Sensor系列四 Framework层分析_Service端
一、Sensor framwork service介绍
在上一节Framework层分析_Client端已经介绍了Sensor在framework中的框架结构,本文主要分析SensorService的启动流程和HAL层的交互工作。其中SensorService中主要包含以下类:
(1)SensorService.cpp
./frameworks/native/service/sensorservice/SensorService.cpp
SensorService是Android Sensor Framework最核心的模块,它实现了主要的Sensor控制流和数据流逻辑,完成Sensor参数的配置,数据分发,Client请求数据处理等功能。
(2)BinderService
./frameworks/native/include/binder/BinderService.h
BinderService是Android Service框架的主要类,它提供了Service的生命周期管理、进程将通信、请求响应处理等功能。Android总的大部分Service都会继承此类。
(3)SensorEventConnect
./framework/native/libs/gui/ISensorEventConnect.cpp
SensorEventConnect是sensor数据传输通道,当Client开始监听某一个Sensor时,一个对应的SensorEventConnect将会被创建,Server端在接收到Sensor数据后,通过写入到SensorEventConnect传输给Client端。
(4)SensorDevice
./framework/native/services/sensorservice/SensorDevice.cpp
该类主要负责与HAL层交互。下面看下程序走向图:
二、SensorService流程分析
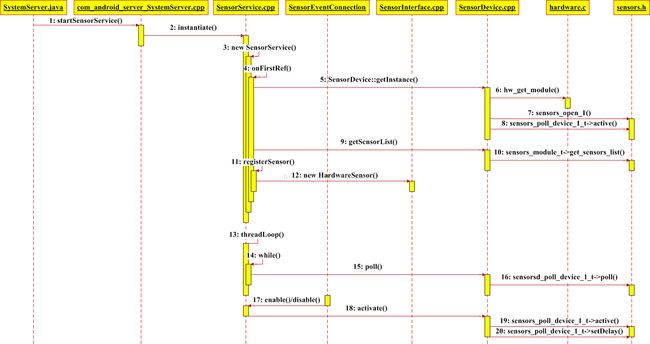
在系统启动时,SystemServer中会启动需要开启的服务,系统服务通过调用startSensorService启动sensorService,调用JNI,通过SensorService::instantiate实例化SensorService对象。
SensorService创建之后,将会调用SensorService::onFirstRefs()方法,来完成初始化工作,首先通过SensorDevice::getInstance来创建对象dev,调用dev.getSensorList(&list)获取传感器列表,传入sensor_t类型的list,创建HardwareSensor对象,传递给registerSensor,注册传感器,下面看下SensorService的onFirstRef方法。
void SensorService::onFirstRef()
{
ALOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());//实例化SensorDevice
if (dev.initCheck() == NO_ERROR) {
sensor_t const* list;
ssize_t count = dev.getSensorList(&list);//获取sensorlist
if (count > 0) {
ssize_t orientationIndex = -1;
bool hasGyro = false, hasAccel = false, hasMag = false;
uint32_t virtualSensorsNeeds =
(1< 0) {
batchingSupported = true;
break;
}
}
if (batchingSupported) {
// Increase socket buffer size to a max of 100 KB for batching capabilities.
mSocketBufferSize = MAX_SOCKET_BUFFER_SIZE_BATCHED;
} else {
mSocketBufferSize = SOCKET_BUFFER_SIZE_NON_BATCHED;
}
// Compare the socketBufferSize value against the system limits and limit
// it to maxSystemSocketBufferSize if necessary.
FILE *fp = fopen("/proc/sys/net/core/wmem_max", "r");
char line[128];
if (fp != NULL && fgets(line, sizeof(line), fp) != NULL) {
line[sizeof(line) - 1] = '\0';
size_t maxSystemSocketBufferSize;
sscanf(line, "%zu", &maxSystemSocketBufferSize);
if (mSocketBufferSize > maxSystemSocketBufferSize) {
mSocketBufferSize = maxSystemSocketBufferSize;
}
}
if (fp) {
fclose(fp);
}
mWakeLockAcquired = false;
mLooper = new Looper(false);
const size_t minBufferSize = SensorEventQueue::MAX_RECEIVE_BUFFER_EVENT_COUNT;
mSensorEventBuffer = new sensors_event_t[minBufferSize];
mSensorEventScratch = new sensors_event_t[minBufferSize];
mMapFlushEventsToConnections = new SensorEventConnection const * [minBufferSize];
mCurrentOperatingMode = NORMAL;
mNextSensorRegIndex = 0;
for (int i = 0; i < SENSOR_REGISTRATIONS_BUF_SIZE; ++i) {
mLastNSensorRegistrations.push();
}
mInitCheck = NO_ERROR;
mAckReceiver = new SensorEventAckReceiver(this);
mAckReceiver->run("SensorEventAckReceiver", PRIORITY_URGENT_DISPLAY);
run("SensorService", PRIORITY_URGENT_DISPLAY);
}
}
} 1、创建SensorDevice实例;
2、调用SensorDevice.getSensorList(),获取Sensor模块所有传感器列表;
3、为每一个传感器注册监听器,还同事注册实现了6个虚拟传感器。
在上面介绍了与HAL层交互的SensorDevice,下面看看方法调用的过程:
SensorDevice::SensorDevice()
: mSensorDevice(0),
mSensorModule(0)
{
//根据module_id加载hal层的so库
status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID,(hw_module_t const**)&mSensorModule);
ALOGE_IF(err, "couldn't load %s module (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorModule) {
err = sensors_open_1(&mSensorModule->common, &mSensorDevice);//打开设备
ALOGE_IF(err, "couldn't open device for module %s (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorDevice) {
if (mSensorDevice->common.version == SENSORS_DEVICE_API_VERSION_1_1 ||
mSensorDevice->common.version == SENSORS_DEVICE_API_VERSION_1_2) {
ALOGE(">>>> WARNING <<< Upgrade sensor HAL to version 1_3");
}
sensor_t const* list;
ssize_t count = mSensorModule->get_sensors_list(mSensorModule, &list);//获取sensor数目
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; iactivate(
//使能每一个sensor
reinterpret_cast(mSensorDevice), list[i].handle, 0);
}
}
}
} 1、调用HAL层的hw_get_module()方法打开设备;
2、调用sensor.h的sensor_open_1方法打开设备;
3、调用sensor_poll_device_1_t->activate模块使能sensor。
sensor使能后,下面分析SensorService层中数据的传输。
三、SensorService数据传输
从下图中可以看出SensorClient和SensorService端各有一个线程用于数据的传输,SensorService端的线程复制从hal层读取数据,并将数据写入到Client端创建的管道中,SensorClient则通过管道读取数据,上报给app层。

其中SensorService数据的读取是在SensorService::threadLoop()方法中实现的:
bool SensorService::threadLoop()
{
ALOGD("nuSensorService thread starting...");
const size_t minBufferSize = SensorEventQueue::MAX_RECEIVE_BUFFER_EVENT_COUNT;
const size_t numEventMax = minBufferSize / (1 + mVirtualSensorList.size());
SensorDevice& device(SensorDevice::getInstance());
const size_t vcount = mVirtualSensorList.size();
const int halVersion = device.getHalDeviceVersion();
do {
ssize_t count = device.poll(mSensorEventBuffer, numEventMax);//调用hal层的 poll__poll获取数据
if (count < 0) {
ALOGE("sensor poll failed (%s)", strerror(-count));
break;
}
// Reset sensors_event_t.flags to zero for all events in the buffer.
for (int i = 0; i < count; i++) {
mSensorEventBuffer[i].flags = 0;
}
SortedVector< sp > activeConnections;//获得传感器连接对象
populateActiveConnections(&activeConnections);
Mutex::Autolock _l(mLock);
bool bufferHasWakeUpEvent = false;
for (int i = 0; i < count; i++) {
if (isWakeUpSensorEvent(mSensorEventBuffer[i])) {
bufferHasWakeUpEvent = true;
break;
}
}
if (bufferHasWakeUpEvent && !mWakeLockAcquired) {
setWakeLockAcquiredLocked(true);
......
// Map flush_complete_events in the buffer to SensorEventConnections which called
// flush on the hardware sensor. mapFlushEventsToConnections[i] will be the
// SensorEventConnection mapped to the corresponding flush_complete_event in
// mSensorEventBuffer[i] if such a mapping exists (NULL otherwise).
for (int i = 0; i < count; ++i) {
mMapFlushEventsToConnections[i] = NULL;
if (mSensorEventBuffer[i].type == SENSOR_TYPE_META_DATA) {
const int sensor_handle = mSensorEventBuffer[i].meta_data.sensor;
SensorRecord* rec = mActiveSensors.valueFor(sensor_handle);
if (rec != NULL) {
mMapFlushEventsToConnections[i] = rec->getFirstPendingFlushConnection();
rec->removeFirstPendingFlushConnection();
}
}
}
// Send our events to clients. Check the state of wake lock for each client and release the
// lock if none of the clients need it.
bool needsWakeLock = false;
size_t numConnections = activeConnections.size();
for (size_t i=0 ; i < numConnections; ++i) {
if (activeConnections[i] != 0) {
activeConnections[i]->sendEvents(mSensorEventBuffer, count, mSensorEventScratch,
mMapFlushEventsToConnections);//将数据写入指定的sensor管道中,供client端使用
needsWakeLock |= activeConnections[i]->needsWakeLock();
// If the connection has one-shot sensors, it may be cleaned up after first trigger.
// Early check for one-shot sensors.
if (activeConnections[i]->hasOneShotSensors()) {
cleanupAutoDisabledSensorLocked(activeConnections[i], mSensorEventBuffer,
count);
}
}
}
if (mWakeLockAcquired && !needsWakeLock) {
setWakeLockAcquiredLocked(false);
}
} while (!Thread::exitPending());//判断Thread是否结束
ALOGW("Exiting SensorService::threadLoop => aborting...");
abort();
return false;
} typedef struct sensors_event_t {
int32_t version;
int32_t sensor; //标识符
int32_t type; //传感器类型
int32_t reserved0;
int64_t timestamp; //时间戳
union {
float data[16];
sensors_vec_t acceleration; //加速度
sensors_vec_t magnetic; //磁矢量
sensors_vec_t orientation; //方向
sensors_vec_t gyro; //陀螺仪
float temperature; //温度
float distance; //距离
float light; //光照
float pressure; //压力
float relative_humidity; //相对湿度
};
uint32_t reserved1[4];
} sensors_event_t;作者:frank_zyp
您的支持是对博主最大的鼓励,感谢您的认真阅读。
本文无所谓版权,欢迎转载。