush( squares,(CvPoint*)cvGetSeqElem( result, i ));
memcpy( corner + i, reader.ptr, result->elem_size );
CV_NEXT_SEQ_ELEM( result->elem_size, reader );
}
for(int i =0; i < 4; i++) //save the corner points to corner_v, it will help us process the data
{
temp = corner[i];
corner_v.push_back(temp);
}
center.x = (corner[0].x + corner[1].x + corner[2].x + corner[3].x) / 4;
center.y = (corner[0].y + corner[1].y + corner[2].y + corner[3].y) / 4;
squares_centers.push_back(center);
squares_v.push_back(corner_v);
corner_v.clear();
}
}
cv_contours = cv_contours->h_next;
}
} 执行上述代码,我们发现图像中的矩形都被检测出来了(绿色比较淡,仔细看看~~~)。

3 矩形聚类与识别
为什么要做矩形聚类?因为我们要把所有矩形分类,将中心点近似重合的矩形归为一类。最终,矩形数量最多的那一类我们判定为正确目标(因为实际生活中,很难有这么多层的矩形嵌套)。话不多说,上代码。
//输入矩形中心,输出聚类后的结果。
//比如输入(1,1)(2,2)(3,3)(1.01,1.01)
//输出为第一类为0,3,第二类为1,第三类为2。(数字表示第几个矩形中心点)
void CenterClassification( vector &squares_centers, vector< vector > &result)
{
vector centers_index;
vector result_temp;
int index_i;
int index_j;
for(int i = 0; i < squares_centers.size(); i++)
{
centers_index.push_back(i); //save the index of squares centers
}
for(int i = 0; i < centers_index.size(); i++)
{
result_temp.push_back(centers_index[i]);
for(int j = i + 1; j < centers_index.size(); j++)
{
index_i = centers_index[i];
index_j = centers_index[j];
if( ComputeDistance( squares_centers[index_i], squares_centers[index_j] ) < MIN_CENTER_DIS )
{
result_temp.push_back(centers_index[j]);
centers_index.erase(centers_index.begin() + j - 1);
j--;
}
}
result.push_back(result_temp);
result_temp.clear();
}
} 可以看一下最终的识别结果。

可见,第二歩中检测到的许多矩形都被我们过滤掉了。经过测试,这种识别方法的实时性和鲁棒性都不错。作者的电脑是i3-6100的CPU,但是检测算法跑到了30Hz以上,满足无人机实时性的要求。另外,在弱光,强光环境下,该算法的鲁棒性都很好。