iTop-4412精英版的u-boot-2017.11移植教程(二)
接着上一节 iTop-4412精英版的u-boot-2017.11移植教程(一)
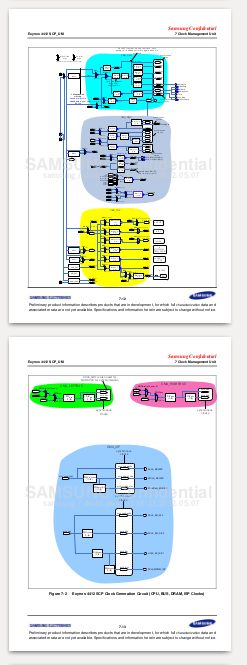
exynos4412时钟体系初始化
本节参考由讯为提供的uboot源码,以及讯为提供的三星原厂exynos4412芯片手册
感谢由百度提供的百度翻译服务
(一)根据 三星原厂exynos4412芯片手册 确定芯片时钟初始化的顺序
(1)设置DIV的值
1. CLK_DIV_CPU0
2. CLK_DIV_CPU1
3. CLK_DIV_DMC0
4. CLK_DIV_DMC1
5. CLK_DIV_TOP
6. CLK_DIV_LEFTBUS
7. CLK_DIV_RIGHTBUS
8. CLK_DIV_FSYS0
9. CLK_DIV_FSYS1
10. CLK_DIV_FSYS2
11. CLK_DIV_FSYS3
(2)设置PLL的值
1. APLL_CON1
2. APLL_CON0
3. MPLL_CON1
4. MPLL_CON0
5. EPLL_CON2
6. EPLL_CON1
7. EPLL_CON0
8. VPLL_CON2
9. VPLL_CON1
10. VPLL_CON0
(3)设置LOCKTIME的值
1. APLL LOCKTIME
2. MPLL LOCKTIME
3. EPLL LOCKTIME
4. VPLL LOCKTIME
(4)设置MUX的值
1. CLK_SRC_CPU
2. CLK_SRC_DMC
3. CLK_SRC_TOP0
4. CLK_SRC_TOP1
5. CLK_SRC_LEFTBUS
6. CLK_SRC_RIGHTBUS
7. CLK_SRC_PERIL0
8. CLK_SRC_FSYS
(二)代码
clock_init_exynos4.c
void system_clock_init(void)
{
unsigned int set, clr, clr_src_cpu, clr_pll_con0, clr_src_dmc;
struct exynos4x12_clock *clk = (struct exynos4x12_clock *)
samsung_get_base_clock();
/************************************************************
* Step 1:
*
* Set PDIV, MDIV, and SDIV values (Refer to (A, M, E, V)
* Change other PLL control values
************************************************************/
/**
* Set dividers for MOUTcore = 1000 MHz
*
* DOUTcore = MOUTcore / (CORE_RATIO +1) = 1000 MHz (0)
* ACLK_COREM0 = ARMCLK / (COREM0_RATIO +1) = 250 MHz (3)
* ACLK_COREM1 = ARMCLK / (COREM1_RATIO +1) = 125 MHz (7)
* PERIPHCLK = DOUTcore / (PERIPH_RATIO + 1) = 1000 MHz (0)
* ATCLK = MOUTcore / (ATB_RATIO + 1) = 200 MHz (4)
* PCLK_DBG = ATCLK / (PCLK_DBG_RATIO + 1) = 100 MHz (1)
* SCLKapll = MOUTapll / (APLL_RATIO + 1) = 500 MHz (1)
* ARMCLK = DOUTcore / (CORE2_RATIO + 1) = 1000 MHz (0)
*/
/** CLK_DIV_CPU0 */
clr = CORE_RATIO(7) | COREM0_RATIO(7) | COREM1_RATIO(7) |
PERIPH_RATIO(7) | ATB_RATIO(7) | PCLK_DBG_RATIO(7) |
APLL_RATIO(7) | CORE2_RATIO(7);
set = CORE_RATIO(0) | COREM0_RATIO(3) | COREM1_RATIO(7) |
PERIPH_RATIO(0) | ATB_RATIO(4) | PCLK_DBG_RATIO(1) |
APLL_RATIO(1) | CORE2_RATIO(0);
clrsetbits_le32(&clk->div_cpu0, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_cpu0) & DIV_STAT_CPU0_CHANGING)
continue;
/**
* Set dividers for MOUThpm = 1000 MHz (MOUTapll)
*
* DOUTcopy = MOUThpm / (COPY_RATIO + 1) = 200 MHz (4)
* SCLK_HPM = DOUTcopy / (HPM_RATIO + 1) = 200 MHz (0)
* ACLK_CORES = ARMCLK / (CORES_RATIO + 1) = 1000 MHz (0)
*/
/** CLK_DIV_CPU1 */
clr = COPY_RATIO(7) | HPM_RATIO(7) | CORES_RATIO(7);
set = COPY_RATIO(4) | HPM_RATIO(0) | CORES_RATIO(0);
clrsetbits_le32(&clk->div_cpu1, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_cpu1) & DIV_STAT_CPU1_CHANGING)
continue;
/**
* Set dividers for -->
* MOUTdmc = 800 MHz
* MOUTdphy = 800 MHz
*
* ACLK_ACP = MOUTdmc / (ACP_RATIO + 1) = 200 MHz (3)
* PCLK_ACP = ACLK_ACP / (ACP_PCLK_RATIO + 1) = 100 MHz (1)
* SCLK_DPHY = MOUTdphy / (DPHY_RATIO + 1) = 400 MHz (1)
* SCLK_DMC = MOUTdmc / (DMC_RATIO + 1) = 400 MHz (1)
* ACLK_DMCD = SCLK_DMC / (DMCD_RATIO + 1) = 200 MHz (1)
* ACLK_DMCP = ACLK_DMCD / (DMCP_RATIO + 1) = 100 MHz (1)
*/
/** CLK_DIV_DMC0 */
clr = ACP_RATIO(7) | ACP_PCLK_RATIO(7) | DPHY_RATIO(7) |
DMC_RATIO(7) | DMCD_RATIO(7) | DMCP_RATIO(7);
set = ACP_RATIO(3) | ACP_PCLK_RATIO(1) | DPHY_RATIO(1) |
DMC_RATIO(1) | DMCD_RATIO(1) | DMCP_RATIO(1);
clrsetbits_le32(&clk->div_dmc0, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_dmc0) & DIV_STAT_DMC0_CHANGING)
continue;
/**
* For:
* MOUTg2d = 800 MHz
* MOUTc2c = 800 Mhz
* MOUTpwi = 24 MHz
*
* SCLK_G2D_ACP = MOUTg2d / (G2D_ACP_RATIO + 1) = 200 MHz (3)
* SCLK_C2C = MOUTc2c / (C2C_RATIO + 1) = 400 MHz (1)
* SCLK_PWI = MOUTpwi / (PWI_RATIO + 1) = 24 MHz (0)
* ACLK_C2C = SCLK_C2C / (C2C_ACLK_RATIO + 1) = 200 MHz (1)
* DVSEM_RATIO : It decides frequency for PWM frame time slot in DVS emulation mode.
* DPM_RATIO : It decides frequency of DPM channel clock.
*/
/** CLK_DIV_DMC1 */
clr = G2D_ACP_RATIO(15) | C2C_RATIO(7) | PWI_RATIO(15) |
C2C_ACLK_RATIO(7) | DVSEM_RATIO(127) | DPM_RATIO(127);
set = G2D_ACP_RATIO(3) | C2C_RATIO(1) | PWI_RATIO(0) |
C2C_ACLK_RATIO(1) | DVSEM_RATIO(1) | DPM_RATIO(1);
clrsetbits_le32(&clk->div_dmc1, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_dmc1) & DIV_STAT_DMC1_CHANGING)
continue;
/**
* MOUTmpll = 800 MHz
* MOUTvpll = 54 MHz
*
* ACLK_200 = MOUTACLK_200 / (ACLK_200_RATIO + 1) = 200 MHz (3)
* ACLK_100 = MOUTACLK_100 / (ACLK_100_RATIO + 1) = 100 MHz (7)
* ACLK_160 = MOUTACLK_160 / (ACLK_160_RATIO + 1) = 160 MHz (4)
* ACLK_133 = MOUTACLK_133 / (ACLK_133_RATIO + 1) = 133 MHz (5)
* ONENAND = MOUTONENAND_1 / (ONENAND_RATIO + 1) = 160 MHz (0)
* ACLK_266_GPS = MOUTACLK_266_GPS / (ACLK_266_GPS_RATIO + 1) = 266 MHz (2)
* ACLK_400_MCUISP = MOUTACLK_400_MCUISP / (ACLK_400_MCUISP_RATIO + 1) = 400 MHz (1)
*/
/** CLK_DIV_TOP */
clr = ACLK_200_RATIO(7) | ACLK_100_RATIO(15) | ACLK_160_RATIO(7) |
ACLK_133_RATIO(7) | ONENAND_RATIO(7) | ACLK_266_GPS_RATIO(7) | ACLK_400_MCUISP_RATIO(7);
set = ACLK_200_RATIO(3) | ACLK_100_RATIO(7) | ACLK_160_RATIO(4) |
ACLK_133_RATIO(5) | ONENAND_RATIO(0) | ACLK_266_GPS_RATIO(2) | ACLK_400_MCUISP_RATIO(1);
clrsetbits_le32(&clk->div_top, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_top) & DIV_STAT_TOP_CHANGING)
continue;
/**
* ACLK_GDL = MOUTGDL / (GDL_RATIO + 1) = 200 MHz (3)
* ACLK_GPL = MOUTGPL / (GPL_RATIO + 1) = 100 MHz (1)
*/
/** CLK_DIV_LEFTBUS */
clr = GDL_RATIO(7) | GPL_RATIO(7);
set = GDL_RATIO(3) | GPL_RATIO(1);
clrsetbits_le32(&clk->div_leftbus, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_leftbus) & DIV_STAT_LEFTBUS_CHANGING)
continue;
/**
* ACLK_GDR = MOUTGDR / (GDR_RATIO + 1) = 200 MHz (3)
* ACLK_GPR = MOUTGPR / (GPR_RATIO + 1) = 100 MHz (1)
*/
/** CLK_DIV_RIGHTBUS */
clr = GPR_RATIO(7) | GDR_RATIO(7);
set = GPR_RATIO(3) | GDR_RATIO(1);
clrsetbits_le32(&clk->div_rightbus, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_rightbus) & DIV_STAT_RIGHTBUS_CHANGING)
continue;
/**
* MOUTUART[1-4] = 800 Mhz (MPLL)
*
* SCLK_UART0 = MOUTUART0 / (UART0_RATIO + 1) = 100 MHz (7)
* SCLK_UART1 = MOUTUART1 / (UART1_RATIO + 1) = 100 MHz (7)
* SCLK_UART2 = MOUTUART2 / (UART2_RATIO + 1) = 100 MHz (7)
* SCLK_UART3 = MOUTUART3 / (UART3_RATIO + 1) = 100 MHz (7)
* SCLK_UART4 = MOUTUART4 / (UART4_RATIO + 1) = 100 MHz (7)
*/
/** CLK_DIV_PERIL0 */
clr = UART0_RATIO(15) | UART1_RATIO(15) | UART2_RATIO(15) |
UART3_RATIO(15) | UART4_RATIO(15);
set = UART0_RATIO(7) | UART1_RATIO(7) | UART2_RATIO(7) |
UART3_RATIO(7) | UART4_RATIO(7);
clrsetbits_le32(&clk->div_peril0, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_peril0) & DIV_STAT_PERIL0_CHANGING)
continue;
/**
* For MOUTMMC0-3 = 800 MHz (MPLL)
*
* SCLK_MIPIHSI = MOUTMIPIHSI / (MIPIHSI_RATIO + 1) = 200 MHz (3)
*/
/* CLK_DIV_FSYS0 */
clr = MIPIHSI_RATIO(15);
set = MIPIHSI_RATIO(3);
clrsetbits_le32(&clk->div_fsys0, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_fsys0) & DIV_STAT_FSYS0_CHANGING)
continue;
/**
* For MOUTMMC0-3 = 800 MHz (MPLL)
*
* DOUTMMC0 = MOUTMMC0 / (MMC0_RATIO + 1) = 100 MHz (7)
* SCLK_MMC0 = DOUTMMC0 / (MMC0_PRE_RATIO + 1) = 50 MHz (1)
* DOUTMMC1 = MOUTMMC1 / (MMC1_RATIO + 1) = 100 MHz (7)
* SCLK_MMC1 = DOUTMMC1 / (MMC1_PRE_RATIO + 1) = 50 MHz (1)
*/
/* CLK_DIV_FSYS1 */
clr = MMC0_RATIO(15) | MMC0_PRE_RATIO(255) | MMC1_RATIO(15) |
MMC1_PRE_RATIO(255);
set = MMC0_RATIO(7) | MMC0_PRE_RATIO(1) | MMC1_RATIO(7) |
MMC1_PRE_RATIO(1);
clrsetbits_le32(&clk->div_fsys1, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_fsys1) & DIV_STAT_FSYS1_CHANGING)
continue;
/**
* For MOUTmmc0-3 = 800 MHz (MPLL)
*
* DOUTmmc3 = MOUTmmc3 / (MMC2_RATIO + 1) = 100 MHz (7)
* sclk_mmc3 = DOUTmmc3 / (MMC2_PRE_RATIO + 1) = 50 MHz (1)
* DOUTmmc2 = MOUTmmc2 / (MMC3_RATIO + 1) = 100 MHz (7)
* sclk_mmc2 = DOUTmmc2 / (MMC3_PRE_RATIO + 1) = 50 MHz (1)
*/
/* CLK_DIV_FSYS2 */
clr = MMC2_RATIO(15) | MMC2_PRE_RATIO(255) | MMC3_RATIO(15) |
MMC3_PRE_RATIO(255);
set = MMC2_RATIO(7) | MMC2_PRE_RATIO(1) | MMC3_RATIO(7) |
MMC3_PRE_RATIO(1);
clrsetbits_le32(&clk->div_fsys2, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_fsys2) & DIV_STAT_FSYS2_CHANGING)
continue;
/**
* For MOUTmmc4 = 800 MHz (MPLL)
*
* DOUTmmc4 = MOUTmmc4 / (MMC4_RATIO + 1) = 100 MHz (7)
* sclk_mmc4 = DOUTmmc4 / (MMC4_PRE_RATIO + 1) = 50 MHz (1)
*/
/* CLK_DIV_FSYS3 */
clr = MMC4_RATIO(15) | MMC4_PRE_RATIO(255);
set = MMC4_RATIO(7) | MMC4_PRE_RATIO(1);
clrsetbits_le32(&clk->div_fsys3, clr, set);
/* Wait for divider ready status */
while (readl(&clk->div_stat_fsys3) & DIV_STAT_FSYS3_CHANGING)
continue;
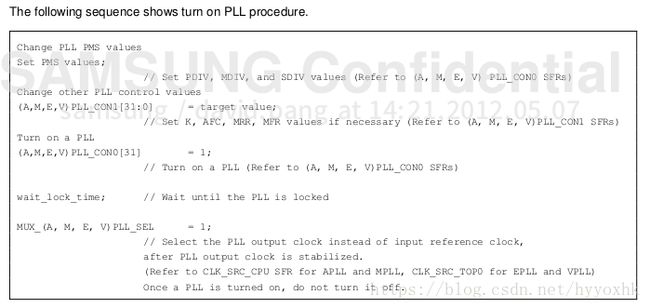
/************************************************************
* Step 2:
*
* Set K, AFC, MRR, MFR values if necessary
* (Refer to (A, M, E, V)PLL_CON1 SFRs)
* Turn on a PLL (Refer to (A, M, E, V) PLL_CON0 SFRs)
************************************************************/
/* Set APLL to 1000MHz */
/** APLL_CON1 */
clr = AFC(31) | LOCK_CON_DLY(31) | LOCK_CON_IN(3) |
LOCK_CON_OUT(3) |FEED_EN(1)| AFC_ENB(1) |
DCC_ENB(1) | BYPASS(1) |RESV0(1) | RESV1(1);
set = AFC(0) | LOCK_CON_DLY(8) | LOCK_CON_IN(3) |
LOCK_CON_OUT(0) |FEED_EN(0)| AFC_ENB(0) |
DCC_ENB(1) | BYPASS(0) |RESV0(0) | RESV1(0);
clrsetbits_le32(&clk->apll_con1, clr, set);
/** APLL_CON0 */
clr_pll_con0 = SDIV(7) | PDIV(63) | MDIV(1023) | FSEL(1) | PLL_ENABLE(1);
set = SDIV(0) | PDIV(3) | MDIV(125) | FSEL(0) | PLL_ENABLE(1);
clrsetbits_le32(&clk->apll_con0, clr_pll_con0, set);
/* Wait for PLL to be locked */
while (!(readl(&clk->apll_con0) & PLL_LOCKED_BIT))
continue;
/* Set MPLL to 800MHz */
/** MPLL_CON1 */
clr = AFC(31) | LOCK_CON_DLY(31) | LOCK_CON_IN(3) |
LOCK_CON_OUT(3) |FEED_EN(1)| AFC_ENB(1) |
DCC_ENB(1) | BYPASS(1) |RESV0(1) | RESV1(1);
set = AFC(0) | LOCK_CON_DLY(8) | LOCK_CON_IN(3) |
LOCK_CON_OUT(0) |FEED_EN(0)| AFC_ENB(0) |
DCC_ENB(1) | BYPASS(0) |RESV0(0) | RESV1(0);
clrsetbits_le32(&clk->mpll_con1, clr, set);
/** MPLL_CON0 */
clr_pll_con0 = SDIV(7) | PDIV(63) | MDIV(1023) | FSEL(1) | PLL_ENABLE(1);
set = SDIV(0) | PDIV(3) | MDIV(100) | FSEL(0) | PLL_ENABLE(1);
clrsetbits_le32(&clk->mpll_con0, clr_pll_con0, set);
/* Wait for PLL to be locked */
while (!(readl(&clk->mpll_con0) & PLL_LOCKED_BIT))
continue;
/* Set EPLL to 192MHz */
/** EPLL_CON2 */
clr = ICP_BOOST(7) | EV_FSEL(1) | FVCO_EN(1) | EV_BYPASS(1) |
SSCG_EN(1) | EV_AFC_ENB(1) | EV_DCC_ENB(1) | EXTAFC(1);
set = ICP_BOOST(0) | EV_FSEL(1) | FVCO_EN(1) | EV_BYPASS(1) |
SSCG_EN(0) | EV_AFC_ENB(0) | EV_DCC_ENB(1) | EXTAFC(0);
clrsetbits_le32(&clk->epll_con2, clr, set);
/** EPLL_CON1 */
/* there is null */
/** EPLL_CON0 */
clr_pll_con0 = SDIV(7) | PDIV(63) | MDIV(1023) | FSEL(1) | PLL_ENABLE(1);
set = SDIV(2) | PDIV(2) | MDIV(64) | FSEL(0) | PLL_ENABLE(1);
clrsetbits_le32(&clk->epll_con0, clr_pll_con0, set);
/* Wait for PLL to be locked */
while (!(readl(&clk->epll_con0) & PLL_LOCKED_BIT))
continue;
/* Set VPLL to 54MHz */
/** VPLL_CON2 */
clr = ICP_BOOST(7) | EV_FSEL(1) | FVCO_EN(1) | EV_BYPASS(1) |
SSCG_EN(1) | EV_AFC_ENB(1) | EV_DCC_ENB(1) | EXTAFC(1);
set = ICP_BOOST(0) | EV_FSEL(1) | FVCO_EN(1) | EV_BYPASS(1) |
SSCG_EN(0) | EV_AFC_ENB(0) | EV_DCC_ENB(1) | EXTAFC(0);
clrsetbits_le32(&clk->vpll_con2, clr, set);
/** VPLL_CON1 */
/* there is null */
/** VPLL_CON0 */
clr_pll_con0 = SDIV(7) | PDIV(63) | MDIV(1023) | FSEL(1) | PLL_ENABLE(1);
set = SDIV(3) | PDIV(3) | MDIV(54) | FSEL(0) | PLL_ENABLE(1);
clrsetbits_le32(&clk->vpll_con0, clr_pll_con0, set);
/* Wait for PLL to be locked */
while (!(readl(&clk->vpll_con0) & PLL_LOCKED_BIT))
continue;
/************************************************************
*Step 3:
*
* Wait until the PLL is locked
************************************************************/
clr = PLL_LOCKTIME(65535);
/** APLL LOCKTIME 1000MHz */
set = PLL_LOCKTIME(PDIV(3) * 270);
clrsetbits_le32(&clk->apll_lock, clr, set);
/** MPLL LOCKTIME 800MHz */
set = PLL_LOCKTIME(PDIV(3) * 270);
clrsetbits_le32(&clk->mpll_lock, clr, set);
/** EPLL LOCKTIME 192MHz */
set = PLL_LOCKTIME(PDIV(2) * 270);
clrsetbits_le32(&clk->epll_lock, clr, set);
/** VPLL LOCKTIME 54MHz */
set = PLL_LOCKTIME(PDIV(3) * 270);
clrsetbits_le32(&clk->vpll_lock, clr, set);
/************************************************************
* Step 4:
*
* Select the PLL output clock instead of input reference clock,
* after PLL output clock is stabilized.
* (Refer to CLK_SRC_CPU SFR for APLL and MPLL,
* CLK_SRC_TOP0 for EPLL and VPLL)
* Once a PLL is turned on, do not turn it off.
************************************************************/
/**
* before set system clocks,we switch system clocks src to FINpll
*
* Bit values: 0 ; 1
* MUX_APLL_SEL: FIN_PLL ; MOUTAPLLFOUT
* MUX_CORE_SEL: MOUTAPLL ; SCLKMPLL
* MUX_HPM_SEL: MOUTAPLL ; SCLKMPLL
* MUX_MPLL_USER_SEL_C: FINPLL ; FOUTMPLL
*/
/** CLK_SRC_CPU */
clr_src_cpu = MUX_APLL_SEL(1) | MUX_CORE_SEL(1) |
MUX_HPM_SEL(1) | MUX_MPLL_USER_SEL_C(1);
set = MUX_APLL_SEL(1) | MUX_CORE_SEL(0) | MUX_HPM_SEL(0) |
MUX_MPLL_USER_SEL_C(1);
clrsetbits_le32(&clk->src_cpu, clr_src_cpu, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_cpu) & MUX_STAT_CPU_CHANGING)
continue;
/**
* Set CMU_DMC default clocks src to APLL
*
* Bit values: 0 ; 1
* MUX_C2C_SEL: SCLKMPLL ; SCLKAPLL
* MUX_DMC_BUS_SEL: SCLKMPLL ; SCLKAPLL
* MUX_DPHY_SEL: SCLKMPLL ; SCLKAPLL
* MUX_MPLL_SEL: FINPLL ; MOUT_MPLL_FOUT
* MUX_PWI_SEL: 0110 (MPLL); 0111 (EPLL); 1000 (VPLL); 0(XXTI)
* MUX_G2D_ACP0_SEL: SCLKMPLL ; SCLKAPLL
* MUX_G2D_ACP1_SEL: SCLKEPLL ; SCLKVPLL
* MUX_G2D_ACP_SEL: OUT_ACP0 ; OUT_ACP1
*/
/** CLK_SRC_DMC */
clr_src_dmc = MUX_C2C_SEL(1) | MUX_DMC_BUS_SEL(1) |
MUX_DPHY_SEL(1) | MUX_MPLL_SEL(1) |
MUX_PWI_SEL(15) | MUX_G2D_ACP0_SEL(1) |
MUX_G2D_ACP1_SEL(1) | MUX_G2D_ACP_SEL(1);
set = MUX_C2C_SEL(0) | MUX_DMC_BUS_SEL(0) | MUX_DPHY_SEL(0) |
MUX_MPLL_SEL(1) | MUX_PWI_SEL(0) | MUX_G2D_ACP0_SEL(0) |
MUX_G2D_ACP1_SEL(0) | MUX_G2D_ACP_SEL(0);
clrsetbits_le32(&clk->src_dmc, clr_src_dmc, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_dmc) & MUX_STAT_DMC_CHANGING)
continue;
/**
* Set CMU_TOP default clocks src to APLL
*
* Bit values: 0 ; 1
* MUX_ONENAND_1_SEL MOUTONENAND ; SCLKVPLL
* MUX_EPLL_SEL FINPLL ; FOUTEPLL
* MUX_VPLL_SEL FINPLL ; FOUTEPLL
* MUX_ACLK_200_SEL SCLKMPLL ; SCLKAPLL
* MUX_ACLK_100_SEL SCLKMPLL ; SCLKAPLL
* MUX_ACLK_160_SEL SCLKMPLL ; SCLKAPLL
* MUX_ACLK_133_SEL SCLKMPLL ; SCLKAPLL
* MUX_ONENAND_SEL ACLK_133 ; ACLK_160
*/
/* CLK_SRC_TOP0 */
clr = MUX_ONENAND_1_SEL(1) | MUX_EPLL_SEL(1) | MUX_VPLL_SEL(1) |
MUX_ACLK_200_SEL(1) | MUX_ACLK_100_SEL(1) | MUX_ACLK_160_SEL(1) |
MUX_ACLK_133_SEL(1) | MUX_ONENAND_SEL(1);
set = MUX_ONENAND_1_SEL(0) | MUX_EPLL_SEL(1) | MUX_VPLL_SEL(1) |
MUX_ACLK_200_SEL(0) | MUX_ACLK_100_SEL(0) | MUX_ACLK_160_SEL(0) |
MUX_ACLK_133_SEL(0) | MUX_ONENAND_SEL(1);
clrsetbits_le32(&clk->src_top0, clr, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_top0) & MUX_STAT_TOP0_CHANGING)
continue;
/**
* Bit values: 0 ; 1
* MUX_ACLK_266_GPS_SEL SCLKMPLL_USER_T ; SCLKAPLL
* MUX_ACLK_400_MCUISP_SEL SCLKMPLL_USER_T ; SCLKAPLL
* MUX_MPLL_USER_SEL_T FINPLL ; SCLKMPLLL
* MUX_ACLK_266_GPS_SUB_SEL FINPLL ; DIVOUT_ACLK_266_GPS
* MUX_ACLK_200_SUB_SEL FINPLL ; DIVOUT_ACLK_200
* MUX_ACLK_400_MCUISP_SUB_SEL FINPLL
*/
/* CLK_SRC_TOP1 */
clr = MUX_ACLK_266_GPS_SEL(1) | MUX_ACLK_400_MCUISP_SEL(1) |
MUX_MPLL_USER_SEL_T(1) | MUX_ACLK_266_GPS_SUB_SEL(1) |
MUX_ACLK_200_SUB_SEL(1) | MUX_ACLK_400_MCUISP_SUB_SEL(1);
set = MUX_ACLK_266_GPS_SEL(0) | MUX_ACLK_400_MCUISP_SEL(0) |
MUX_MPLL_USER_SEL_T(1) | MUX_ACLK_266_GPS_SUB_SEL(1) |
MUX_ACLK_200_SUB_SEL(1) | MUX_ACLK_400_MCUISP_SUB_SEL(1);
clrsetbits_le32(&clk->src_top1, clr, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_top1) & MUX_STAT_TOP1_CHANGING)
continue;
/* CLK_SRC_LEFTBUS */
clr = MUX_GDL_SEL(1) | MUX_MPLL_USER_SEL_L(1);
set = MUX_GDL_SEL(0) | MUX_MPLL_USER_SEL_L(1);
clrsetbits_le32(&clk->src_leftbus, clr, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_leftbus) & MUX_STAT_LEFTBUS_CHANGING)
continue;
/* CLK_SRC_RIGHTBUS */
clr = MUX_GDR_SEL(1) | MUX_MPLL_USER_SEL_R(1);
set = MUX_GDR_SEL(0) | MUX_MPLL_USER_SEL_R(1);
clrsetbits_le32(&clk->src_rightbus, clr, set);
/* Wait for mux change */
while (readl(&clk->mux_stat_rightbus) & MUX_STAT_RIGHTBUS_CHANGING)
continue;
/** CLK_SRC_PERIL0 */
clr = UART0_SEL(15) | UART1_SEL(15) | UART2_SEL(15) |
UART3_SEL(15) | UART4_SEL(15);
set = UART0_SEL(6) | UART1_SEL(6) | UART2_SEL(6) |
UART3_SEL(6) | UART4_SEL(6);
clrsetbits_le32(&clk->src_peril0, clr, set);
/** CLK_SRC_FSYS */
clr = MMC1_SEL(15) | MMC2_SEL(15) | MMC3_SEL(15) |
MMC4_SEL(15) | MIPIHSI_SEL(1);
set = MMC1_SEL(6) | MMC2_SEL(6) | MMC3_SEL(6) |
MMC4_SEL(6) | MIPIHSI_SEL(0);
clrsetbits_le32(&clk->src_fsys, clr, set);
}itop4412_setup.h
#ifndef _ITOP4412_SETUP_H
#define _ITOP4412_SETUP_H
#include u-boot-2017.11最重要的部分已经完成了,下一节把一些细节部分写一下,就全部完成了
下一节
iTop-4412精英版的u-boot-2017.11移植教程(三)