操作系统原理第五章:CPU调度
目录
- 1 CPU调度基本概念
- 1.1 基本概念
- 1.2 CPU调度的时机
- 1.3 CPU调度方案
- 2 CPU调度算法
- 2.1 先来先服务(FCFS)
- 2.2 短作业优先(SJF)
- 2.3 优先级
- 2.4 RR时间片轮转
- 2.5 多级队列和多级反馈队列
1 CPU调度基本概念
1.1 基本概念
CPU调度就是就从就绪队列中选择一个进程来分配CPU的过程,进行CPU调度的原因是为了实现多道,使得CPU有更高的利用率,之所以进程能够进行CPU调度是因为进程的特点,进程执行过程中分为两个脉冲一个是CPU脉冲 (CPU Burst),一个是 I/O 脉冲 (I/O Burst),即在 CPU 上执行和等待 I/O ,进程的执行以 CPU 脉冲开始,其后跟着 I/O 脉冲,进程的执行就是在这两个状态之间进行转换,如下图所示:
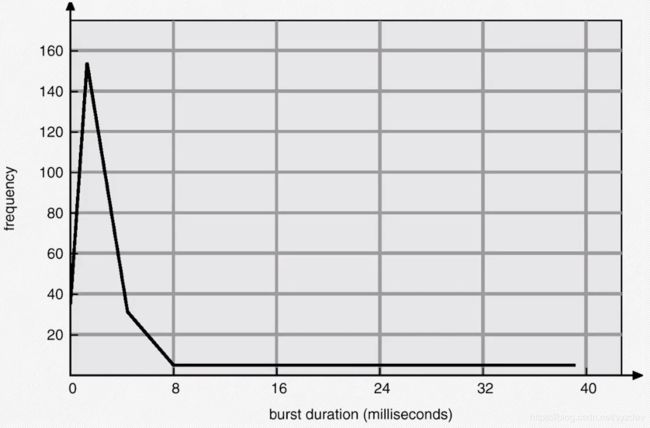
观察CPU脉冲的统计后发现,CPU 脉冲的分布,在系统中存在许多短 CPU 脉冲,只有少量的长 CPU 脉冲,比如 I/O 型作业具有许多短 CPU 脉冲,而 CPU 型作业则会有几个长 CPU 脉冲,这个分布规律对CPU 调度算法的选择是非常重要的,下图是对CPU脉冲的统计直方图,横轴是时间,竖轴是频率,可以发现频率在0~8ms的高频脉冲是比较多的:
1.2 CPU调度的时机
当CPU空闲时,OS就选择内存中的某个就绪进程,并给其分配CPU,以下是进程状态转换图,当某个进程从running状态离开时,就代表当前CPU就空闲了,图中红色和蓝色的箭头都代表着会发生CPU调度:

CPU的调度可能发生在以下情况:
- 从运行转到等待 (Switches from running to waiting state):非抢占式调度;
- 从运行转到就绪 (Switches from running to ready state):抢占式调度,时间片到;
- 从等待转到就绪 (Switches from waiting to ready):抢占式调度,若某个在就绪队列的进程优先级较高,则会抢占CPU,所以是抢占式调度;
- 终止运行 (Terminates):非抢占式调度。
1.3 CPU调度方案
CPU调度方案分为以下两种:
- 非抢占方式 (nonpreemptive):把处理机分配给某进程后,便让其一直执行,直到该进程完成或发生某事件而被阻塞时,才把处理机分配给其它进程,不允许其他进程抢占已经分配出去的处理机,其优点是实现简单、系统开销小,适用于大多数批处理系统环境,缺点是难以满足紧急任务的要求,不适用于实时、分时系统要求
- 抢占方式(Preemptive mode):允许调度程序根据某个原则,去停止某个正在执行的进程,将处理机重新分配给另一个进程
对于抢占方式,抢占有如下的原则:
- 时间片原则:各进程按时间片运行,当一个时间片用完后,便停止该进程的执行而重新进行调度。这个原则适用于分时系统;
- 优先权原则:通常对一些重要的和紧急的进程赋予较高的优先权。当这种进程进入就绪队列时,如果其优先权比正在执行的进程优先权高,便停止正在执行的进程,将处理机分配给优先权高的进程,使之执行;
- 短作业优先原则:当新到达的作业比正在执行的作业明显短时,将暂停当前长作业的执行,将处理机分配给新到的短作业,使之执行。
2 CPU调度算法
设计CPU调度算法的性能指标有如下几点:
- CPU利用率:使CPU尽可能的忙碌;
- 吞吐量:单位时间内运行完的进程数;
- 周转时间:进程从提交到运行结束的全部时间 ;
- 等待时间:进程在就绪队列中等待调度的时间片总和;
- 响应时间 :从进程提出请求到首次被响应的时间段,在分时系统环境下不是输出完结果的时间
注:调度算法影响的是等待时间 , 而不能影响进程真正使用CPU 的时间和 I/O 时间
2.1 先来先服务(FCFS)
先来先服务 (First-Come-First-Served),其算法思想和字面意思一样,就是先到来的进程,先被调度,这是最简单的调度算法,FCFS属于非抢占方式,一旦一个进程占有处理机,它就一直运行下去,直到该进程完成或者因等待某事件而不能继续运行时才释放处理机。FCFS 算法易于实现,表面上很公平 ,实际上有利于长作业,不利于短作业;有利于 CPU 繁忙型,不利于 I/O 繁忙型,可以看下面的例子。
假设有 P 1 P_1 P1, P 2 P_2 P2, P 3 P_3 P3 三个进程,所需的CPU脉冲时间分别为24,3,3,如下表:
| 进程 | CPU脉冲时间 |
|---|---|
| P 1 P_1 P1 | 24 |
| P 2 P_2 P2 | 3 |
| P 3 P_3 P3 | 3 |
现设三个进程到来的顺序是 P 1 P_1 P1, P 2 P_2 P2, P 3 P_3 P3,那么该调度的Gantt图如下:

各个进程的等待时间如下表:
| 进程 | 等待时间 |
|---|---|
| P 1 P_1 P1 | 0 |
| P 2 P_2 P2 | 24 |
| P 3 P_3 P3 | 27 |
平均等待时间为 t = 0 + 24 + 27 3 = 17 t=\frac{0 + 24 + 27}{3}=17 t=30+24+27=17。
现假设三个进程到来的顺序是 P 2 P_2 P2, P 3 P_3 P3, P 1 P_1 P1,那么该调度的Gantt图如下:

各进程的等待时间如下表:
| 进程 | 等待时间 |
|---|---|
| P 1 P_1 P1 | 6 |
| P 2 P_2 P2 | 0 |
| P 3 P_3 P3 | 3 |
平均等待时间为 t = 6 + 0 + 3 3 = 3 t=\frac{6 + 0 + 3}{3}=3 t=36+0+3=3。
由上面两个例子可以看出,在先来先服务算法中,进程到来的次序对平均等待时间的影响是很大的,这里有个专业名词叫做 护航效应 (Convoy effect)
护航效应 (Convoy effect):
- 假设有一个CPU进程和许多I/O型进程
- 当CPU进程占用CPU运行时, I/O型进程可能完成了其I/O操作,回到就绪队列等待CPU, I/O设备空闲
- CPU进程释放CPU后, I/O型进程陆续使用CPU,并很快转为I/O操作,CPU空闲
在这种情况下,CPU和 I/O 设备并没有得到有效的利用。
2.2 短作业优先(SJF)
短作业优先 (Shortest-Job-First),其算法思想是关联到每个进程下次运行的 CPU 脉冲长度,调度最短的进程,由于进程是不断调入到就绪队列中的,其整个就绪队列中的最短作业,也是动态变化的,此时就要面临一个问题了,若现在到来了一个所需CPU脉冲时间最短的一个进程,那么是让当前执行的进程让位,还是等当前进程执行完再执行,所以有如下两种策略:
- 非抢占式调度:一旦进程拥有 CPU , 它的使用权限只能在该 CPU 脉冲结束后让出;
- 抢占式调度 :发生在有比当前进程剩余时间片更短的进程到达时,也称为最短剩余时间优先调度
短作业优先SJF算法是最优的,因为对一组指定的进程而言,它给出了最短的平均等待时间,如下面的例子:
现有四个进程 P 1 P_1 P1, P 2 P_2 P2, P 3 P_3 P3, P 4 P_4 P4,他们的到达时间和所需CPU脉冲时间如下表:
| 进程 | 到达时间 | CPU脉冲时间 |
|---|---|---|
| P 1 P_1 P1 | 0 | 7 |
| P 2 P_2 P2 | 2 | 4 |
| P 3 P_3 P3 | 4 | 1 |
| P 4 P_4 P4 | 5 | 4 |
若采用抢占式的调度,其调度Gantt图如下:

平均等待时间为 t = 9 + 1 + 0 + 2 4 = 3 t=\frac{9 + 1 + 0 + 2}{4}=3 t=49+1+0+2=3。
若采用非抢占式的调度,其调度Gantt图如下:

平均等待时间为 t = 0 + 6 + 3 + 7 4 = 4 t=\frac{0 + 6 + 3 + 7}{4}=4 t=40+6+3+7=4。
虽说短作业优先算法是最优的算法,但是实际上在实现起来确实很难的,因为要不断的统计各个进程所需的CPU脉冲时间,这显然实现难度高,就算能实现,其开销也会非常大,所以实际应用中是估计进程所需时间,可以通过先前的CPU脉冲长度及计算指数均值进行估计。
综上所述,采用SJF有利于系统减少平均周转时间,提高系统吞吐量,一般情况下SJF调度算法比FCFS调度算法的效率要高一些, 但实现相对要困难些。如果作业的到来顺序及运行时间不合适,会出现饥饿现象,例如,系统中有一个运行时间很长的作业JN,和几个运行时间小的作业,然后,不断地有运行时间小于JN的作业的到来,这样,作业JN就因得不到调度而饿死。另外,作业运行的估计时间也有问题。
2.3 优先级
上面所讲的短作业优先算法实际上是优先级算法的一个特例,短作业优先算法将作业所需时间定为衡量优先级的量,表示优先级的量一般为一个整数,这里假定越小的数优先级越高,下面 P 1 P_1 P1, P 2 P_2 P2, P 3 P_3 P3, P 4 P_4 P4, P 5 P_5 P5 五个进程的调度状况如下:
| 进程 | CPU脉冲时间 | 优先级 |
|---|---|---|
| P 1 P_1 P1 | 10 | 3 |
| P 2 P_2 P2 | 1 | 1 |
| P 3 P_3 P3 | 2 | 4 |
| P 4 P_4 P4 | 1 | 5 |
| P 5 P_5 P5 | 5 | 2 |
根据优先级,其调度顺序为 P 2 P_2 P2, P 5 P_5 P5, P 1 P_1 P1, P 3 P_3 P3, P 4 P_4 P4,平均等待时间为 8.2 。
那么进程的优先级如何确定呢?通常在进程创建时确定,且在整个生命期中保持不变,这种叫静态优先级,静态优先级就会出现饥饿问题,即某个进程若优先级非常低,它几乎永远得不到CPU调度。
一个很有意思的例子:当MIT的IBM7094机器于1973年关掉时,人们发现一个于1967年提交的一个低优先权的进程还没有得到运行。
解决方法是老化,根据进程等待时间的延长提高其优先数,也就是动态优先级,优先级会根据等待时间不断调整。考虑改变优先级的因素通常有进程的等待时间,已使用CPU的时间,资源使用情况等。
2.4 RR时间片轮转
RR (Round Robin),这个算法主要用在分时系统里,这个算法的思想是每个进程将得到小单位的 CPU 时间 (时间片),通常为 10-100 毫秒 。时间片用完后,该进程将被抢占并插入就绪队列末尾。
例如有四个进程 P 1 P_1 P1, P 2 P_2 P2, P 3 P_3 P3, P 4 P_4 P4 如下表,设时间片大小为 20:
| 进程 | CPU脉冲时间 |
|---|---|
| P 1 P_1 P1 | 53 |
| P 2 P_2 P2 | 17 |
| P 3 P_3 P3 | 68 |
| P 4 P_4 P4 | 24 |
其调度Gantt图如下:

一般来说,RR的平均周转时间比SJF长,但响应时间要短一些。
对于时间片轮转算法,确定时间片大小是非常重要的,若时间片过大,则每个进程都能在单个时间片能完成,则时间片轮转等价于先来先服务算法,若时间片过小,则各个进程要频繁的切换,造成大量的资源开销。
2.5 多级队列和多级反馈队列
多级队列的意思是把进程根据其某种属性进行分类,每一类的进程都会组成一个就绪队列,也就是说在操作系统中会有多个就绪队列,每个进程固定的处在自己所属的队列中,对于不同的队列,也可以有自己专属的调度算法,那么此时就要进行队列的调度,可以给每个队列设置不同的优先级,若是固定优先级,则会产生饥饿问题。那么另一种解决方案就是基于时间片的算法,给定 时间片调度,即个队列得到一定的 CPU 时间,进程在给定时间内执行,如下图:
若某个进程在一个优先级较低的队列中,那么它就会一直处于饥饿状态,解决方案是多级反馈队列调度,存在多个就绪队列,具有不同的优先级,各自按时间片轮转法调度,它与多级队列的不同是它允许进程在队列之间移动,当一个进程执行完一个完整的时间片后被抢占处理器,被抢占的进程优先级降低一级而进入下级就绪队列,如此继续,直至降到进程的基本优先级。而一个进程从阻塞态变为就绪态时要提高优先级,最后会将I/O型和交互式进程留在较高优先级队列,如下图: