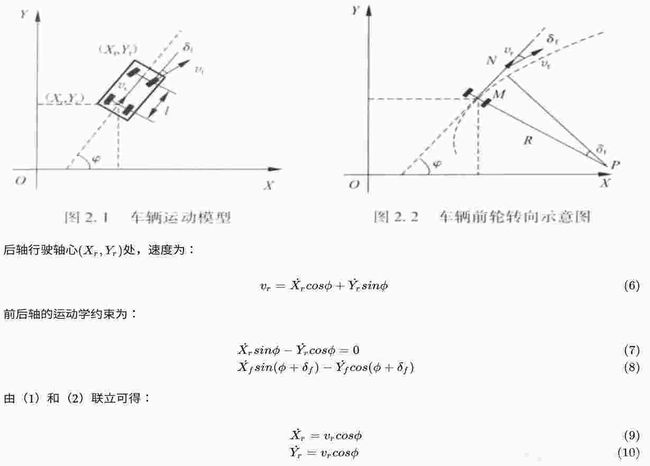
车辆模型推导以及MPC控制实现
车辆预测模型(MPC)



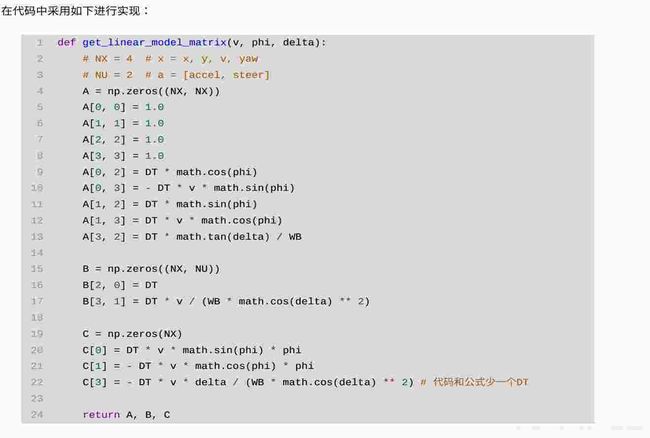
 在代码中采用如下进行实现:
在代码中采用如下进行实现:
def linear_mpc_control(xref, xbar, x0, dref):
"""
linear mpc control
xref: reference point参考点
xbar: operational point当前点
x0: initial state
dref: reference steer angle
"""
x = cvxpy.Variable((NX, T + 1))
u = cvxpy.Variable((NU, T))
cost = 0.0
constraints = []
for t in range(T):
cost += cvxpy.quad_form(u[:, t], R)# u^T R u
if t != 0:
cost += cvxpy.quad_form(xref[:, t] - x[:, t], Q) # (xref-x)^T Q (xref-x)
A, B, C = get_linear_model_matrix(
xbar[2, t], xbar[3, t], dref[0, t])
constraints += [x[:, t + 1] == A * x[:, t] + B * u[:, t] + C]
if t < (T - 1):
cost += cvxpy.quad_form(u[:, t + 1] - u[:, t], Rd) # u_{t-1}^T Rd u_{t-1}
# 前轮方向角度小于最大角加速度×DT
constraints += [cvxpy.abs(u[1, t + 1] - u[1, t])
<= MAX_DSTEER * DT]
# 最后一个点
cost += cvxpy.quad_form(xref[:, T] - x[:, T], Qf) # (xref-x)^T Qf (xref-x)
constraints += [x[:, 0] == x0]
constraints += [x[2, :] <= MAX_SPEED]
constraints += [x[2, :] >= MIN_SPEED]
constraints += [cvxpy.abs(u[0, :]) <= MAX_ACCEL]
constraints += [cvxpy.abs(u[1, :]) <= MAX_STEER]
# 构造最小二乘问题
prob = cvxpy.Problem(cvxpy.Minimize(cost), constraints)
# 求解最小二乘
prob.solve(solver=cvxpy.ECOS, verbose=False)
if prob.status == cvxpy.OPTIMAL or prob.status == cvxpy.OPTIMAL_INACCURATE:
ox = get_nparray_from_matrix(x.value[0, :]) # 状态量x,
oy = get_nparray_from_matrix(x.value[1, :]) # 状态量y
ov = get_nparray_from_matrix(x.value[2, :]) # 状态量v
oyaw = get_nparray_from_matrix(x.value[3, :]) # 状态量yaw
oa = get_nparray_from_matrix(u.value[0, :]) # 控制量accel
odelta = get_nparray_from_matrix(u.value[1, :]) # 控制量steer
else:
print("Error: Cannot solve mpc..")
oa, odelta, ox, oy, oyaw, ov = None, None, None, None, None, None
return oa, odelta, ox, oy, oyaw, ov