- 进程 ⇢ JVM ⇢ 线程 + 内存关系
MYGAG
jvm
.从零到跑起一个Java程序OS创建进程execvejava…→新进程的地址空间、handle、时间片就位。JavaLauncher进场可执行文件里的C/C++的main()解析参数,dlopenlibjvm.so/jvm.dll。JNI_CreateJavaVM诞生JVM实例△分配堆、元空间、代码缓存等△拉起GC/JIT/信号处理等守护线程把Launcher的原生线程变成Javamain线程开始
- 145、将程序划分为模块:深入理解C++中的模块化编程
raspberrypi5
C++编程入门与实践C++模块化编程头文件
将程序划分为模块:深入理解C++中的模块化编程1.模块化编程的意义在软件开发中,将大型程序划分为较小的模块是一种常见的实践。这种做法不仅提高了代码的可维护性和可读性,还便于团队协作。通过将功能分离到不同的模块中,开发者可以专注于特定的功能实现,而不必担心整个程序的复杂性。此外,模块化编程还有助于代码的重用,减少了冗余代码的编写。优点总结减少编译时间:小模块可以更快地编译,特别是对于大型项目,整体编
- c++ python 共享内存
qianbo_insist
音视频和c++java物联网c++c++python开发语言
一、目的是为了c++来读取并解码传递给python,Python做测试非常方便,c++和python之间必须定好协议,整体使用c++来解码,共享内存传递给python二、主类主类,串联decoder,注意decoder并没有直接在显存里面穿透,是解码以后传递给内存,从内存传给python#pragmaonce#define__STDC_CONSTANT_MACROS#defineSDL_MAIN_
- 模块三:现代C++工程实践(4篇)第一篇《C++模块化开发:从Header-only到CMake模块化》
AI迅剑
c++开发语言cmake
引言:现代C++工程化的核心挑战(终极扩展版)在云计算与物联网时代,C++项目规模呈指数级增长。传统Header-only开发模式暴露出编译效率低下、依赖管理混乱、版本冲突频发等致命问题。本文通过CMake3.22+Conan2.0工具链的深度集成,结合5个真实工业案例和200+行配置代码,系统阐述:Header-only库的模块化改造(含性能数据、内存分析)CMake高级配置技巧(目标属性、接口
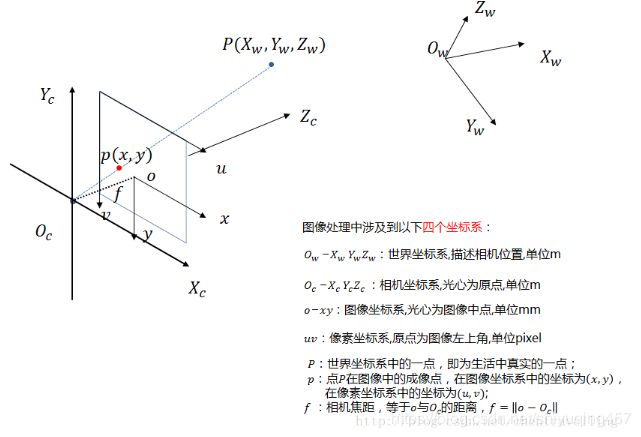
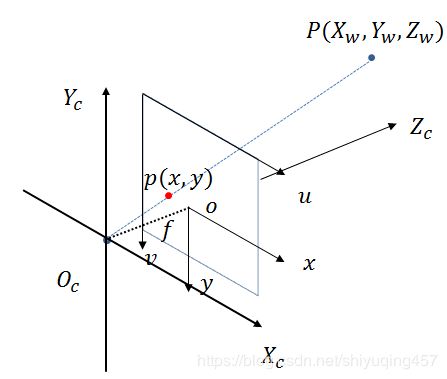
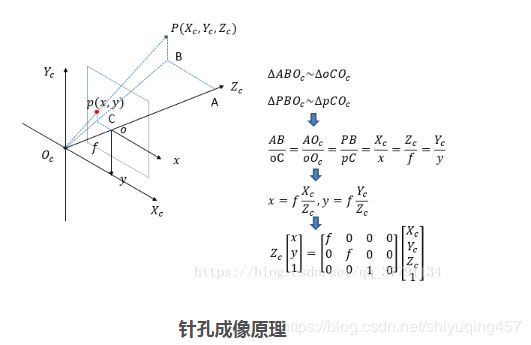
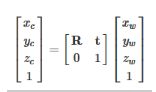
- 相机位姿估计:基于四个特征点的精准姿态解算
童嘉航Denley
相机位姿估计:基于四个特征点的精准姿态解算【下载地址】相机位姿估计1根据四个特征点估计相机姿态随文Demo本资源文件提供了一个基于OpenCV的相机位姿估计Demo,主要功能是根据四个特征点来估计相机的姿态。通过该Demo,您可以学习如何使用OpenCV库中的相关函数来实现相机位姿的估计项目地址:https://gitcode.com/open-source-toolkit/df72a项目介绍在计
- OpenCV教程——图像模糊。均值模糊,高斯模糊,中值模糊,双边模糊,高斯分布
1.图像模糊图像模糊是图像处理中最简单和常用的操作之一。⚠️使用该操作的原因之一是为了给图像预处理时降低噪声。图像模糊操作背后是数学的卷积计算。卷积操作的原理:常用的图像模糊的方法:均值模糊高斯模糊中值模糊双边模糊这四种模糊方式有时也被称为:均值滤波、高斯滤波、中值滤波和双边滤波。因为模糊属于一种滤波操作,具体关系可参照下图:其中,均值滤波、高斯滤波和中值滤波属于线性滤波;而双边滤波属于非线性滤波
- 【C++ 内存管理】静态分配和动态分配
【C++内存管理】静态分配和动态分配_静态分配内存和动态分配内存-CSDN博客1.静态分配定义:在编译阶段确定内存大小和生命周期,由编译器自动分配和释放。特点:①分配时机:程序启动时分配,程序结束时释放。②内存区域:数据段(全局变量或者静态变量)和栈区。③生命周期:与程序或模块的执行周期一致。④大小固定:内存大小在编译时已知,不可动态调整。⑤无需手动管理:由编译器自动释放。2.动态分配定义:在程序
- c++协程(Coroutines)-无限的整数序列
1.概要2.内容协程(Coroutines)是C++20引入的一种特性,它使得编写异步代码变得更加简单和直观。协程允许函数在执行过程中暂停并在稍后恢复,从而实现非阻塞的异步操作。以下是对C++协程的详细介绍:一、协程的基本概念协程是一种计算机程序组件,用于协同完成任务的子例程。它被视为轻量级线程,拥有自己的暂停点状态。协程可以在执行过程中暂停,将当前状态保存起来,并在稍后恢复执行时恢复之前保存的状
- 支持向量机(SVM)在肝脏CT/MRI图像分类(肝癌检测)中的应用及实现
猿享天开
医学影像支持向量机机器学习人工智能算法
博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C++,C#,Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C++、C#等开发语言,熟悉Java常用开发技术,能熟练应用常用数据库SQLserver,Oracle,mysql,postgresql等进行开发应用,熟悉DICOM医学影像及DICOM协议,业余时间自学JavaScript,Vue,
- C++高级编程(7)-- 协程在C++中的应用
给你一颗语法糖
C++高级编程c++开发语言
协程在C++中的应用随着现代编程范式的发展,协程(Coroutines)已经成为了并发编程和异步编程的一个重要工具。在C++中,协程是一种能够被挂起和重新恢复执行的函数,它允许程序员以一种更加直观和简洁的方式来编写异步代码。本篇博客将深入探讨C++中的协程概念、实现原理以及高级应用案例,帮助读者更好地理解和应用这一强大的编程技术。协程基础在C++20标准中,协程是通过关键字co_await,co_
- 简述C++ nlohmann/json 库
ikkkkkkkl
jsonc++nlohmann
目录JSON概述nlohmann/json库的使用创建json数组/对象字符串解析(parse反序列化)数据访问序列化文件读写JSON概述JSON(JavaScripObjectNotation)是一种轻量级、跨语言的数据交换格式。它基于ECMAScript子集,以独立于编程语言的文本格式存储和表示数据,简洁清晰的结构使其成为理想的数据交换语言,易读、易写且便于机器解析生成,能提升网络传输效率。J
- C++中noexcept的具体特性及其代码示例
码事漫谈
c++c++开发语言
文章目录1.**作为异常说明符**2.**作为运算符**3.**性能优化**4.**异常安全性**总结1.作为异常说明符noexcept可以放在函数声明或定义的后面,表示该函数不会抛出任何异常。如果函数在运行时抛出异常,程序会立即终止,并调用std::terminate()函数。特性:编译时检查:编译器会检查函数是否可能抛出异常。如果函数内部调用了可能抛出异常的代码,编译器会报错。运行时终止:如果
- 现代 C++ 容器深度解析及实践
mxpan
c++c++开发语言
一、线性容器:std::array与std::forward_list1.std::array:固定大小的高效容器在传统C++中,数组与vector的抉择常让人纠结:数组缺乏安全检查,vector存在动态扩容开销。C++11引入的std::array完美平衡了两者优势:特性解析:编译期确定大小,内存连续分配,访问效率与C数组一致;封装了迭代器、size()、empty()等标准接口,兼容STL算法
- C++从入门到放弃
一家之主呆呆蟹
C++c++
C++学习笔记--目录C++学习笔记1.C++命名空间2.继承与多态3.函数重载4.引用5.构造函数与析构函数6.初始化列表7.explicit关键字8.static静态成员和友元函数与友元类、内部类9.模板10.string11.vector12.List13.vector和list的区别及使用场景14.deque15.stack16.queue17.priority_queue18.set|m
- 计算三维空间中AOA定位的 CRLB(Cramér–Rao 下界,克拉美罗下界)公式与MATLAB例程
MATLAB卡尔曼
MATLAB定位程序与详解matlab机器学习定位导航
文章目录适用条件✅符号定义✅CRLB计算基本框架1.方向向量定义2.雅可比矩阵(Jacobian)3.Fisher信息矩阵(FIM)4.Cramér–RaoLowerBound✅例程中文注释版`aoa_crlb_3d_demo.m`✅运行输出结果在三维空间中,利用AOA(AngleofArrival,到达角度)测量信息进行目标定位时,CRLB(Cramér–RaoLowerBound)表示该测量系
- C++从入门到放弃--5.scanf()和printf()
目录5.1回顾cin和cout5.2printf()5.2.1printf()和scanf()5.2.1.1I/O的优缺点5.2.1.2操作5.2.1.3其他5.3scanf()Hello~下午好啊,告诉你们个事情:今天?更开始吧~(长文预警!!!)5.1回顾cin和cout前四章节,我们都对cin和cout有或多或少的了解,我们来回顾一下。cout是一个ostream类对象,cin是一个istr
- 『 C++入門到放棄 』 - vector 容器
逐花归海.
c++数据结构开发语言笔记
一、什麼是vectorvector是C++提供的一個容器(container),其底層邏輯類似於順序表二、vector接口(1)宣告&初始化std::vectorv;//空vectorstd::vectorv(5);//初始化為5個0(不給值默認為0)std::vectorv(5,10);//初始化為5個10std::vectorv={1,2,3};//使用初始化列表(2)基本操作v.push_b
- 『 C++入門到放棄 』- string
逐花归海.
c++程序人生开发语言c语言
C++學習筆記-string一、什麼是string?string是C++中標準函數庫中的一個類,其包含在中該類封裝了C語言中字符串操作,提供內存管理自動化與更多的操作支持複製、比較、插入、刪除、查找等功能二、常用接口整理類別常用方法/說明建立與指定std::strings="hello";長度s.size()、s.length()存取s[0]、s.at(0)(有邊界檢查)新增s.push_back
- vscode C++环境配置(供自己查阅)
想要躺平的一枚
VSCODEvscode
目录前言一、配置文件1、.vscode(1)c_cpp_properties.json(2)tasks.json(3)launch.json(4)settings.json参考链接:link前言 vscode可以当成一种强大的编辑器,只能够写代码(像VS这种IDE是集成编辑器、编译器,调试等等所有环境一起)。想要运行代码,还需要配置编译器,C++常用的编译器为MinGW,下载后将其配置到系统环境
- VScode 里面使用 python 去直接调用 CUDA
NeRF_er
pythonvscodepytorch
上一个帖子主要分享了如何去将C++程序打包成一个package。我们最后的目的实际上是想把CUDA的程序打包成一个Package,C++程序只是起到了桥梁的作用:首先:CUDA程序和C++的程序一样,都有一个.cu的源文件和一个.h的头文件。我们的文件包含Cpp文件组成,负责当作CUDA和Python的桥梁。还有对应的CUDA的源代码文件和头文件。将这个cpp文件命名成ext.cpp.#inclu
- 安装qt-sdk
Qt是一个跨平台的C++图形用户界面应用程序框架。Qt是完全面向对象的,很容易扩展,并且允许真正地组件编程。QtCreator是Qt被Nokia收购后推出的一款新的轻量级集成开发环境(IDE)。QTSDK包括了Qt库、QtCreatorIDE和Qt工具。QTCreator和QTSDK是需要分别单独安装的~在之前(这里:http://blog.csdn.net/arackethis/article/
- 【RTSP从零实践】4、使用RTP协议封装并传输AAC
博客主页:https://blog.csdn.net/wkd_007博客内容:嵌入式开发、Linux、C语言、C++、数据结构、音视频本文内容:介绍怎么使用RTP协议封装并传输AAC金句分享:你不能选择最好的,但最好的会来选择你——泰戈尔⏰发布时间⏰:2025-07-0118:43:18本文未经允许,不得转发!!!目录一、概述二、实现步骤、实现细节✨2.1、实现AAC文件读取器✨2.2、实现AAC
- 【归纳】C++入门算法模版总结(超级详细!!!)(包括高精度,排序,枚举,二分,搜索,动态规划等)
0.前言本文针对有一定算法基础的选手制作,收录了大部分算法的模板,详细解说可以点进去我提供的链接了解。或者进入我的主页给一点支持!本人也是一名新手,如果这篇文章有不严谨的地方或者不懂的地方可以在评论区留言,我会为你们一一解答的。【归纳】C++入门算法模版总结(包括高精度,排序,枚举,二分,搜索,动态规划等)(超级详细!!!)0.前言1.高精度1.1.单独实现1.1.1.高精度加法1.1.2.高精度
- (C++)学生管理系统(正式版)(map数组的应用)(string应用)(引用)(文件储存的应用)(C++教学)(C++项目)
目录源代码:代码详解:学生成绩管理系统实现详解一、系统整体设计思路1.数据结构选择2.功能模块划分二、关键函数实现原理1.文件存储与加载save_file函数load_file函数2.核心数据操作add函数mod函数find和del函数3.数据展示display函数statistics函数三、核心技术详解1.字符串分割技术2.map的使用技巧3.文件格式设计4.错误处理机制源代码:/**头文件部分
- 【基础】C++中的关键词
小熊猫爱编程
重新学编程c++开发语言
一、关键词的概念C++中的关键词是语言保留用来表示特定语法结构的单词,不能作为变量名、函数名或标识符使用。二、关键词有哪些在C++中有63个关键字,如下:关键词关键词关键词关键词关键词asmdoifreturntypedefautodoubleinlineshorttypeidbooldynamic_castintsignedtypenamebreakelselongsizeofunioncase
- 取余和取模到底是不是一回事?对比Python、Java、C和C++中的%运算符
霜叶桑
javapythonc语言c++
取余和取模到底是不是一回事?对比Python、JAVA、C和C++中的%运算符数学中的「取余」和「取模」计算机领域中的「取余」和「取模」Python、Java、C和C++中的`%`运算符Python:取模运算Java:取余运算C和C++:取余运算为什么一般用正除数数学中的「取余」和「取模」在纯数学中,当我们谈论整数除法a÷ba\divba÷b(aaa是被除数,bbb是除数,且b≠0b\not=0
- LeetCode-5.最长回文子串 C++实现
一.问题描述给你一个字符串s,找到s中最长的回文子串(如果字符串向前和向后读都相同,则它满足回文性。)。示例1:输入:s="babad"输出:"bab"解释:"aba"同样是符合题意的答案。示例2:输入:s="cbbd"输出:"bb"提示:1usingnamespacestd;classSolution{public:stringlongestPalindrome(strings){intn=s.
- 二、OpenCV的第一个程序
文章目录一、第一个程序:显示图片1.1cv::imread1.2cv::namedWindow1.3cv::imshow二、第二个程序:视频2.1cv::VideoCapture三、加入了滑动条的基本浏览窗口一、第一个程序:显示图片示例:一个简单的加载并显示图像的OpenCV程序#include#include"./opencv2/opencv.hpp"intmain(){cv::Matimage
- C++基础复习笔记
xuwzen
C++c++笔记
一、数组定义在C++中,数组初始化有多种方式,以下是常见的几种方法:默认初始化数组元素未显式初始化时,内置类型(如int、float)的元素值未定义(垃圾值),类类型调用默认构造函数。intarr1[5];//元素值未定义聚合初始化(列表初始化)使用花括号{}直接初始化所有元素。若列表元素少于数组长度,剩余元素默认初始化(内置类型为0)。intarr2[3]={1,2,3};//完全初始化inta
- Unity反射机制
future1412
unity游戏引擎
反射知识点回顾编译器是一种翻译程序它用于将源语言程序翻译为目标语言程序源语言程序:某种程序设计语言写成的,比如C#、C、C++、Java等语言写的程序目标语言程序:二进制数表示的伪机器代码写的程序知识点一什么是程序集程序集是经由编译器编译得到的,供进一步编译执行的那个中间产物在WINDOWS系统中,它一般表现为后缀为·dll(库文件)或者是·exe(可执行文件)的格式说人话:程序集就是我们写的一个
- 微信开发者验证接口开发
362217990
微信 开发者 token 验证
微信开发者接口验证。
Token,自己随便定义,与微信填写一致就可以了。
根据微信接入指南描述 http://mp.weixin.qq.com/wiki/17/2d4265491f12608cd170a95559800f2d.html
第一步:填写服务器配置
第二步:验证服务器地址的有效性
第三步:依据接口文档实现业务逻辑
这里主要讲第二步验证服务器有效性。
建一个
- 一个小编程题-类似约瑟夫环问题
BrokenDreams
编程
今天群友出了一题:
一个数列,把第一个元素删除,然后把第二个元素放到数列的最后,依次操作下去,直到把数列中所有的数都删除,要求依次打印出这个过程中删除的数。
&
- linux复习笔记之bash shell (5) 关于减号-的作用
eksliang
linux关于减号“-”的含义linux关于减号“-”的用途linux关于“-”的含义linux关于减号的含义
转载请出自出处:
http://eksliang.iteye.com/blog/2105677
管道命令在bash的连续处理程序中是相当重要的,尤其在使用到前一个命令的studout(标准输出)作为这次的stdin(标准输入)时,就显得太重要了,某些命令需要用到文件名,例如上篇文档的的切割命令(split)、还有
- Unix(3)
18289753290
unix ksh
1)若该变量需要在其他子进程执行,则可用"$变量名称"或${变量}累加内容
什么是子进程?在我目前这个shell情况下,去打开一个新的shell,新的那个shell就是子进程。一般状态下,父进程的自定义变量是无法在子进程内使用的,但通过export将变量变成环境变量后就能够在子进程里面应用了。
2)条件判断: &&代表and ||代表or&nbs
- 关于ListView中性能优化中图片加载问题
酷的飞上天空
ListView
ListView的性能优化网上很多信息,但是涉及到异步加载图片问题就会出现问题。
具体参看上篇文章http://314858770.iteye.com/admin/blogs/1217594
如果每次都重新inflate一个新的View出来肯定会造成性能损失严重,可能会出现listview滚动是很卡的情况,还会出现内存溢出。
现在想出一个方法就是每次都添加一个标识,然后设置图
- 德国总理默多克:给国人的一堂“震撼教育”课
永夜-极光
教育
http://bbs.voc.com.cn/topic-2443617-1-1.html德国总理默多克:给国人的一堂“震撼教育”课
安吉拉—默克尔,一位经历过社会主义的东德人,她利用自己的博客,发表一番来华前的谈话,该说的话,都在上面说了,全世界想看想传播——去看看默克尔总理的博客吧!
德国总理默克尔以她的低调、朴素、谦和、平易近人等品格给国人留下了深刻印象。她以实际行动为中国人上了一堂
- 关于Java继承的一个小问题。。。
随便小屋
java
今天看Java 编程思想的时候遇见一个问题,运行的结果和自己想想的完全不一样。先把代码贴出来!
//CanFight接口
interface Canfight {
void fight();
}
//ActionCharacter类
class ActionCharacter {
public void fight() {
System.out.pr
- 23种基本的设计模式
aijuans
设计模式
Abstract Factory:提供一个创建一系列相关或相互依赖对象的接口,而无需指定它们具体的类。 Adapter:将一个类的接口转换成客户希望的另外一个接口。A d a p t e r模式使得原本由于接口不兼容而不能一起工作的那些类可以一起工作。 Bridge:将抽象部分与它的实现部分分离,使它们都可以独立地变化。 Builder:将一个复杂对象的构建与它的表示分离,使得同
- 《周鸿祎自述:我的互联网方法论》读书笔记
aoyouzi
读书笔记
从用户的角度来看,能解决问题的产品才是好产品,能方便/快速地解决问题的产品,就是一流产品.
商业模式不是赚钱模式
一款产品免费获得海量用户后,它的边际成本趋于0,然后再通过广告或者增值服务的方式赚钱,实际上就是创造了新的价值链.
商业模式的基础是用户,木有用户,任何商业模式都是浮云.商业模式的核心是产品,本质是通过产品为用户创造价值.
商业模式还包括寻找需求
- JavaScript动态改变样式访问技术
百合不是茶
JavaScriptstyle属性ClassName属性
一:style属性
格式:
HTML元素.style.样式属性="值";
创建菜单:在html标签中创建 或者 在head标签中用数组创建
<html>
<head>
<title>style改变样式</title>
</head>
&l
- jQuery的deferred对象详解
bijian1013
jquerydeferred对象
jQuery的开发速度很快,几乎每半年一个大版本,每两个月一个小版本。
每个版本都会引入一些新功能,从jQuery 1.5.0版本开始引入的一个新功能----deferred对象。
&nb
- 淘宝开放平台TOP
Bill_chen
C++c物流C#
淘宝网开放平台首页:http://open.taobao.com/
淘宝开放平台是淘宝TOP团队的产品,TOP即TaoBao Open Platform,
是淘宝合作伙伴开发、发布、交易其服务的平台。
支撑TOP的三条主线为:
1.开放数据和业务流程
* 以API数据形式开放商品、交易、物流等业务;
&
- 【大型网站架构一】大型网站架构概述
bit1129
网站架构
大型互联网特点
面对海量用户、海量数据
大型互联网架构的关键指标
高并发
高性能
高可用
高可扩展性
线性伸缩性
安全性
大型互联网技术要点
前端优化
CDN缓存
反向代理
KV缓存
消息系统
分布式存储
NoSQL数据库
搜索
监控
安全
想到的问题:
1.对于订单系统这种事务型系统,如
- eclipse插件hibernate tools安装
白糖_
Hibernate
eclipse helios(3.6)版
1.启动eclipse 2.选择 Help > Install New Software...> 3.添加如下地址:
http://download.jboss.org/jbosstools/updates/stable/helios/ 4.选择性安装:hibernate tools在All Jboss tool
- Jquery easyui Form表单提交注意事项
bozch
jquery easyui
jquery easyui对表单的提交进行了封装,提交的方式采用的是ajax的方式,在开发的时候应该注意的事项如下:
1、在定义form标签的时候,要将method属性设置成post或者get,特别是进行大字段的文本信息提交的时候,要将method设置成post方式提交,否则页面会抛出跨域访问等异常。所以这个要
- Trie tree(字典树)的Java实现及其应用-统计以某字符串为前缀的单词的数量
bylijinnan
java实现
import java.util.LinkedList;
public class CaseInsensitiveTrie {
/**
字典树的Java实现。实现了插入、查询以及深度优先遍历。
Trie tree's java implementation.(Insert,Search,DFS)
Problem Description
Igna
- html css 鼠标形状样式汇总
chenbowen00
htmlcss
css鼠标手型cursor中hand与pointer
Example:CSS鼠标手型效果 <a href="#" style="cursor:hand">CSS鼠标手型效果</a><br/>
Example:CSS鼠标手型效果 <a href="#" style=&qu
- [IT与投资]IT投资的几个原则
comsci
it
无论是想在电商,软件,硬件还是互联网领域投资,都需要大量资金,虽然各个国家政府在媒体上都给予大家承诺,既要让市场的流动性宽松,又要保持经济的高速增长....但是,事实上,整个市场和社会对于真正的资金投入是非常渴望的,也就是说,表面上看起来,市场很活跃,但是投入的资金并不是很充足的......
- oracle with语句详解
daizj
oraclewithwith as
oracle with语句详解 转
在oracle中,select 查询语句,可以使用with,就是一个子查询,oracle 会把子查询的结果放到临时表中,可以反复使用
例子:注意,这是sql语句,不是pl/sql语句, 可以直接放到jdbc执行的
----------------------------------------------------------------
- hbase的简单操作
deng520159
数据库hbase
近期公司用hbase来存储日志,然后再来分析 ,把hbase开发经常要用的命令找了出来.
用ssh登陆安装hbase那台linux后
用hbase shell进行hbase命令控制台!
表的管理
1)查看有哪些表
hbase(main)> list
2)创建表
# 语法:create <table>, {NAME => <family&g
- C语言scanf继续学习、算术运算符学习和逻辑运算符
dcj3sjt126com
c
/*
2013年3月11日20:37:32
地点:北京潘家园
功能:完成用户格式化输入多个值
目的:学习scanf函数的使用
*/
# include <stdio.h>
int main(void)
{
int i, j, k;
printf("please input three number:\n"); //提示用
- 2015越来越好
dcj3sjt126com
歌曲
越来越好
房子大了电话小了 感觉越来越好
假期多了收入高了 工作越来越好
商品精了价格活了 心情越来越好
天更蓝了水更清了 环境越来越好
活得有奔头人会步步高
想做到你要努力去做到
幸福的笑容天天挂眉梢 越来越好
婆媳和了家庭暖了 生活越来越好
孩子高了懂事多了 学习越来越好
朋友多了心相通了 大家越来越好
道路宽了心气顺了 日子越来越好
活的有精神人就不显
- java.sql.SQLException: Value '0000-00-00' can not be represented as java.sql.Tim
feiteyizu
mysql
数据表中有记录的time字段(属性为timestamp)其值为:“0000-00-00 00:00:00”
程序使用select 语句从中取数据时出现以下异常:
java.sql.SQLException:Value '0000-00-00' can not be represented as java.sql.Date
java.sql.SQLException: Valu
- Ehcache(07)——Ehcache对并发的支持
234390216
并发ehcache锁ReadLockWriteLock
Ehcache对并发的支持
在高并发的情况下,使用Ehcache缓存时,由于并发的读与写,我们读的数据有可能是错误的,我们写的数据也有可能意外的被覆盖。所幸的是Ehcache为我们提供了针对于缓存元素Key的Read(读)、Write(写)锁。当一个线程获取了某一Key的Read锁之后,其它线程获取针对于同
- mysql中blob,text字段的合成索引
jackyrong
mysql
在mysql中,原来有一个叫合成索引的,可以提高blob,text字段的效率性能,
但只能用在精确查询,核心是增加一个列,然后可以用md5进行散列,用散列值查找
则速度快
比如:
create table abc(id varchar(10),context blog,hash_value varchar(40));
insert into abc(1,rep
- 逻辑运算与移位运算
latty
位运算逻辑运算
源码:正数的补码与原码相同例+7 源码:00000111 补码 :00000111 (用8位二进制表示一个数)
负数的补码:
符号位为1,其余位为该数绝对值的原码按位取反;然后整个数加1。 -7 源码: 10000111 ,其绝对值为00000111 取反加一:11111001 为-7补码
已知一个数的补码,求原码的操作分两种情况:
- 利用XSD 验证XML文件
newerdragon
javaxmlxsd
XSD文件 (XML Schema 语言也称作 XML Schema 定义(XML Schema Definition,XSD)。 具体使用方法和定义请参看:
http://www.w3school.com.cn/schema/index.asp
java自jdk1.5以上新增了SchemaFactory类 可以实现对XSD验证的支持,使用起来也很方便。
以下代码可用在J
- 搭建 CentOS 6 服务器(12) - Samba
rensanning
centos
(1)安装
# yum -y install samba
Installed:
samba.i686 0:3.6.9-169.el6_5
# pdbedit -a rensn
new password:123456
retype new password:123456
……
(2)Home文件夹
# mkdir /etc
- Learn Nodejs 01
toknowme
nodejs
(1)下载nodejs
https://nodejs.org/download/ 选择相应的版本进行下载 (2)安装nodejs 安装的方式比较多,请baidu下
我这边下载的是“node-v0.12.7-linux-x64.tar.gz”这个版本 (1)上传服务器 (2)解压 tar -zxvf node-v0.12.
- jquery控制自动刷新的代码举例
xp9802
jquery
1、html内容部分 复制代码代码示例: <div id='log_reload'>
<select name="id_s" size="1">
<option value='2'>-2s-</option>
<option value='3'>-3s-</option