极度快速的近似最近邻搜索算法(EFANNA)-学习笔记
博客地址:www.mzwang.top
微信公众号:whenever5225
引言
极度快速的近似最近邻搜索算法(EFANNA)是NSG的作者之前的一篇论文,这篇论文主要介绍用更快的方法建立KNN图并且建立一个高性能的KNN图索引。这种方法建KNN图时采用类似于Wei等人提出的方案(地址),首先初始化一个KNN图,然后再使用NN-descent的方法精细化KNN图。该论文提出的方法改进了初始化KNN图的方式,使用更快的方法来初始化KNN图。在基于近似KNN图搜索时,大多方法都是随机选择入口点,该论文使用树结构而不是随机的方式来选择入口点。
简介
基于图的方法的两个问题
- 贪婪过程往往会收敛到局部最优
- 建立 k N N kNN kNN 图非常耗时
尝试解决第一个问题的一个方法是不随机选择入口点,而是基于辅助结构(如哈希方法,树方法)为查询点提供更好的初始化入口点。
尝试解决第二个问题的很多方法是要创建近似的 k N N kNN kNN 图,大都采用了 divide-and-conquer策略(分治策略),这种策略主要分三步:
- 划分整个数据集为多个小的子集
- 在子集中暴力搜索获得许多重叠子图
- 归并子图,用NN-expansion的方法细化图
该论文提出的EFANNA方法的索引包括两部分:
- 多重随机分层结构
- 近似 k N N kNN kNN 图
在离线阶段,首先,EFANNA通过快速分层的方式多次划分数据集为许多子集;接着,自底向上创建近似 k N N kNN kNN 图,在此过程中,EFANNA利用这些结构定位可能的最近邻居,并利用这些候选来更新图,最后采用改进了类似于NN-Descent的方法来精细化索引。
在在线阶段,首先在分层结构中搜索获取查询点的候选邻居(确定入口点),然后使用贪婪方法(NN-expansion)在近似 k N N kNN kNN 图上执行查询。
EFANNA索引构建之随机截断KD树构建算法
EFANNA索引的第一大部分为多个随机分层的结构,作者采用了随机截断的KD树(randomized truncated KD-tree)来实现这一结构,其实还有很多其它方法。作者在给定的数据集 D D D 上建立了多个随机截断KD树。
主要思想
首先给要建立的随机截断KD树的叶子结点所能包含的数据点的个数限定一个上界 K K K ,当输入的数据点的个数小于 K K K 时直接返回,否则的话就进行划分,划分时随机选择一个维度,计算数据集在该维的平均值,然后根据平均值将数据集划分为两个子集,接着递归地对划分的两个子集建立随机截断KD树,直到数据集中点的个数小于 K K K。重复对数据集 D D D 执行上述过程多次建立多个随机截断KD树。
伪代码分析
//输入:
//数据集D;树的数量T;一个叶子结点中的数据点数K
Input:
the data set D, the number of trees T, the number of points in a leaf node K.
//输出:
//随机截断KD树集S
Output:
the randomized truncated KD-tree set S
//构建树的函数BUILDTREE,输入结点和数据点集
function BUILDTREE(Node,PointSet)
//若数据点的个数小于K则直接返回
if size of PointSet < K then
return
else
//随机选择一个维度d
Randomly choose dimension d.
//计算数据集在该维的平均值mid
Calculate the mean mid over PointSet on dimension d.
//根据平均值把数据集平分为两个子集LeftHalf和RightHalf
Divide PointSet evenly into two subsets, LeftHalf and RightHalf, according to mid.
//递归建立左子树
BUILDTREE(Node.LeftChild, LeftHalf)
//递归建立右子树
BUILDTREE(Node.RightChild,RightHalf)
end if
return
end function
//迭代T次,建立T棵树
for all i = 1 to T do
//对数据集D建立第i棵树
BUILDTREE(Rooti,D)
//添加第i棵树根到树集S
Add Rooti to S.
end for
EFANNA索引构建之近似kNN图构建算法
EFANNA索引的另一大部分就是近似kNN图了,作者采用了类似近似最近邻搜索的方法来建立近似kNN图,这个过程包括两个阶段:
- kNN图初始化
- 对初始kNN图进行细化
下面分别进行概括。
kNN图初始化之分层分治算法
作者采用分治的策略来快速获得一个初始化的kNN图。得到一个初始化的kNN图无非就是给基数据集中的每个点初始化邻居,这个过程其实就是在已经建好的几个随机截断KD树上为数据点找邻居,在这里作者采用的方法不过是“分层分治”的策略。
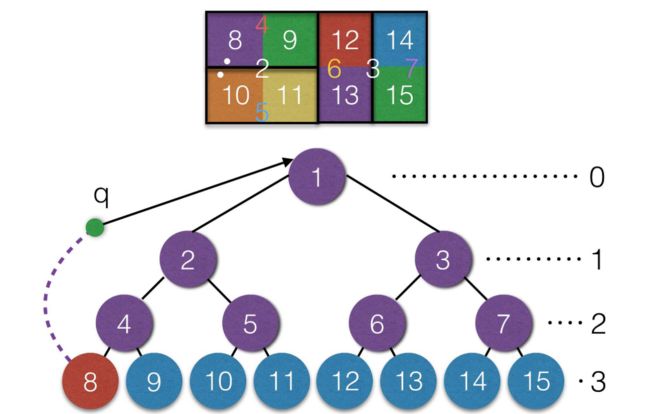 图1 分层分治算法图解
图1 分层分治算法图解
主要思想
对数据集中的每一个数据点,我们都要给它们初始化邻居,对某个数据点初始化邻居时,我们要在已经建立的所有树上以该数据点为查询点进行分层分治查找,也就是说在每棵树上都要查找一遍。下面只详细分析在一颗树上的分层分治过程,多棵树只是重复的过程。
为了便于分析,下面以图1的示例来说明。现在要给数据点 q q q 找邻居(在树中找一些离它较近的数据点),从树根开始执行深度优先搜索进行查找,一直找到标号为8的叶子结点,显然 q q q 也处于这个结点中(整棵树涵盖了所有的数据点),这个叶子结点中的数据点加入到数据点 q q q 的邻居候选集中,此时我们处理的是最底层(深度为3)。标号为1、2和4的结点(非叶结点)是搜索的过程中遍历到的结点。接着该处理倒数第2层(深度为2)了,我们只处理该层中遍历到的结点,也就是结点4了,其它的标号为5、6和7的结点都没有遍历到。结点4的孩子结点分别为结点8和9,因为结点8已经遍历过了,此时我们只处理没有遍历过的孩子结点,因此,我们只处理结点9,对以结点9为根的子树进行深度优先搜索直到某个叶子结点,因为结点9本身就是叶子结点,因此返回的叶子结点也就是它了,把该叶子结点中的数据点加入到数据点 q q q 的邻居候选集中。接着处理第1层,同理选中结点2,然后同理选中它的孩子结点5,对以结点5为根的子树执行深度优先搜索,将返回叶子结点10(上面的局限图可以看出结点10离 q q q 更近),同样把该叶子结点中的数据点加入到数据点 q q q 的邻居候选集中……
上面的那个过程可以一种处理到第0层,即根结点。但是,实际应用时这个过程是很耗时的,因为我们要对多个树重复上述过程,因此,都要处理到根结点是没必要的。在此,可以把能处理到的最小层设定为一个参数Dep,Dep具体值的设定可根据精度和速度的权衡来安排。
明白了上述过程,我们也就很容易明白作者给该算法命名为分层分治的原因了。
伪代码分析
//输入:
//数据集D;近似kNN图的k;树构建算法构建的随机截断KD树集S;处理的最小深度Dep(从叶子向上处理)
Input:
the data set D, the k in approximate kNN graph , the randomized truncated KD-tree set S built with Algorithm 2, the conquer-to depth Dep.
//输出:
//近似kNN图G
Output:
approximate kNN graph G.
//“分”阶段
//使用树构建算法建立多个随机截断KD树,得到树集S
%%Division step
Using Algorithm 2 to build tree, which leads to the input S
//“治”阶段
%% Conquer step
//近似kNN图G初始化为空
G = ∅
//对数据集中的每一个结点i
for all point i in D do
Candidate pool C = ∅
//对树集中的每一棵树t
for all binary tree t in S do
//用数据点i在树t上进行搜索直到叶子结点
search in tree t with point i to the leaf node.
//添加叶子结点中的所有数据点到候选集C
add all the point in the leaf node to C.
//记下叶子结点的深度d
d = depth of the leaf node
//当d大于给定的处理到的最小深度Dep执行下面的循环
while d > Dep do
d = d − 1
//用数据点i在树t上执行深度优先搜索直到深度d,在深度为d的那层搜索到的非叶结点标记为N,它的还没被访问过的孩子结点标记为Sib
Depth-first-search in the tree t with point i to depth d. Suppose N is the non-leaf node on the search path with depth d. Suppose Sib is the child node of N. And Sib is not on the search path of point i.
//在以Sib为根的子树上用数据点i执行深度优先搜索,直到叶子结点,添加叶子结点中所有的数据点到候选集C
Depth-first-search to the leaf node in the subtree of Sib with point i . Add all the points in the leaf node to C.
end while
end for
//保留候选集C中离数据点i最近的K个数据点
Reserve K closest points to i in C.
//添加候选集C中的点到近邻图,作为数据点i的初始化邻居
Add C to G.
end for
初始kNN图的精致化算法
这个过程就是对得到的初始化kNN图进行细化,使其更接近精确的kNN图,从而成为一个高质量的近似kNN图。这里有两种方法,分别为NN-expansion和NN-descent(两者区别详见),实践说明在构建kNN图方面NN-descent更有效,一句话概括它的思想就是各邻居之间更可能彼此互为邻居。
主要思想
精致化算法是在初始kNN图的基础上进行的,精致化之后将得到结果图G。一开始先将结果图初始化为预先建好的初始kNN图,对数据集中的每一个点,它在G中会有一定量的邻居(此时就是初始kNN图中它的邻居),将它的这些邻居之间互相添加为各自的邻居(添加到G中),添加后将新添加的邻居标记为new,对数据集中的所有点都执行上述过程后,对每个点保留其最近的一定量个邻居(预先设定的上界),这便是第一次迭代的过程,也是相对简单的一次。
下面来看第二次迭代。对数据集中的每一个点,它它在G中会有一定量的邻居(此时的邻居有新添加标记为new的,也有初始kNN图中没标记为new的记其标记为old),将它的这些标记为new的邻居(遍历过之后取消new标记记其标记为old)之间互相添加为各自的邻居(同样添加到G中),添加后将新添加的邻居标记为new,不仅如此,对每个标记为new的邻居,还要将所有标记为old的邻居添加到它的邻居中,同时也添加反向边(标记为new的点也要添加到标记为old的点的邻居中),对数据集中的所有点都执行上述过程后,对每个点保留其最近的一定量个邻居(预先设定的上界)。
接下来的各次迭代就和第二次类似了,可以预先设置一个合适的迭代次数。
伪代码分析
//输入:
//初始化的近似kNN图Ginit;数据集D;最大迭代次数Imax;侯选池尺寸P;Gnew中的每个点的最大邻居数L
Input:
an initial approximate k-nearest neighbor graph Ginit, data set D, maximum iteration number Imax, Candidate pool size P, new neighbor checking num L.
//输出:
//结果近似kNN图G
Output:
an approximate kNN graph G.
iter = 0, G = Ginit
//Gnew记录每个点在上一次迭代中新添加的候选邻居集,初始化为Ginit
Graph Gnew records all the new added candidate neighbors of each point. Gnew = Ginit.
//Gold记录每个点在之前的迭代中添加的旧候选邻居集,初始化为空
Graph Gold records all the old candidate neighbors of each point at previous iterations. Gold = ∅
//Grnew记录本次迭代给NNnew中的点添加的NNnew中的点作为邻居
Graph Grnew records all the new added reverse candidate neighbors of each point.
//Grold记录本次迭代给NNold中的点添加的NNnew中的点作为邻居
Graph Grold records all the old reverse candidate neighbors of each point.
//迭代次数小于最大迭代次数时执行循环
while iter < Imax do
Grnew = ∅, Grold = ∅.
for all point i in D do
//数据点i在Gnew中的邻居集NNnew
NNnew is the neighbor set of point i in Gnew.
//数据点i在Gold中的邻居集NNold
NNold is the neighbor set of of point i in Gold.
//对NNnew中某个点j,将其它所有点添加到j在G中的条目中,并标记为新添加的候选邻居,将j添加到
for all point j in NNnew do
for all point k in NNnew do
if j! = k then
//计算数据点j和数据点k的距离
calculate the distance between j and k.
//添加数据点k到G中j的条目,标记k为new
add k to j’s entry in G. mark k as new.
//添加j到G和Grnew中k的条目,标记为new
add j to k’s entry in G and Grnew.
mark j as new.
end if
end for
for all point l in NNold do
calculate the distance between j and l.
//添加l到G中j的条目,标记为old
add l to j’s entry in G. mark l as old.
//添加j到G和Grold中l的条目,标记为old
add j to l’s entry in G and Grold.
mark j as old.
end for
end for
end for
for all point i in D do
//保留距离数据点i最近的P个邻居
Reserve the closest P points to i in respective
//作为结果图的条目
entry of G.
end for
Gnew = Gold = ∅
for all point i in D do
//G中i的邻居集为NN
l = 0. NN is the neighbor set of i in G.
while l < L and l < P do
j = NN[l].
//如果j标记为new
if j is marked as new then
//添加j到Gnew中i的条目
add j to i’s entry in Gnew.
//l统计标记为new的邻居检查的次数
l = l + 1.
else
//添加j到Gold中i的条目
add j to i’s entry in Gold.
end if
end while
end for
Gnew = Gnew ∪ Grnew.
Gold = Gold ∪ Grold
iter = iter + 1
end while
在EFANNA索引上进行近似最近邻搜索
EFANNA的搜索算法伪代码
//输入:
//数据集D;查询向量q;要求的最近邻居数K;EFANNA索引(包括树集Stree和kNN图G);
//侯选池尺寸P;扩展因子(贪婪搜索时每次迭代保留的最大候选邻居数)E;迭代次数I.
Input:
data set D, query vector q, the number K of required nearest neighbors, EFANNA index (including tree set Stree and kNN graph G), the candidate pool size P, the expansion factor E, the iteration number I.
//输出:
//查询点的近似最近邻居
Output:
approximate nearest neighbor set ANNS of the query
iter = 0
NodeList = ∅
candidate set C = ∅
//每个叶子结点包含的数据点的最大个数记为Sleaf
suppose the maximal number of points of leaf node is Sleaf
//树的数量记为Ntree
suppose the number of trees is Ntree
//每棵树需要返回的最大叶子结点个数Nnode
then the maximal node check number is Nnode = P ÷ Sleaf ÷Ntree + 1
//遍历Stree中的树,对每一个树执行深度优先搜索,返回其中离查询最近的Nnode个叶子结点
//并添加到NodeList表中
for all tree i in Stree do
Depth-first search i for top Nnode closest leaf nodes according to respective tree search criteria, add to NodeList
end for
//把NodeList中的叶子结点中的数据点添加到候选集C中
add the points belonging to the nodes in NodeList to C
//保留候选集C中离查询点最近的E个数据点
keep E points in C which are closest to q.
//迭代I次贪婪搜索
while iter < I do
candidate set CC = ∅
//遍历候选集C中的数据点
for all point n in C do
//对于点n,它在kNN图中的邻居集为Sn
Sn is the neighbors of point n based on G.
//遍历Sn中的数据点
for all point nn in Sn do
//如果nn还没被检查
if nn hasn’t been checked then
//把nn添加到CC中
put nn into CC.
end if
end for
end for
//把CC集中的点添加到候选集C中并保留离查询点最近的P个数据点
move all the points in CC to C and keep P points in C which are closest to q.
iter = iter + 1
end while
return ANNS as the closet K points to q in C.
注:作者的实验表明,迭代次数 I = 4 I=4 I=4 就足够了。
参考文献
Fu C , Cai D . EFANNA : An Extremely Fast Approximate Nearest Neighbor Search Algorithm Based on kNN Graph[J]. 2016.