树莓派+二自由度云台制作智能小车(四)——二自由度云台
二自由度云台
- 一、双舵机实现云台运动
- (1)舵机的运动原理
- (2)代码实现
- 二、摄像头模块
- (1)利用MJPG-streamer实现网络监控
- (2)motion工具实现网络视频监控
一、双舵机实现云台运动
(1)舵机的运动原理
通常情况下,伺服电机(舵机)是由一个标准的直流系统和一个内部反馈控制装置(一个减速齿轮和电位计)来组成的。伺服电机(舵机)的主要作用是将齿轮轴旋转到一个预定义的方向上。伺服电机(舵机)有3个输入引脚,GND、VCC和Signal。脉冲宽度调制技术(PWM)被应用于舵机的控制,轴的方向由脉冲的持续时间决定。需要记住的是,舵机转动的方向不是由占空比决定的,而是由脉冲长度 t 决定的。有的舵机使用的PWM频率为 fPWM=50HZ,其对应于的PWM周期 T=20 ms。脉冲长度 t 和转动方向之间的关系是线性的,但也取决于电机和齿轮的配合。下面是一个脉冲长度和转动方向的关系图。

想进一步了解伺服电机的同学:点这里
本文选用的舵机为MG90S,数字电机,下面是一些基本参数:
• 产品类型:MG90S舵机
• 产品扭矩:2.0kg/cm(4.8V),2.8kg/cm(6V)
• 产品速度:0.11秒/60°(4.8V),0.09秒/60°(6V)
• 转动角度:180°
• 工作电压:4.8 ~ 6V
• 齿轮形式:金属齿轮
• 死区设定:5us (微秒)
• 产品重量:12.2g
• 产品尺寸:22.8mm × 12.2mm × 28.5mm
(2)代码实现
在将舵机装进云台支架里时,一定要注意舵机转轴的初始角度,然后要注意竖直方向上的云台运动时是否会卡住,造成舵机损坏。然后2是代表2%,也就是min_angle,12%是max_angle。
下面的是一个舵机角度的测试代码,可以通过这个测试代码,获得转动角度和占空比:
import RPi.GPIO as GPIO
import time
P_SERVO = 16
fPWM = 50 #hz
a = 10
b = 2
def setup():
global pwm
GPIO.setmode(GPIO.BOARD)
GPIO.setup(P_SERVO,GPIO.OUT)
pwm = GPIO.PWM(P_SERVO,fPWM)
pwm.start(0)
def setDirection(direction):
duty = a / 180 * direction + b
pwm.ChangeDutyCycle(duty)
print("direction =%f , duty = %f "%(direction,duty))
time.sleep(1)
print('starting')
setup()
for direction in range(0,181,10):
setDirection(direction)
direction = 0
setDirection(0)
GPIO.cleanup()
print("done")
接下来就是舵机代码的编写了。steering.py
写代码时要注意舵机的消抖。舵机有一个死区,消抖就是取消发射脉冲,将占空比设置为0。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 云台舵机的代码
import RPi.GPIO as GPIO
import time
import atexit
# ONE servo class
class Steering:
max_delay = 0.2
min_delay = 0.04
def __init__(self,channel,init_position,min_angle,max_angle,speed):
self.channel = channel
self.init_position = init_position
self.position = init_position
self.min_angle = min_angle
self.max_angle = max_angle
self.speed = speed
atexit.register(GPIO.cleanup)
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(self.channel,GPIO.OUT,initial = False)
self.pwm = GPIO.PWM(self.channel,50) #PWM 50hz
self.pwm.start(2+10*self.position/180) #init_position
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
def forwardRotation(self):
print("current position1: "+ str(self.position))
if (self.position+self.speed) <= self.max_angle:
self.position = self.position + self.speed
self.pwm.ChangeDutyCycle(2+10*self.position/180)
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
print("current position2: "+ str(self.position))
def reverseRotation(self):
print("current position1: "+ str(self.position))
if (self.position-self.speed) >= self.min_angle:
self.position = self.position - self.speed
self.pwm.ChangeDutyCycle(2+10*self.position/180)
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
print("current position2: "+ str(self.position))
def reset(self):
print("reset to inital position ")
self.position = self.init_position
self.pwm.ChangeDutyCycle(2+10*self.position/180)
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
def turnleft(self):
self.position = self.max_angle
self.pwm.ChangeDutyCycle(2+10*self.position/180)
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
def turnrigth(self):
self.position = self.min_angle
self.pwm.ChangeDutyCycle(2+10*self.position/180)
time.sleep(Steering.max_delay)
self.pwm.ChangeDutyCycle(0) #clean duty cycle,avoid servo motor jitter
time.sleep(Steering.min_delay)
def stop(self):
self.pwm.stop()
time.sleep(Steering.max_delay)
GPIO.cleanup()
if __name__ == "__main__":
steer = Steering(16,90,0,180,10)
while True:
direction = input("Please input direction: ")
if direction == "F":
steer.forwardRotation()
elif direction == "R":
steer.reverseRotation()
elif direction == "S":
steer.stop()
当转动的角度,与预想一样时。进入对云台代码的一个编写,
根据实际情况对云台的旋转角度进行一个限制,对微调的角度进行一个设置。
首先在配置文件config.ini中加入舵机的数据:
[camera]
#BCM
#BOARD 16
#control camera's horizonal direction R:0 L:180 F:90
H_servoNum = 23
H_minPosition = 0
H_maxPosition = 180
H_InitPosition = 90
H_speed =5
#control camera's vertical direction Top:0 Bottom:130 F:60
#BOARD 18
#BCM
V_servoNum = 24
V_minPosition = 0
V_maxPosition = 105
V_InitPosition = 60
V_speed = 5
然后创建一个camera_control.py,
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 云台完整代码
from steering import Steering
import time
import configparser
class Camera:
def __init__(self):
'''
init camera's parameter
'''
config = configparser.ConfigParser()
config.read("config.ini")
#Horizontal direction control parameters
H_servoNum = config.getint("camera","H_servoNum")
H_MinPosition = config.getint("camera","H_minPosition")
H_MaxPosition = config.getint("camera","H_maxPosition")
H_InitPosition = config.getint("camera","H_InitPosition")
H_Speed = config.getint("camera","H_speed")
#Vertical direction control parameters
V_servoNum = config.getint("camera","V_servoNum")
V_MinPosition = config.getint("camera","V_minPosition")
V_MaxPosition = config.getint("camera","V_maxPosition")
V_InitPosition = config.getint("camera","V_InitPosition")
V_Speed = config.getint("camera","V_speed")
#HC= horizontal control VC=vertiacl control
self.HC = Steering(H_servoNum,H_InitPosition,
H_MinPosition,H_MaxPosition,H_Speed)
self.VC = Steering(V_servoNum,V_InitPosition,
V_MinPosition,V_MaxPosition,V_Speed)
def cameraRotation(self,direction):
'''
This method is used to control the camera's rotating
value means:
HR = turn right
HL = turn left
VU = up
VD = down
GL = left prospective
GF = front prospective
GR = right prospective
GU = up prospective
GD = down prospective
'''
if direction == "HL":
self.HC.forwardRotation()
elif direction == "HR":
self.HC.reverseRotation()
elif direction == "VU":
self.VC.reverseRotation()
elif direction == "VD":
self.VC.forwardRotation()
elif direction == "GL":
# self.VC.reset()
self.HC.turnleft()
elif direction == "GR":
# self.VC.reset()
self.HC.turnrigth()
elif direction == "GU":
self.VC.turnrigth()
elif direction == "GD":
self.VC.turnleft()
elif direction == "GF":
self.VC.reset()
self.HC.reset()
elif direction == "S":
self.VC.stop()
self.HC.stop()
else:
print("input error,please input :HL,HR,VU,VD")
if __name__ == "__main__":
camera = Camera()
while(True):
direction = input("Please input direction: ")
camera.cameraRotation(direction)
这就是云台的控制代码了接下来进行摄像头的设置。
二、摄像头模块
本文选用树莓派CSI的免驱摄像头,插上就可以直接用,配合之前发的app可以直接测试摄像头,无需多余的操作。对树莓派摄像头的操作一般有几种,下面介绍两种,一种适合自己进行Android开发的,另一种就是集成在网页上,比较方便,在网页上可以直接用,如果有不对的地方请指正。
(1)利用MJPG-streamer实现网络监控
这也是本文采用的一种方式,比较简单。
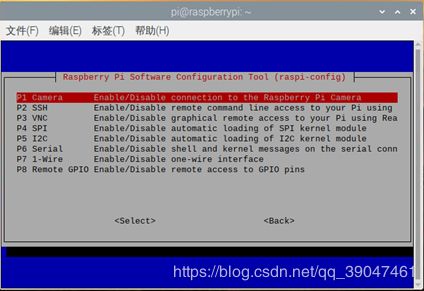
将摄像头模块一端的排线插入树莓派上的CSI摄像头卡槽。使用前需要确定树莓派的系统是否进行了更新并采用了最新固件,输入以下命令:
sudo raspi-config
在出现的界面中选择5 Interfacing Options,进入之后选择P1 Camera,如图所示,使能摄像头功能。
(2) MJPG-Streamer实现网络监控
使能摄像头之后,安装MJPG-Streamer工具来实现小车视角画面的实时网络传输。
安装依赖,输入命令:
sudo apt-get install libjpeg8-dev cmake
下载MJPG-Streamer-Master,输入命令:
wget http://github.com/jacksonliam/mjpg-streamer/archive/master.zip
unzip master.zip
对分辨率及帧率进行修改,修改帧率及分辨率如图,输入命令:
cd mjpg-streamer-master/mjpg-streamer-experimental
vim plugins/input_raspicam/input_raspicam.c

修改完成后保存退出vim,进行编译生成可执行文件,输入命令:
make clean all
开启摄像头,可通过http://树莓派ip:8080进行访问,输入命令:
./mjpg_streamer -i "./input_raspicam.so" -o "./output_http.so -w ./www"
其他的详细操作,由于树莓派的MJPG-Streamer的一个裁剪性,我并没有在参数和命令里面找到设置访问密码等参数,如果有错误,感谢指正。
(2)motion工具实现网络视频监控
之前使能摄像头的操作和方法(1)一样,
使能摄像头模块之后,安装motion工具软件来实现远程视频监控功能。输入命令:
sudo apt-get install motion
配置motion的守护进程motion daemon,让其能够一直在后台运行,需要修改/etc/default/motion文件。将start_motion_daemon=no修改为yes。执行命令:
sudo vi /etc/default/motion
配置完成之后,可以通过以下下命令来开启和关闭摄像头模块。
sudo motion 开启摄像头命令。
sudo killall motion 关闭摄像头命令。
执行开启命令之后,工作正常时,模块上的LED灯会亮起,此时可以在浏览器中输入网络地址,格式为http://树莓派ip:8081,来查看摄像头模块拍摄的实时画面内容。
(3)配置motion工具
在/etc/motion目录下找到motion.conf配置文件,在该配置文件中可以修改摄像图片的分辨率、端口号、传输速率等等。其中常用的配置如下:
staream_port 配置视频流读取的端口号
width 配置视频流每帧图片的宽度
height 配置视频流每帧图片的高度
framerate 每秒播放的帧数,范围在2-100之间,默认为100。
有兴趣的童鞋可以尝试写Android来进行一个更加舒服摇杆操控。