俯仰 (pitch) - 偏摆 (yaw) - 翻滚 (roll)
俯仰 (pitch) - 偏摆 (yaw) - 翻滚 (roll)
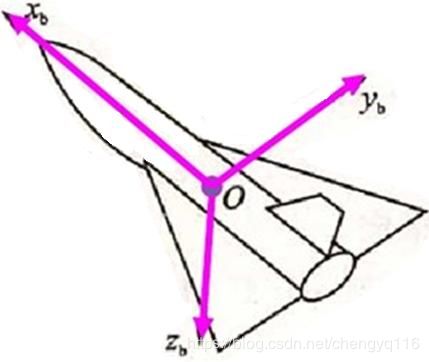
1. 机体坐标系
机体坐标系是指固定在飞行器或者飞机上的遵循右手法则的三维正交直角坐标系,其原点位于飞行器的重心,OX 轴位于飞行器参考平面内平行于机身轴线并指向飞行器前方,OY 轴垂直于飞行器参考面并指向飞行器右方,OZ 轴在参考面内垂直于 XOY 平面,指向航空器下方。
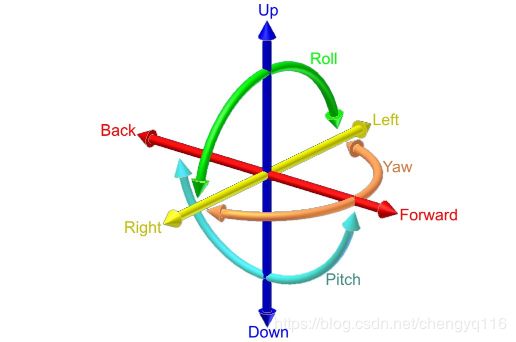
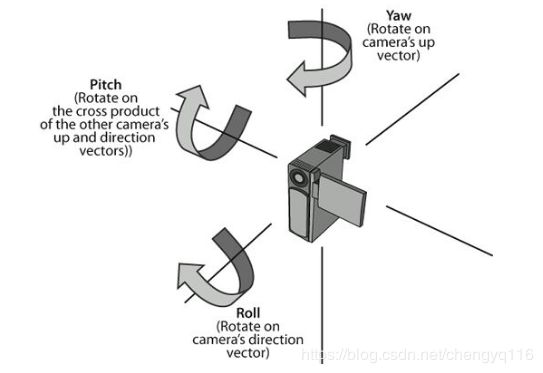
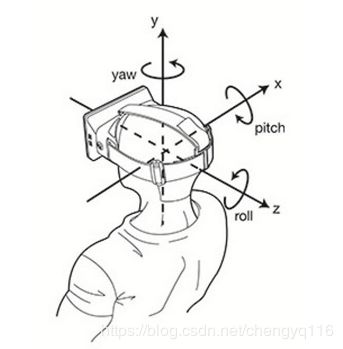
关于右手笛卡尔坐标系的 x-、y- 和 z- 轴的旋转分别叫做 roll、pitch 和 yaw 旋转。
绕 x-轴的主动旋转定义为:
R x ( θ x ) {\mathcal {R}}_{x}(\theta _{x}) Rx(θx),这里的 θ x \theta _{x} θx 是 roll 角,和右手螺旋的方向相同 (在 yz 平面逆时针)。
绕 y-轴的主动旋转定义为:
R y ( θ y ) {\mathcal {R}}_{y}(\theta _{y}) Ry(θy),这里的 θ y \theta _{y} θy 是 pitch 角,和右手螺旋的方向相同 (在 zx 平面逆时针)。
绕 z-轴的主动旋转定义为:
R z ( θ z ) {\mathcal {R}}_{z}(\theta _{z}) Rz(θz),这里的 θ z \theta _{z} θz 是 yaw 角,和右手螺旋的方向相同 (在 xy 平面逆时针)。
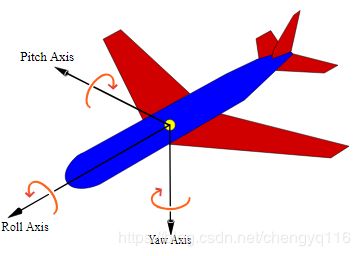
Vertical axis (yaw)
偏摆 - yaw - 偏航角
机头右偏航为正。
Transverse axis (pitch)
俯仰 - pitch - 俯仰角
机头上抬为正。
Longitudinal axis (roll)
翻滚 - roll - 翻滚角
机体右翻滚为正。
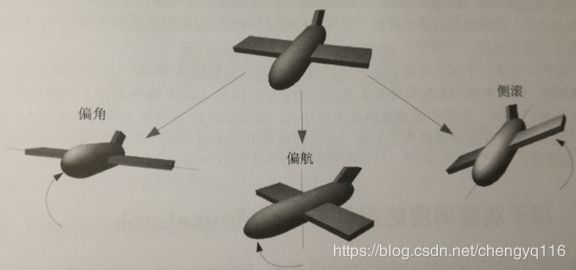
2. 六自由度
六自由度是指刚体在三维空间中运动的自由度。特别是指刚体可以在前后、上下、左右三个互相垂直的坐标轴上平移,也可以在三个垂直轴上旋转其方向,三种旋转方向称为俯仰 (pitch)、偏摆 (yaw) 及翻滚 (roll)。
六个运动的自由度:前后、上下、左右、俯仰 (pitch)、偏摆 (yaw)、翻滚 (roll)
2.1 三个平移自由度与三个旋转自由度
平移:
沿 X 轴前后移动
沿 Y 轴左右移动
沿 Z 轴上下移动
旋转:
绕 X 轴旋转 (翻滚 - roll - 翻滚角)
绕 Y 轴前后旋转 (俯仰 - pitch - 俯仰角)
绕 Z 轴左右旋转 (偏摆 - yaw - 偏航角)
roll [rəʊl]:vt. 滚动,辗,使 (眼球等) 左右转动,(使) 原地转圈 vi. 翻滚,左右摇晃,开始移动,启动 n. 名册,滚翻
pitch [pɪtʃ]:n. 音高,场地,最高点,说教 vt. 用沥青涂,扔,投,树起,搭起,定位于 vi. 抛,扔,当投手,搭帐篷,向前跌或冲
yaw [jɔ:]:vi. (船) 偏航,偏离航线,(飞机) 偏航
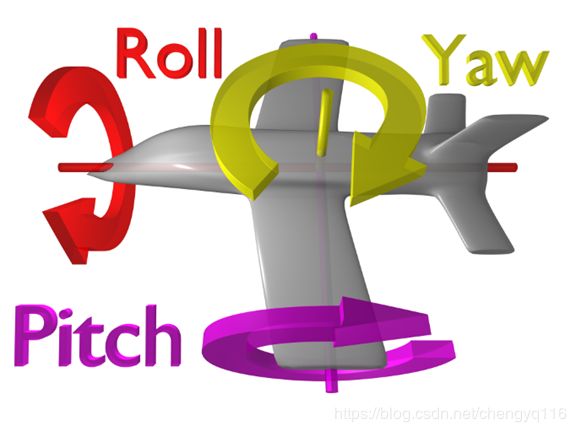
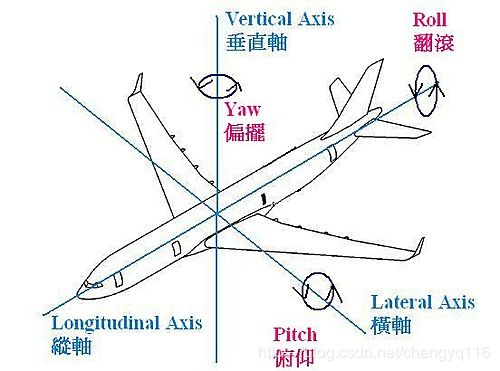
Roll, yaw and pitch axis definition for an airplane.
使用右手坐标系的时候,常见的映射是把向前对应正 z 轴,向左对应正 x 轴,向上对应正 y 轴。同样常见的是 +x 代表向前、+z 代表向右。对游戏引擎唯一要求是贯彻使用统一协定。
在 3D 系统中,假设视点为原点,则三维空间的右手笛卡尔视点坐标系如下图所示,通常 z 轴的负方向是视点方向 (OpenGL)。
Unreal Engine 使用的是左手坐标系。
3. 姿态角 (Euler 角)
姿态角描述当前设备的姿态。姿态的描述依赖于基准坐标系和载体坐标系,如下图所示,基准坐标系 ( x 0 , y 0 , z 0 ) (x_{0}, y_{0}, z_{0}) (x0,y0,z0) 和载体坐标系 ( x 1 , y 1 , z 1 ) (x_{1}, y_{1}, z_{1}) (x1,y1,z1) 。
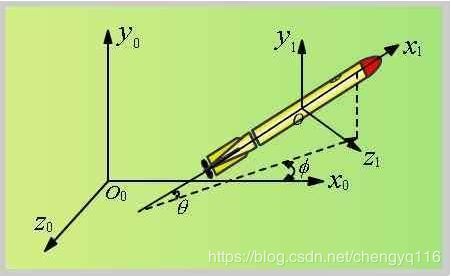
yaw、pitch 和 roll 反应了载体相对基准面的姿态。
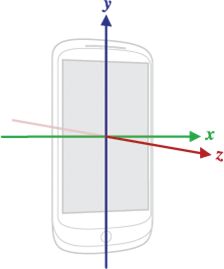
手机定义的坐标系统,X 轴是水平且指向右边,Y 轴是垂直且指向前方,Z 轴指向屏幕的正面正上方。
当手机左右摇摆时 (绕 y 轴旋转),得到变化的滚转角 (roll),范围为 (-90 to 90)
当手机前后摇摆时 (绕 x 轴旋转),得到变化的俯仰角 (pitch),范围为 (-180 to 180)
当手机横屏转换成竖屏或竖屏转换成横屏时 (绕 z 轴旋转),得到变化的偏航角 (yaw)。
4. flight dynamics - 飞行动力学
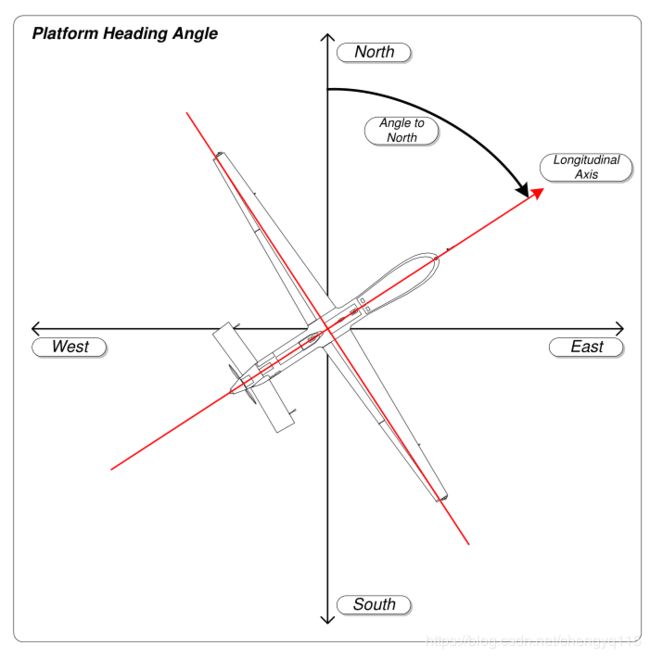
yaw or heading angle definition
longitudinal [,lɒn(d)ʒɪ'tjuːdɪn(ə)l; ,lɒŋgɪ-]:adj. 长度的,纵向的,经线的
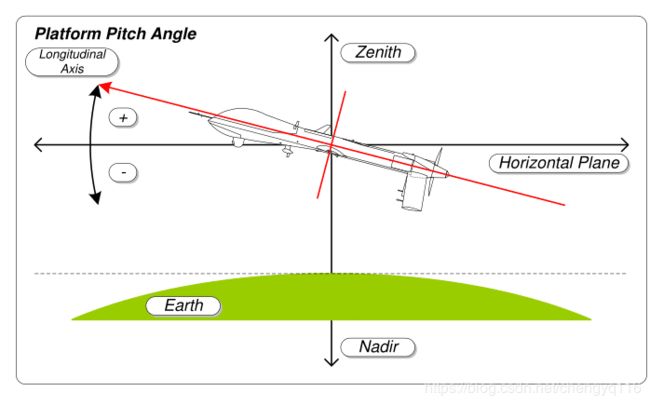
pitch angle definitio
zenith ['zenɪθ]:n. 顶峰,顶点,最高点
nadir ['neɪdɪə; 'nædɪə] :n. 最低点,最底点,天底
horizontal [hɒrɪ'zɒnt(ə)l]:adj. 水平的,地平线的,同一阶层的 n. 水平线,水平面,水平位置
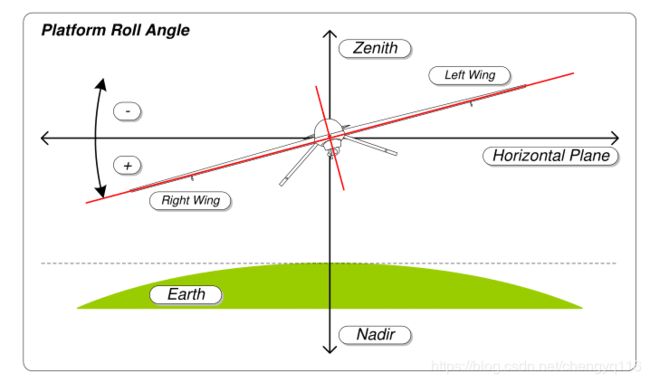
roll angle definition