海创物联网一站式解决方案:松下PLC点位状态采集与数据可视化
海创物联网一站式解决方案:松下PLC点位状态采集与数据可视化
本文将以松下FP-X型号的PLC作为采集控制对象,使用海创微联采集控制系统对PLC的点位进行采集和控制,然后将采集到的数据上传到海创物联网平台,海创物联网平台将数据实时可视化。
文章分为3部分:
-
松下FP-X的编程软件FPWin_GR的使用:PLC的连接,IP地址的修改,端口的分配,主程序的编写,下载和点位的监控。
-
海创微联采集控制系统的使用:控件的部署,采集和控制节点的使用。
-
海创物联网平台的使用:产品和设备的创建,数据可视化。
想了解产品更多内容和获取产品软件请加下方微信,接下来进入正题。

官网介绍 : 海创物联网 www.gkiiot.com
一、FPWin_GR
首先简单说明一下FPWin_GR的使用,FPWin_GR是松下PLC的编程软件之一,用于编写梯形图和修改PLC参数等。

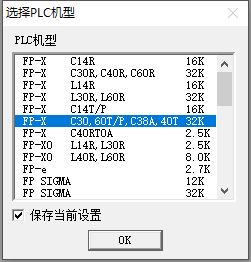
打开FPWin_GR,创建新文件,选择PLC的型号FP-X,点击OK,具体操作如下。
1. 连接BCNet-FP
因为松下FP-X系列不自带以太网模块,所以需要连接上一个以太网模块BCNet-FP进行远程采集控制。连接方式为PLC圆口线连接BCNet-FP,BCNet-FP网线连接交换机。

注:首次连接BCNet-FP,要先将电脑IP修改为和BCNet-FP同一个网段,BCNet-FP和电脑用网线直连通讯,然后修改BCNet-FP的IP,之后就可以通过交换机以太网通讯了。
2. 修改IP地址和配置端口
浏览器登录BCNet-FP的IP地址,默认为192.168.1.178(这是BCNet-FP的出厂IP地址,第一次修改时直连电脑登录),登录账号密码,默认为admin。

之后在以太网接口参数中修改IP地址,端口默认502。

修改完成后BCNet-FP会自动重启,下次登录时用修改后的IP。
3. 梯形图
编写
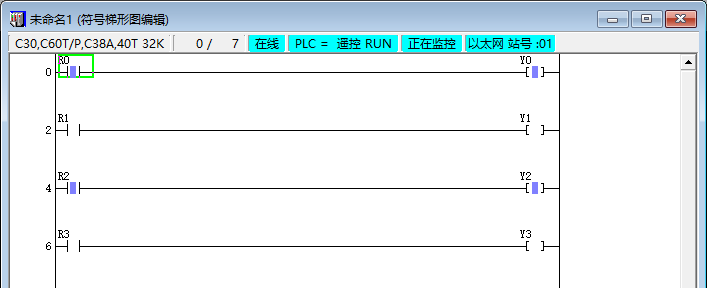
FPWin_GR中输入为X,输出为Y,中间寄存器为R。通过控制R或其它可写入点间接控制Y,如下图,用R0-R3分别控制Y0-Y3。

转换、下载
写好程序后,先点击转换,点击文件中的下载到PLC,将程序和参数下载到PLC当中。


点位监控
下载后在上方找到转至在线,然后点击启动监视控,就能实时查看到点位的状态。

二、海创微联采集控制系统
使用海创微联采集控制系统对松下PLC进行采集。
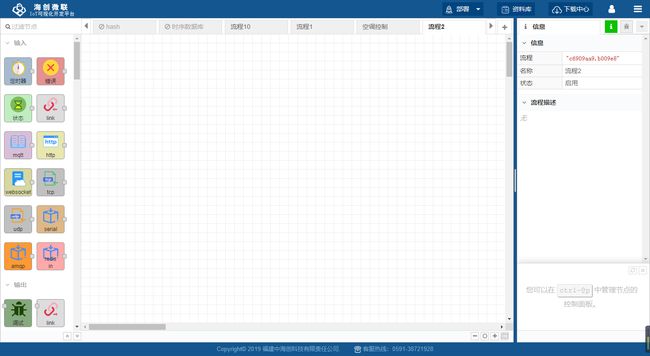
BCNet-FP是通过modbus协议通讯,所以我们从左边的采集引擎中拖出modbus控件。
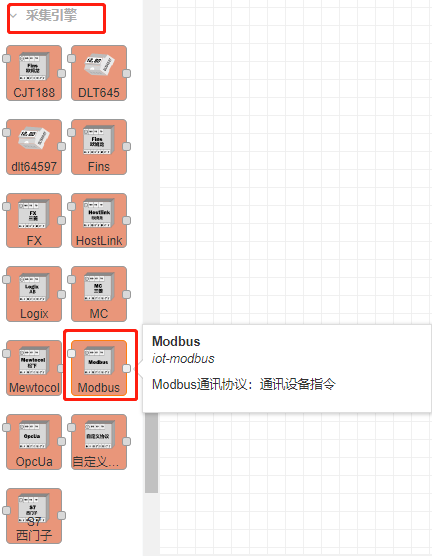
按下图配置,读取PLC数据。

modbus控件具体配置如下,读取Y时功能码为FC1,写入4个采集量,地址为0123。
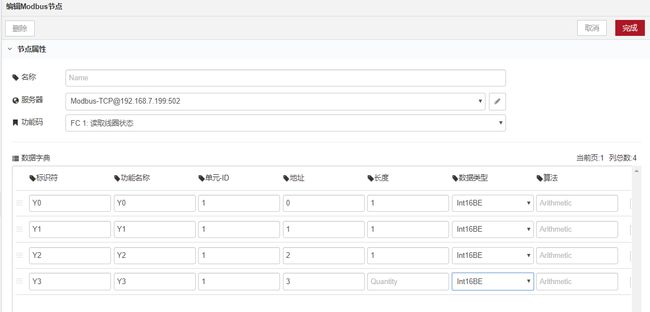
协议为modbus-TCP,地址为BCNet-FP配置的地址,端口默认502,通讯模式Defautil。

配置完成后,点击部署。
![]()
点击定时器,调试界面显示当前Y点的状态。

回到FPWin_GR的监视界面,修改R0和R2为ON。
回到海创微联采集控制系统,点击定时器,采集到Y0和Y2闭合。

文章末尾附上快速复用码,导入便可快速部署。
三、海创物联网平台
海创物联网平台能够与海创微联采集控制系统进行联动,将采集到的数据可视化。

1. 产品和设备的创建
登录海创物联网平台,依次点击设备管理-产品-创建产品。

然后在该产品下创建一个设备,操作顺序如下图。

2. 采集量的定义
回头查看刚刚创建的产品,在功能定义中,自定义功能中添加采集量。
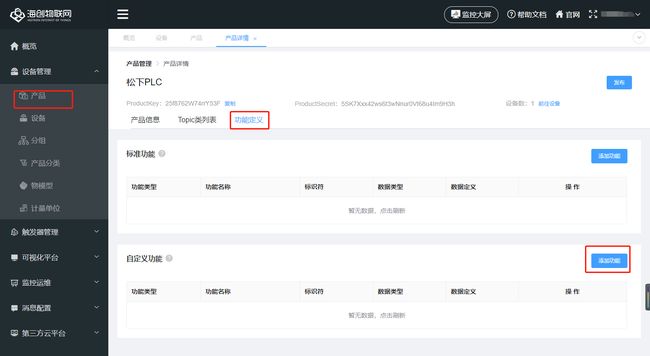
注:标识符一定要和采集引擎中的标识符一致,功能名称无所谓。



查看创建的设备,能看到3个唯一标识,产品标识(ProductKey)、设备标识(DeviceKey)、设备密钥(DeviceSecret)。

3. 可视化
回到海创微联采集控制系统,在物联网云平台中拖出海创IOT,输入3个唯一标识,点击部署。



海创IOT显示连接成功,回到FPWin_GR,将R0和R1断开,R1和R3闭合,点击定时器,调试界面显示如下。


回到海创物联网平台,在设备的运行状态中可以实时显示Y0-Y3的状态了。

四、附录
快速复用码
[{"id":"231dff3b.db3e","type":"inject","z":"5f25f2b2.cf464c","name":"","topic":"","payload":"","payloadType":"date","repeat":"","crontab":"","once":false,"onceDelay":0.1,"x":635,"y":120,"wires":[["a350e81a.7d72d8"]]},{"id":"8d5d21c4.414d8","type":"debug","z":"5f25f2b2.cf464c","name":"","active":true,"tosidebar":true,"console":false,"tostatus":false,"complete":"payload","x":1015,"y":120,"wires":[]},{"id":"a350e81a.7d72d8","type":"iot-modbus","z":"5f25f2b2.cf464c","name":"","server":"f9703e80.0628d","fc":"Coil","columns":[{"Key":"Y0","Label":"Y0","UnitId":"1","Address":"0","Quantity":"1","ValueType":"Int16BE","Arithmetic":""},{"Key":"Y1","Label":"Y1","UnitId":"1","Address":"1","Quantity":"1","ValueType":"Int16BE","Arithmetic":""},{"Key":"Y2","Label":"Y2","UnitId":"1","Address":"2","Quantity":"1","ValueType":"Int16BE","Arithmetic":""},{"Key":"Y3","Label":"Y3","UnitId":"1","Address":"3","Quantity":"1","ValueType":"Int16BE","Arithmetic":""}],"x":815,"y":120,"wires":[["8d5d21c4.414d8"]]},{"id":"f9703e80.0628d","type":"iot-modbus-client","z":"","name":"","clienttype":"Modbus-TCP","host":"192.168.7.199","post":"502","tcptype":"Defautl","serialport":"COM1","serialtype":"RTU-Buffered","baudrate":"9600","databits":"8","stopbits":"1","parity":"None","unitid":"","timeout":"2000","sleep":"60","showActivity":false}]
本篇文章由一文多发平台ArtiPub自动发布