ros21讲
learing_topic笔记
前言:本文是参照古月前辈的教学视频后的个人记录(欢迎相互交流)
前期知识点:
工作空间是一个存放工程开发相关的文件夹
src:代码空间(source space)
build:编译空间(build space)
devel:开发空间(development space)
install:安装空间(install space)
创建工作空间`
mkdir -p ~/ros_21/src
cd ~/ros_21/src
catkin_init_workspace
编译工作空间
cd ~/ros_21/
catkin_make
catkin_make install#放置可执行文件
设置环境变量
source devel/setup.bash
检查环境变量
echo $ROS_PACKAGE_PATH
创建功能包
cd ~/ros_21/src
catkin_creat_pkg test_pkg roscpp rospy std_msgs
编译功能包
cd ~/ros_21/
catkin_make
设置环境变量
source devel/setup.bash
learning_topic
以下为话题操作过程:
1.创建功能包
cd ~/ros_21/src
catkin_creat_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
2.编写发布者代码(参照教学例程)
创建cpp文件(方法有很多…)
vim velocity_publisher.cpp
发布者publisher的编程实现
如何实现一个发布者
1.初始化ROS节点 向ros master 注册节点信息,包括发布的话题名和话题中的消息类型
2.创建消息数据
3.按照一定频率循环发布消息
/*
该教程讲发布/turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include 3.配置发布者代码编译规则cmake文件
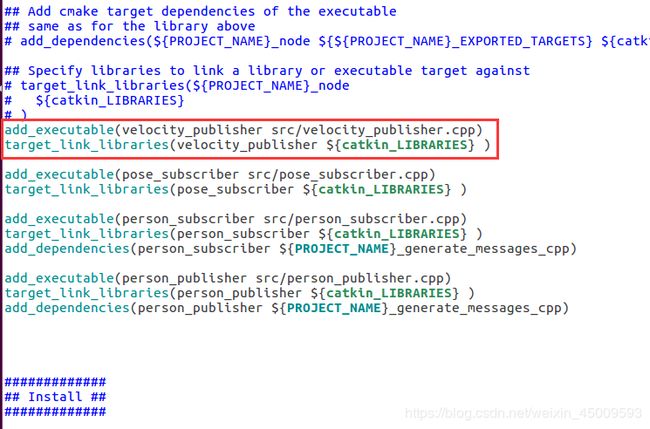
打开learning_topic文件夹中的CMakeLists.txt文件,进行编辑,在以下位置,加入以下两句:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES} )
4.编译并运行
以下为命令行:
cd ~/ros_21
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic velocity_publisher
5.运行结果: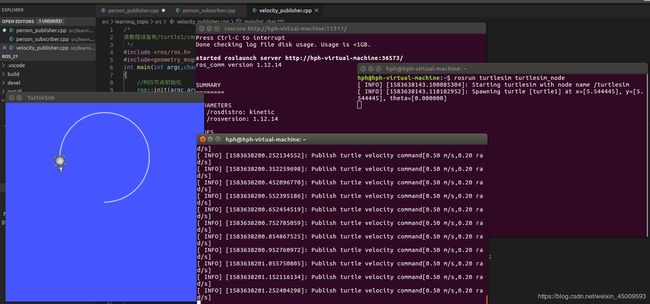
订阅者subscribe的编程实现
如何实现一个订阅者
先创建一个cpp文件(略)
1.初始化ros节点
2.订阅需要的话题
3.循环等待话题消息,接收到消息后进入回调函数
4.在回调函数中完成消息处理
1.编写订阅者程序
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include 2.配置订阅者代码编译规则cmake文件
(具体操作参考上面的配置发布者)
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES} )
3.编译并运行
cd ~/ros_21
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic pose_subscriber
也可以用键盘控制节点控制海龟运动
rosrun turtlesim turtle_teleop_key
用键盘控制海龟,并观察发布者中断的信息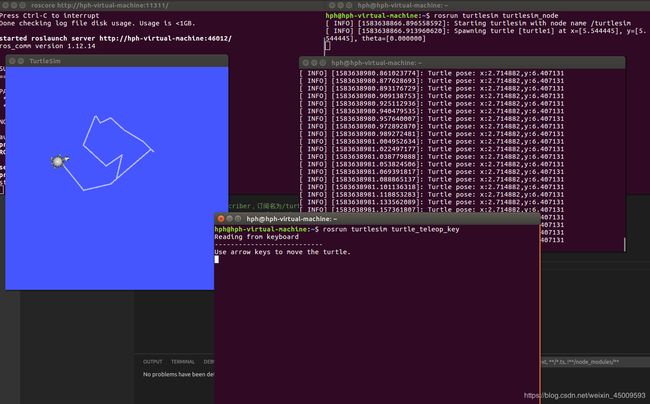
话题消息的定义与使用
自定义话题消息
1.定义msg文件
在learning_topic文件夹中创建msg文件夹
并在新建的msg文件夹中创建Person.msg文件
打开Person.msg输入以下(自定义的消息):
string name
uint8 sex
uint8 age
uint8 unknown=0
uint8 male=1
uint8 female=2
2.在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
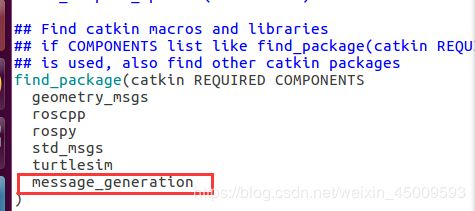
3.打开CMakeList.txt添加编译选项
在find_package()里添加
message_generation
位置如图:
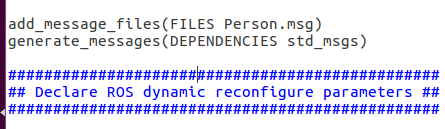
添加以下:
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
位置如图:
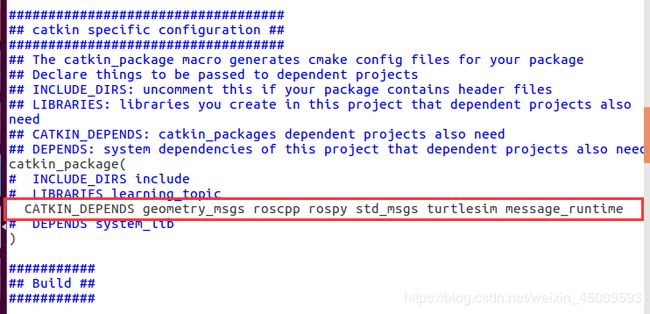
添加如下:
catkin_package()
位置位图:
4.编译生成语言相关文件
回到工作空间,然后catkin_make
5.编写代码
person_subscriber.cpp
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 编写person_publisher.cpp
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include 6.在CMakeLists.txt里添加以下:
(参考上面的CMakeLists.txt图片)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES} )
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES} )
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
7.再回到工作空间进行编译
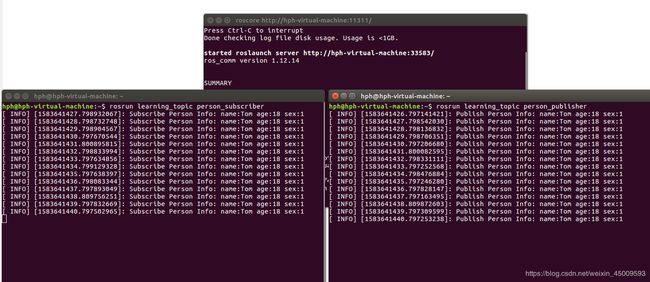
运行程序
roscore
rosrun learning_topic person_subscriber
rosrun learning_topic person_publisher
效果如图:
总结:熟悉创建功能包,配置文件的过程,重点理解代码内容。另外还有python版本,也可以学习,便于理解。