准备机械车:
第一步:从Service中选择一个Generic Differential Drive (通用差速驱动:同一轴的左右轮胎可以转动不同速度的车子)放入Diagram中。

第二步:对其进行配置:选中Generic Differential Drive右键选择Set Configuration。跳到其的设定界面,选择Use a manifest,并导入,选择LEGO.NXT.Tribot.Simulation.Manifest.xml。

第三步:保存并运行可以看到这样一个场景:

操控机械车:
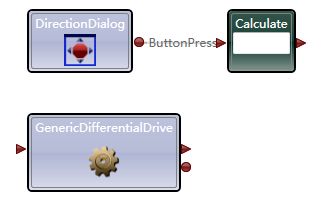
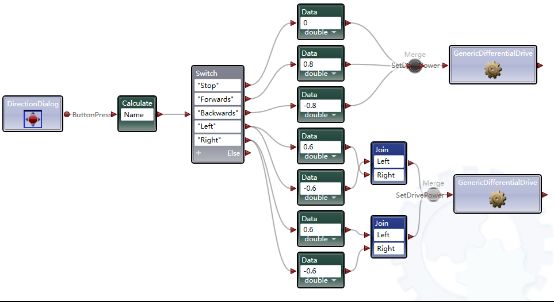
第一步:为了能够操控机械车,我们从Service中拖一个Direction Dialog(它会在系统中产生一个上下左右及Stop五个键)到Diagram中。

第二步:(Basic Activities中的Calculate:除了可以做算式运算,也可以负责拆解讯息。在VPL中,讯息可以通过Join活动组合起来,也可以通过Calculate活动拆开。如果把讯息看成某个class,Calculate就是负责调用该物件的属性,Join就是把多个属性合并成为一个新的class。)
把Calculate拉到Diagram中,再把Direction Dialog的Notification(右下方)拉到Calculate,表示把Direction Dialog的通知交给Calculate。出现Connections对话框,【From】选择ButtonPress,确定。
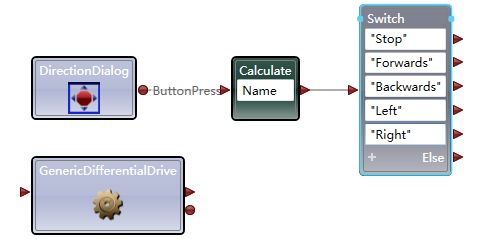
第三步:接着我们在Calculate中输入,选择Name,表示从ButtonPress这个讯息中拆解出Name这个讯息(被按下的按钮名称),这个被按下的按钮名称将会被输出到Calculate右端。

第四步:从Basic Activities中拖一个Switch到Diagram中,利用Switch左下方一个“+”添加五个按钮“Stop”,“Forwards”,“Backwards”,“Left”,“Right”,并把Calculate右边讯息交给Switch。
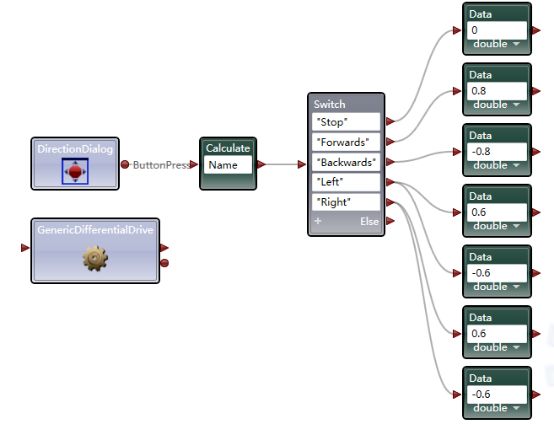
第五步:接下来是VPL的资料设定,从Basic Activities中拖七个Data到Diagram中,值的设定和连接如下图。
第六步:(Join负责把多个讯息合并成为一个,Merge也是。不同的是,Join是把多个讯息组合成为一个子讯息一起输出,而Merge则是左进右出无改变。)
从Basic Activities中拖Join、Merge到Diagram中如下图。(“Left”和“Right”中Data的输出采取不同的Join方式)
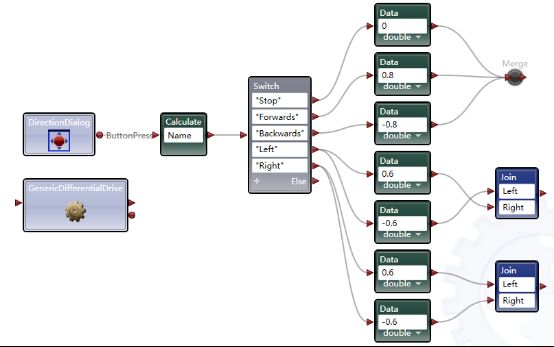
(左右连接那里并不是很懂,明白的可以告诉我。)
第七步:把Merge交给一开始的Generic Differential Drive,弹出Connections,【To】中选择SetDrivePower(类似油门),确定。然后设定值都为value,确定。这样就完成了前进、后退和停止。
第八步:相似的,把两个Join资料交给又一个Merge,再复制一个Generic Differential Drive(VPL中,只要Name属性相同就是同一物件,这样就相当于连接到一个Generic Differential Drive中),把Merge交给它,弹出Connections,【To】中依旧选择SetDrivePower,确定。然后设定值为left和right,确定。这样就完成了机械车的运行。
第九步:保存运行。
(机械车的改良将在下一学习)
2016-03-26
(资料整理于百度文库的《Microsoft_Robotics_Developer_Studio中文教程》)